


[摘 要]首先分析了蜂群自主作戰的需求以及傳統技術架構存在的主要問題。其次,闡述了區塊鏈技術在構建蜂群作戰系統體系中的優勢。從體系結構、網絡架構、共識算法、智能合約等方面給出了一種基于區塊鏈的導彈蜂群協同制導方案。最后,對該方案的效能進行了仿真評估。研究表明:基于區塊鏈的協同機制,按照智能合約規則分配制導律協同量,各節點依靠分布式的協同制導律,可以順利地完成協同攻擊任務。
區塊鏈被認為是繼蒸汽機、電力、互聯網之后的下一代顛覆性核心技術,其應用正從金融領域逐步向經濟、社會、軍事領域延伸。
隨著體系對抗的加劇和智能化技術的發展,蜂群作戰被認為是未來作戰的主要樣式。其中,協同環境下的信息對抗仍是奪取勝利的核心。美國空軍少校NeilB.Barnas將這種高度競爭性的環境描述為三個領域內的激烈競爭,即反電磁頻譜(counter-electromagneticspectrum)、反傳感器(counter-sensor)和反決策(counter-decision)。在此基礎上,提出了“數據戰斗”(data-fighting)的概念,并將其定義為,保護己方生成、傳播、儲存、處理及利用信息的能力,同時能夠干擾破壞敵方從事相同的工作。這實際上仍是敵我雙方在協同體系對抗環境下觀察-判斷-決策-行動(OODA)環的博弈,其主要表現在:
一是干擾與抗干擾博弈。未來作戰,電磁環境十分復雜,自然環境變化莫測,干擾方式層出不窮。基于單枚導彈的作戰模式,由于受彈目位置、制導模式、開機時序、傳感器數量等限制,難以突破敵方多層次、多手段、多模式干擾。而多彈協同系統具有時間、空間和功能上的分布性、多樣性和并行性等特點,具備不同時段分時工作、多站探測定位、多模式相互彌補、多平臺相互印證等優勢,可以有效提升抗干擾性能和對群目標的識別跟蹤能力。
二是決策與反決策的博弈。未來作戰中,信息不完備成為常態,打擊時間敏感目標成為核心關鍵。導彈攻防作戰中,敵方在傳感器的支持下,具備在導彈發射后采取針對性對抗措施的條件。目前導彈作戰指揮的主要問題是決策鏈條長,造成決策慢;導彈按照射前事先裝訂的程序飛行,難以適應戰場環境的變化。而群彈自主作戰具有自主、實時、在線等特點,為實現敵變我變提供了有效模式。
三是攻擊與抗攻擊的博弈。飽和攻擊是高技術戰爭中打擊敵方重要目標,實現多方向、多高度、大數量同時對防空武器進行突防,是提高導彈突防概率的一種重要作戰模式。多彈協同系統可以依據不同的作戰任務以及具體的戰場環境選擇最佳的方案并搭載不同的作戰功能載荷,通過多枚導彈之間的聯合和協同,提高目標打擊成功概率,從而獲得最大的作戰效能。
傳統的基于中心節點和信任環境的群彈系統一般采取“領彈-從彈”模式,存在一定的問題,一是系統缺乏健壯性,中央節點(領彈)是整個系統的“瓶頸”,如果該節點出現故障、遭到損毀或受到干擾,將導致整個系統的崩潰。二是需要各從彈不斷將自身狀態與探測到的信息傳送到中央節點,這對彈群通信鏈接的可靠性提出了很高的要求。三是所有的計算集中在領彈,計算量大,求解復雜度高,對于大規模復雜問題消耗的時間長,并且難以找到最優解。具體來講,在組網方面,采取有中心網絡,抗毀重組能力弱、環境適應能力差;在加密方面,難以解決跨指揮網、業務網、彈群網的信任問題;在判斷決策方面,采取基于完整信息和可信節點的共識機制,可能難以求解;在智能化方面,多采用的是地面遙控或有限的自動程序,智能化程度還不高。鑒于上述問題,這類系統的作戰效能在實際對抗條件下將存在較大疑問。針對這些問題,結合區塊鏈技術的優勢,本文擬重點探討軍事領域中基于區塊鏈的導彈蜂群協同制導機制。
1 區塊鏈技術的優勢
# #1.1 比特幣與區塊鏈的關系# #
區塊鏈技術出現以來,由于其在非信任環境下具有安全、抗毀、容錯、優化、自動等優勢,引起了世界各國的高度重視,紛紛發布相關戰略規劃,加大投入開展理論、技術、應用的研究。然而,不少人認為,區塊鏈技術只適合以比特幣為代表的金融領域,并不適合向其他領域拓展,在軍事領域應用更是無稽之談。究其原因,主要是將比特幣等同于區塊鏈。實際上,區塊鏈是支撐比特幣的基礎技術架構,而比特幣是區塊鏈迄今為止最成功的一種應用,不應當把二者劃等號。具體來講,區塊鏈包括公有鏈、私有鏈、聯盟鏈等,而比特幣采用的是公有鏈的模式;比特幣網絡基本是完全去中心化的,不同領域類型的區塊鏈網絡可以采取不同的中心化程度;比特幣的加密方法、共識機制、智能合約是根據數字貨幣特定需求定制的,比特幣的性能是效能與效率平衡的結果,滿足的是數字貨幣的需求。而各行業可以依據自身業務需求定制優化。因此,區塊鏈是一種技術,更是一種機制、一種模式,甚至是一種思維和觀念。就軍事應用來講,區塊鏈技術也具有很強的契合性。
# #1.2 區塊鏈技術的核心要義# #
區塊鏈技術的核心可以概括為可信、可靠、自主、自治。可信方面,P2P對等網絡抗毀容錯特性保證了網絡可信,共識機制和智能合約保證了決策可信,分布式記賬、鏈式結構、密碼技術保證了數據可信;可靠方面,抗毀性實現了數據防丟失、防破壞,安全性為數據防篡改、防竊取提供了手段,正確性確保了數據的真實性和完整性;自主是由其自動化和智能化保證的;自治則集中反映在其去中心和去信任化等特征當中。
# #1.3 基于區塊鏈的蜂群作戰模式開辟協同打擊的新模式# #
就導彈蜂群協同作戰體系而言,區塊鏈技術的主要優勢體現在:一是去中心化集體維護提高了系統的魯棒性。蜂群基于分布式系統結構,無中心節點,無固定的領彈(即記帳節點),通過集體維護避免對中心節點的過度依賴,不會由于單一節點或少數節點失能導致整個體系崩潰,從而有效提高了蜂群的抗毀重組能力。二是去信任化提高了復雜對抗環境下蜂群系統的適應性和可用性。未來作戰對抗環境異常復雜,爭奪首先在信息領域展開并貫穿作戰過程始終。為安全起見,在非信任環境下,往往采取“寧可錯殺一千,絕不放過一個”的策略,在保證信息安全的同時,也往往會使己方作戰決策成為無源之水、無本之木,難以為繼。例如,美軍《聯合出版物3-12:網絡空間作戰條令》(JointPublication 3-12:CyberspaceOperations)指出,如果指揮團隊對部分數據或網段不信任,就應當放棄使用整套數據和整個網絡(Whenthe staff perceives that they cannot trust data on a network, orsegment of the network, they should stop using thenetwork/segment),這種做法其實是不恰當的。在實際的作戰環境中,存在非信任造成的復雜性與系統高安全性的悖論:既有敵方干擾破壞,也有作戰環境影響,既有己方可靠性因素,也有己方操作失誤或誤操作。這種情況下,如果對數據和網絡的要求過于苛刻,往往可能無數可用,無網可通、無法決策,最終貽誤戰機。區塊鏈技術和模式的引入,為解決這一難題提供了可行途徑。三是分散式決策提高了復雜環境的適應性和決策的科學性。蜂群根據即時戰場態勢,通過競爭機制選擇最合適的節點作為臨時領彈進行信息融合,融合結果在全網進行驗證達成共識,從而保證了感知信息的準確性、一致性和完整性。另外,區塊鏈共識機制還具有不完全信息條件下決策的基本特征。四是自動化執行提高了系統的自治性和自主性。蜂群通過共識機制完成信息融合、任務分配后,區塊鏈中各個節點可以基于智能合約機制自動進行數據操作。隨著人工智能技術的引入,將實現由基于腳本的程序化模式向基于算法的智能化模式轉變。五是獨特的加密機制和數據結構提高了系統的安全性和可信性。鏈式結構實現了信息的不可逆、可追溯、不可篡改。共識機制可有效剔除惡意節點。哈希等加密算法等則可以解決跨網絡數字證書的一致性問題。
2 基于區塊鏈的技術解決方案
基于區塊鏈的導彈蜂群的主要特點,一是無中心的,彈群無固定的領彈,每個導彈作為平等的網絡節點,共享信息、共享全局知識。二是自主的,彈群在受領任務后,可不依托地面指揮控制實施自治行動。其主要技術難點是在對抗環境下,基于環境多變造成的狀態不確定性和導彈編隊高速飛行帶來的實時性等約束條件,可靠有效地進行信息融合、在線決策、任務分配和協同打擊。其作戰應用場景:
(1)導彈蜂群協同面臨瞬時多變的即時作戰環境。敵我對抗環境具有自演變性:惡意節點攻擊手段具有不確定、對我方探測信息的干擾形式具有多重性、對彈間通信網絡破壞具有全方位性,對彈群區塊鏈的安全性提出嚴峻挑戰。
(2)導彈蜂群協同對時延要求嚴格。區別于比特幣網絡十分鐘出一個區塊,一小時達成確認的機制,導彈飛行速度快、戰場態勢變化快,導彈蜂群需及時形成唯一的區塊鏈,對各節點之間的同步性要求高。
(3)導彈蜂群協同通信環境具有動態性。比特幣區塊鏈主要在靜態環境下穩定通信,而導彈蜂群協同受制于高速飛行的導彈和變化的彈群編隊,其通信具有不穩定性特征。作戰概念如圖1所示。
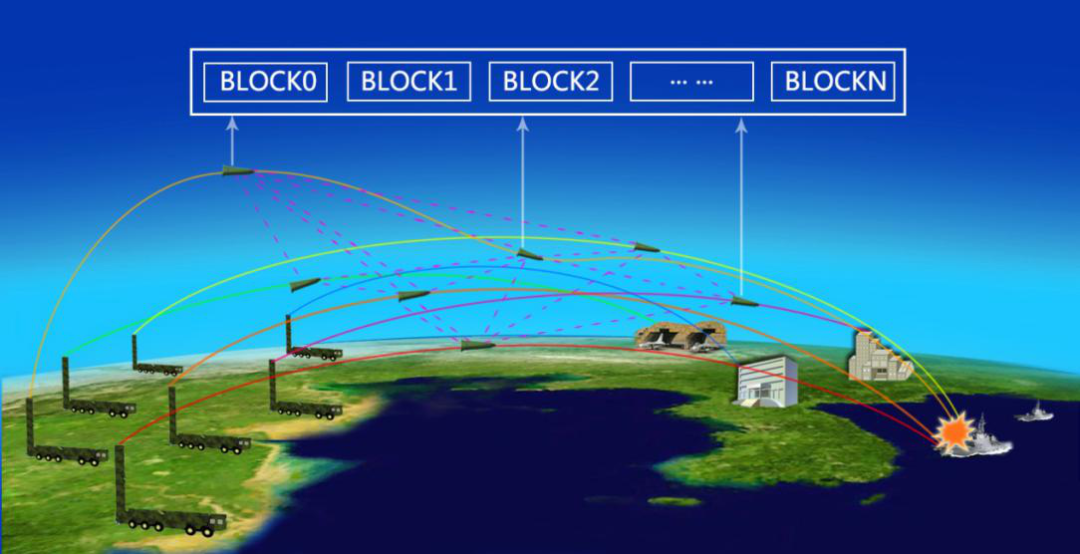
圖1基于區塊鏈的導彈蜂群協同作戰概念圖 # #2.1 技術框架# #
區塊鏈分為公有鏈、聯盟鏈和私有鏈。導彈蜂群協同制導區塊鏈采用聯盟鏈的方式,假設蜂群中同時存在故障節點和惡意節點,新加入節點需要驗證和審核。聯盟鏈這種共識可信的協同系統可應對強干擾、不可信、高動態等復雜飛行環境,實現業務自治協同。
一般來講,區塊鏈技術架構自下而上由網絡層、數據層、共識層、激勵層、合約層和應用層組成。其中,激勵層主要出現在公有鏈中,公有區塊鏈為了讓更多節點自愿加入并承擔任務,往往采用基于經濟手段的激勵機制。基于聯盟鏈的導彈蜂群協同對象單一、各節點利益一致,構成封閉的應用生態。因此導彈蜂群區塊鏈技術架構中不包含激勵層。導彈蜂群區塊鏈體系結構如圖2所示。
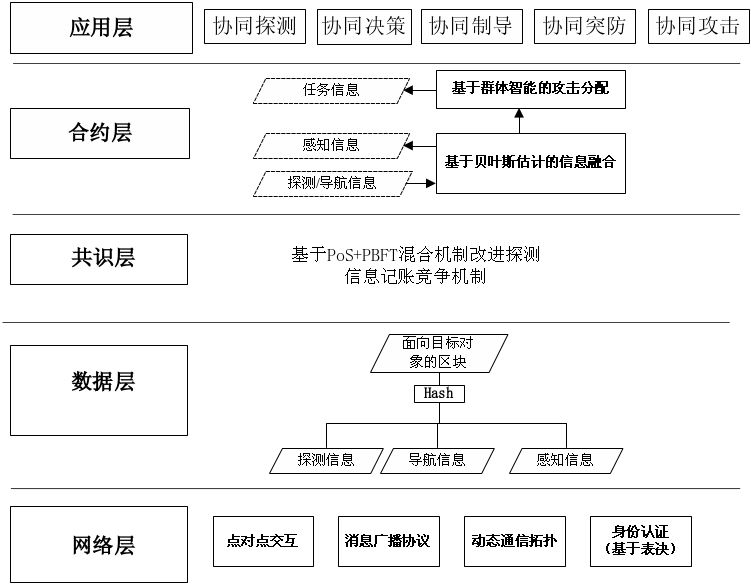
圖2基于區塊鏈的導彈蜂群作戰系統體系結構圖
# #2.2 網絡層##
網絡層底層由傳輸信道和網絡管理系統組成,封裝了P2P組網協議、數據傳播模型和身份驗證機制等,主要完成節點身份認證、節點接入和區塊鏈組網控制。區塊鏈傳輸信道主要基于無中繼的彈間數據鏈,如采取天基衛星中繼方式,中繼衛星應采取多模方式,便于組成無中心網絡,使之具備強抗毀重組能力。
蜂群協同區塊鏈組網方式有靜態和動態兩種方式,靜態方式即導彈發射前確定所有組網參數,蜂群在空中聚集后自動入網。優點是組網簡捷快速,缺點是應變性弱。動態組網是導彈發射前,指定種子節點,確定組網規則,在飛行中,逐個入網、自主組隊、動態管理,其優缺點與靜態方式基本相反。本文重點描述動態入網方式。這種網絡存在種子節點,第二個節點經過種子節點認證后可以加入網絡;后續節點進入時,采用種子節點授權+多數表決的身份認證體制,其主要過程如下:
(1)參數預置。導彈發射前,地面指揮中心為所有待發射導彈分發身份ID和身份證書,通過火力諸元裝訂后存儲于首個區塊。
(2)動態編組。導彈起飛后,首飛節點作為種子節點,其他節點按照約定條件依序加入。
步驟1:節點i向種子節點發送請求,廣播其通過私鑰加密的身份ID、身份證書以及公鑰,種子節點收到后利用公鑰解密,與存儲的身份證書認證一致后,授權節點i入隊。
步驟2:其他節點依次向已入隊節點發送入隊請求,各節點授權后廣播,若超過2/3的節點認證通過則入隊成功,隨即更改蜂群組網參數信息。
(3)出隊管理。蜂群飛行中按照約定時間或條件進行握手確認身份,當存在部分節點失聯或非法節點入侵時,按照群飛組隊原則棄用該節點,斷開通信,更新蜂群組網參數信息。
組網過程如圖3所示。
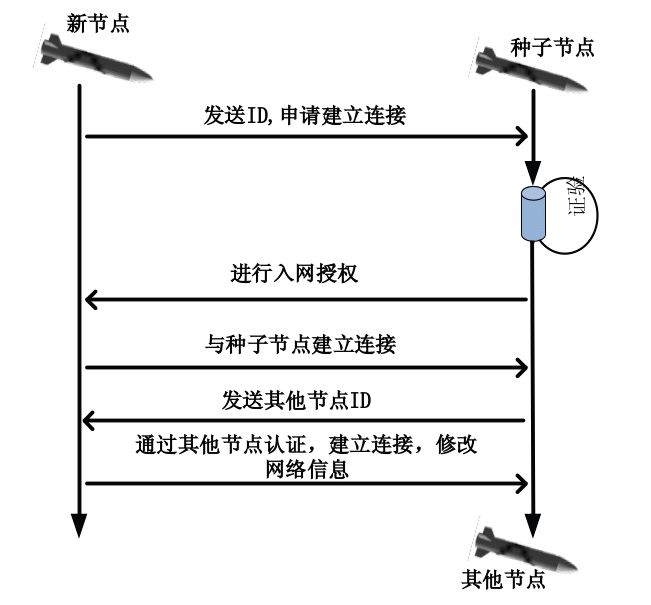
圖3基于區塊鏈的導彈蜂群動態組網過程
# #2.3 數據層##
數據層采用鏈式結構對飛行數據進行存儲,并使用非對稱加密算法保證數據的可追溯和不可篡改。根據協同作戰任務的特點,蜂群協同制導所維護的信息包括目標探測信息、節點導航信息、目標融合信息以及融合信息的共識結果。數據層的信息被組織成為默克爾樹(MerkleTree)結構。默克爾樹結構可實現信息的快速可信交互和驗證,并大幅減少節點的存儲空間。
? ?2.3.1 數據加解密? ?
數據通信傳輸均為密文傳輸,各節點對傳輸信息使用私鑰加密,其他節點使用公鑰解密。記 為節點i的待發送信息內容,則加密后發送的信息為:
為節點i的待發送信息內容,則加密后發送的信息為:
 (1)
(1)
其中 表示使用私鑰
表示使用私鑰 對信息的數字簽名。
對信息的數字簽名。
當其他節點接收到節點i發送來的信息 時,從區塊中尋找節點i的證書,并提取其公鑰,進行解密:
時,從區塊中尋找節點i的證書,并提取其公鑰,進行解密:
 (2)
(2)
式中, 為使用公鑰
為使用公鑰 對數字簽名進行解密的驗證函數。如果result等于消息內容,則說明發送信息合法。
對數字簽名進行解密的驗證函數。如果result等于消息內容,則說明發送信息合法。
? ?2.3.2 區塊頭數據格式? ?
區塊數據包括區塊頭和區塊體數據,區塊頭是進行數據索引、節點身份認證等功能的數據載體,除前一區塊哈希值、時間戳、生成節點地址外,還包括目標數量,用于對區塊中目標數據所占內存進行管理。蜂群協同數據鏈的區塊頭格式見圖4。
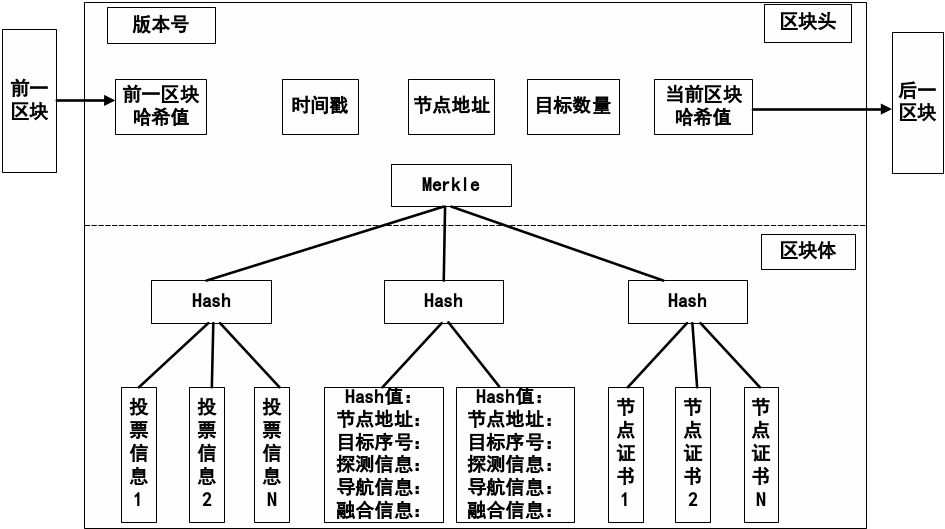
圖4蜂群數據區塊頭格式
? ?2.3.3區塊體數據格式? ?
2.3.3.1節點證書數據
節點證書數據為射前存儲的信息,作為身份管控以及信息來源校驗的依據。
2.3.3.2探測信息單元數據
探測信息單元數據主要包括數據標記、探測信息和節點導航信息,信息以目標為存儲對象單元進行存儲。
(1)數據標記
數據標記是指探測信息單元的屬性,包括目標數量、生成節點標識,用于數據管理。
(2)探測信息
對于可見光、紅外和雷達等不同體制的傳感器,其探測信息均可以抽象為測距、測角信息和目標類型、尺寸等屬性信息。
 (3)
(3)
式中N,K分別表示節點編號和融合次序編號。t代表探測時刻,tid為目標編號,sensor描述傳感器信息描述,如探測概率PD等性能。其他信息包括相對距離 、俯仰視線角
、俯仰視線角 、方位視線角
、方位視線角 ,目標類型
,目標類型 和目標幾何尺寸(長寬)
和目標幾何尺寸(長寬) 和信號強度
和信號強度 。
。
(3)導航信息
導航信息指節點N生成探測信息 時刻節點位置和速度,記為
時刻節點位置和速度,記為 。
。
2.3.3.3投票信息
投票信息是指蜂群中記賬節點進行區塊鏈信息寫入的認證記錄。記賬節點將融合信息廣播至蜂群后,獲取各節點的投票,過2/3通過后則確認信息入鏈。投票信息以節點為存儲對象,包含投票節點、投票結果、投票內容,同時為便于合約層數據調用,投票信息還包含投票節點的導航信息。
# #2.4 共識層# # ? ?2.4.1 共識過程? ?
導彈蜂群區塊鏈共識機制主要包括競爭機制和驗證機制,競爭機制用于選出記帳節點,即臨時領彈,進行目標信息融合和任務分配,驗證機制用于對臨時領彈身份和傳輸信息正確性進行確認。基于兩種機制,可實現目標信息融合的最大共識性和共識結果的記錄防篡改。本文提出基于權益證明POS(Proofof Stake)的“隨機指派機制RPOS(RandomProof of Stake)+實用拜占庭容錯PBFT(PracticalByzantine FaultTolerance)”的混合共識算法。RPOS算法主要是解決共識算法的速度問題,根據節點編號通過隨機算法產生具有記賬權的節點。而PBFT算法主要解決惡意節點剔除問題[7]。其基本過程是:在即時戰場環境下,最先探測到目標的節點,發起記賬,各節點對目標關鍵信息(如類型、位置、速度、航向、參數等)進行投票,形成共識后,再根據概率隨機算法選出記賬節點,即臨時領彈。記賬節點按照智能合約融合形成目標屬性和目標航跡信息后,發起對信息融合結果的投票,根據投票數形成最終的目標信息融合結果。具體如下:
步驟1:信息更新請求
當節點i首先探測到目標信息后,全網廣播,廣播信息包括:節點地址、信息探測時間戳、節點探測信息 、節點導航信息
、節點導航信息 ;同時采用隨機算法,選出集群中的某一節點j作為記賬節點,并全網廣播。
;同時采用隨機算法,選出集群中的某一節點j作為記賬節點,并全網廣播。
步驟2:信息融合
節點j收到節點i的任命后,根據鏈上最新的目標融合信息 、節點i探測信息、自身探測到的目標信息
、節點i探測信息、自身探測到的目標信息 和導航信息
和導航信息 ,按照智能合約進行融合得到新的目標融合信息
,按照智能合約進行融合得到新的目標融合信息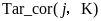 。
。
步驟3:發起投票
節點j將目標融合信息 廣播至蜂群中其他節點,廣播信息包節點j和節點i的探測信息與導航信息,最新目標融合信息,表達為
廣播至蜂群中其他節點,廣播信息包節點j和節點i的探測信息與導航信息,最新目標融合信息,表達為
 (3)
(3)
步驟4:進行投票
導彈蜂群各節點收到投票信息后,將臨時領彈融合的信息與自身探測和融合結果進行比對,實現對目標融合信息進行可信性校驗,一致則通過校驗給與認證,隨即將認證信息進行全網廣播。投票信息包括投票節點、投票結果和擬投票信息,表達為
 ? ? ? ? ? ? ? ? ? ? ?(5)
? ? ? ? ? ? ? ? ? ? ?(5)
步驟5:區塊鏈更新
蜂群各節點對收到的投票信息進行校驗,當且僅當節點j獲取的認同票數大于2/3時,節點j所發起的目標融合結果有效,然后節點j將目標融合信息Tar_cor(j,K)以及相應的單點探測信息 、
、 寫入區塊鏈,更新目標信息。
寫入區塊鏈,更新目標信息。
? ?2.4.2 競爭機制? ?
競爭機制是選取記賬節點完成信息融合的過程,信息一致性要求競爭結果唯一性。但是,理論上存在多個探測節點同時探測到目標,也就是存在同時選出多個記賬節點j情況,此時會產生類似比特幣區塊鏈雙花問題。為避免此情況,采用基于信息熵的權益證明選出唯一記賬節點。各節點從多個候選節點集合{j}中投票選出目標識別信息熵最大的節點為最終記賬節點。記目標類別信息為 ,其熵值表示為:
,其熵值表示為:
 ? ? ? ? ?(6)
? ? ? ? ?(6)
信息熵代表確定性的量度,熵越大表明節點所融合到的確定信息越多。基于最大熵的投票原則,保證蜂群各節競爭結果唯一性。
? ?2.4.3 校驗機制? ?
校驗機制是確保信息可靠的方法,包括信息來源校驗和信息內容校驗。
(1)信息來源校驗
信息來源校驗體現在投票和計票過程:
(a)投票過程。投票信息 進行公鑰解密后,與節點j身份認證信息一致。
進行公鑰解密后,與節點j身份認證信息一致。
(b)計票過程。各節點確認記賬節點j發起的投票結果有效:一是各節點的投票結果 ,與其投票內容是一致的,二是投票節點
,與其投票內容是一致的,二是投票節點 的身份正確。
的身份正確。
(2)信息內容校驗
信息內容的校驗則包括對融合計算的校驗、目標航跡校驗和目標屬性校驗。融合計算校驗是指各節點使用相同的信息融合算法完成對探測信息、導航信息的校驗并與融合信息對比,一致則信息正確。目標航跡校驗是指通過航跡關聯,實現不同傳感器所探測航跡的關聯。目標屬性校驗,則是各節點通過融合信息中目標分類概率與自身探測的分類概率進行互斥性排除,排除后即可確認。
# #2.5 合約層# #
合約層封裝了以算法和腳本形式定義的一系列約定,合約參與方可以通過相應的機制,執行這些約定的相關協議,從而自動實現區塊鏈的業務邏輯。導彈蜂群區塊鏈合約層的主要功能,一是進行多節點、多傳感器探測信息的自動融合,二是按照毀傷要求和攻擊模式約束,進行制導律協同量的計算與分配。由此實現導彈蜂群在復雜戰場環境下的自主智能交戰。
? ?2.5.1 多節點、多傳感器目標信息融合? ?
記賬節點(領彈)選出后,自動觸發智能合約進行信息融合。協同探測的任務中,待融合信息主要是指不同體制傳感器探測到感興趣區域內的目標信息,見式(3)。目標信息融合采用點跡級融合,融合時綜合區塊鏈上最新融合結果 、新探測的目標信息
、新探測的目標信息 和節點的導航信息Nav(N,K),融合功能相當于分層目標分類器。目標信息融合可通過信息圖形式清晰表達信息流和信息結構間的變遷。如圖5所示。
和節點的導航信息Nav(N,K),融合功能相當于分層目標分類器。目標信息融合可通過信息圖形式清晰表達信息流和信息結構間的變遷。如圖5所示。
圖5目標信息融合示意圖
融合信息包括目標位置信息(P)、速度信息(V)以及目標類型、幾何信息,表達形式為:
 (7)
(7)
記融合符號為 ,則有:
,則有:
 (8)
(8)
對于目標位置、速度等連續動態量,采用基于卡爾曼濾波的協方差估計的融合算法。對于目標類型、幾何尺寸等靜態識別量,具有非確定性特點,采用基于貝葉斯概率估計的融合算法。以目標識別為例,方法如下:
 (9)
(9)
其中,

為區塊鏈上最新融合信息中的目標分類后驗概率, 為累積的探測信息,
為累積的探測信息, 為節點最新探測信息中的目標分類后驗概率,
為節點最新探測信息中的目標分類后驗概率, 為先驗概率。
為先驗概率。
? ?2.5.2 制導律協同量的計算與分配? ?
智能合約的分布式部署,使蜂群成為一個分布式控制系統,蜂群中各節點部署相同的制導律。單個節點的智能合約部署原理如圖6。
圖6單個節點的協同制導智能合約部署原理
導彈蜂群在完成對探測目標共識判斷,融合結果上鏈事件自動觸發智能合約,根據全向攻擊或攻擊時間約束等模式,調用合約規則,自動生成各節點的制導律協同量計算和分配,協同各節點完成飽和打擊任務。智能合約數據流向示意見圖7。
典型的智能合約采用可編程技術定義自動化運行腳本。蜂群協同制導的合約層引入人工智能算法,能夠讓合約具有一定的智能進化能力。合約規則以對抗效果和毀傷要求為目標,基于各導彈能量約束,合約腳本調用BP神經網絡和異質多種群蟻群算法完成制導律協同量實時自動指派。BP神經網絡的參數和結構在地面訓練好后發射前寫入智能合約,如圖8。
導彈蜂群協同制導規劃的目標函數為:
 (10)
(10)
式中 為規劃目標數量,
為規劃目標數量, 、
、 分別為時間協調、攻擊角度不同造成的毀傷效果;
分別為時間協調、攻擊角度不同造成的毀傷效果; 為任意兩枚導彈擊中目標的時間間隔,
為任意兩枚導彈擊中目標的時間間隔, 表示區間長度,
表示區間長度, 為目標類型。
為目標類型。
規劃約束為導彈數量、目標數量、可達性和導彈能量,見式(11)。
(11)
上式表示 子集群所分配的目標
子集群所分配的目標 和任務
和任務 均應當滿足Vi子集群的可攻擊域。
均應當滿足Vi子集群的可攻擊域。
圖7智能合約與區塊鏈交互
圖8三層神經網絡
各節點收到智能合約的協同量后按如下制導律進行全向攻擊和同時間到達目標導引。導彈節點i的制導律為:
 (12)
(12)
式中 、
、 、
、 分別為比例導引加速度指令、攻擊方位協調指令、時間協調指令。其中:
分別為比例導引加速度指令、攻擊方位協調指令、時間協調指令。其中:
 ? ? ? ? ?(13)
? ? ? ? ?(13)
其中 、
、 分別為速度方位角和終端入射方位角要求,
分別為速度方位角和終端入射方位角要求, 、
、 為制導系數,
為制導系數, 為導彈i的剩余估計飛行時間,為二元函數,反映通信網絡的連接情況。
為導彈i的剩余估計飛行時間,為二元函數,反映通信網絡的連接情況。 ,在t時刻,當節點j至節點在通信連接時,
,在t時刻,當節點j至節點在通信連接時, ,否則取
,否則取 ?。
?。
# #2.6 應用層# #
導彈蜂群協同制導區塊鏈應用面向協同探測、協同決策、協同干擾、協同突防和協同攻擊等蜂群協同各環節。區塊鏈運行于各導彈的彈載計算機上,與導引頭、彈載計算機和地面規劃系統存在信息交互,應用層有對應的標準化總線通信接口和軟件接口。同時,針對導彈節點入群和離隊管理,應用層具有身份認證端口。
3 效能預估 # #3.1 區塊鏈性能分析# #
針對區塊鏈技術中存在的蒙代爾不可能三角,即三元悖論,對本方案的安全性、去中心化和實時性進行仿真分析。
(1)安全性
區塊鏈引入了非對稱加密算法后,運行的主要風險是記賬人作弊的風險,在比特幣中被稱為雙花問題。假定惡意節點需要產生Z個區塊,才可使得偽造的區塊鏈成為最長鏈,同時假設惡意節點偽造區塊鏈的增長服從泊松分布,即泊松分布期望值為:
那么惡意節點成功篡改數據的概率為:
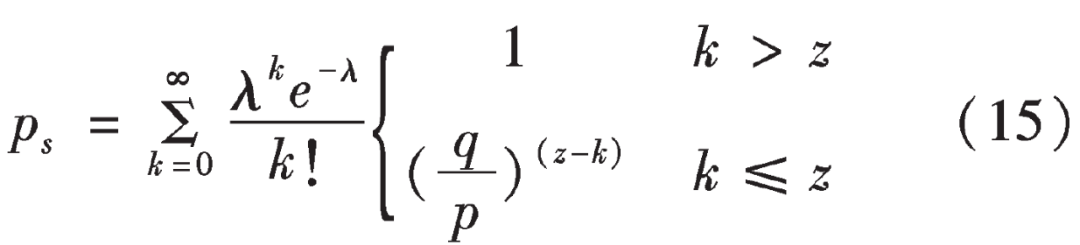
式中,q——可信節點權益; p——惡意節點權益。
上式可見,對于惡意節點持有權益小于可信節點的網絡,惡意節點產生的分叉存活概率指數衰減。惡意節點偽造長度為Z的區塊鏈的概率仿真結果見圖4-1所示。由圖可見,隨著偽造區塊鏈長度增長,惡意節點成功概率指數衰減;隨著節點數增加,惡意節點偽造區塊鏈成功難度加大。當蜂群節點數大于10,惡意節點偽造成功5個以上區塊的概率小于5%。
(2)去中心化
共識機制設計時,通過RPOS+PBFT共識算法選出記賬主節點,每個節點均擁有概率均衡的記賬權。基尼系數被廣泛應用于評估社會貧富分化問題,引入基尼系數衡量區塊鏈去中心化程度,評估各節點所占權益比重的均衡程度。基尼系數越小,節點權益分配越平均。基尼系數為:
式中 N為記賬候選人總數;為記賬候選人持有權益的平均值;為記賬候選人j所持有的權益。
基尼系數的仿真結果見圖10。圖中表明,本方案的共識機制實現了各節點競爭記賬的權益均衡,基尼系數小于一般要求的最大值0.3,沒有出現某個節點占較重權益的情況。
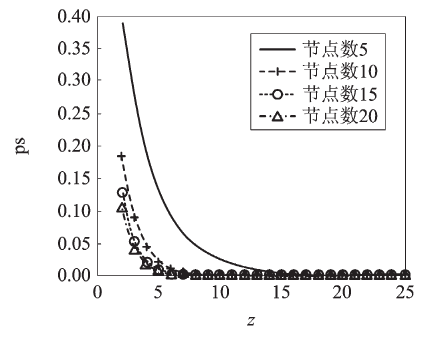
圖9惡意節點篡改概率
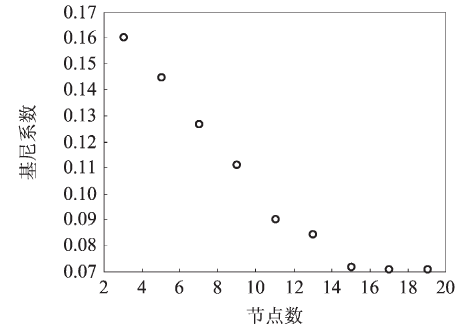
圖10基尼數隨節點數變化
(3)實時性
由于網絡拓撲關系對區塊傳播時間影響較大,較難得到傳播時間的解析式,通過仿真可估算出區塊傳播全網所需時間。區塊傳播全網時間包括記賬節點向節點發送區塊所需時問、其他節點驗證時間和記賬節點全網廣播時間,如下式所示:

式中,S為區塊的容量;B為網絡帶寬;k為驗證所需時間的統計系數。 為記賬結果傳播所需時間。
為記賬結果傳播所需時間。
區塊在網絡中傳播所需要時間仿真見圖11。從仿真可知,區塊傳播時間受節點數和區塊大小影響,通過進行區塊大小和節點數平衡設計,其傳播時間可以滿足蜂群協同的制導需求。
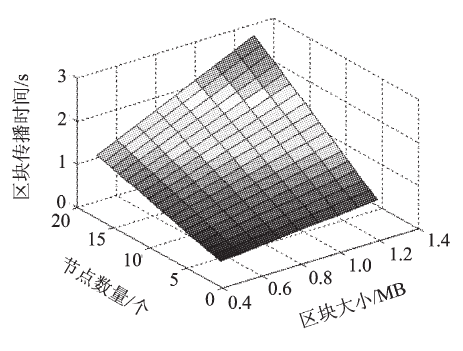
圖11區塊傳播時間
由上述初步仿真結果可見,導彈蜂群區塊鏈的設計,突出了非信任環境下的可信協同環境構建,其去中心化、實時性與安全性可實現系統指標匹配,能夠適應導彈蜂群作戰的要求。
##3.2 典型任務仿真##
以5枚導彈協同攻擊目標組合為仿真場景,目標組合包含一個真目標1#和2個假目標(2#、3#)。探測信息融合結果如圖12所示,不同節點對目標1#的觀測結果受相對位置、視線角影響存在誤差如圖(a)、(b)所示,圖中“1”代表識別為真實目標,“0”代表識別為假目標。共識后蜂群排除單點探測信息誤差,融合后結果見圖(c),目標信息融合提高了目標識別正確性;基于融合結果分配的各導彈攻擊目標見圖(d),圖中各導彈節點8s后均向真實目標1#目標導引。
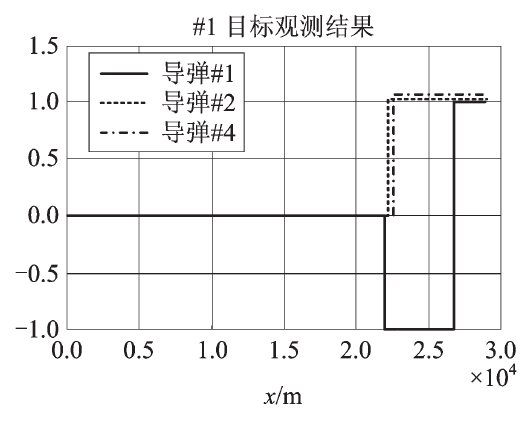
(a)1、2、4#導彈觀測1#目標結果
(b)1、3、5#導彈觀測1#目標結果
(c)共識融合后結果
(d)各導彈攻擊目標分配
圖12導彈協同探測結果
按照智能合約分配的同時到達和全向攻擊的制導律協同量,各節點以較好精度滿足約束條件要求。表1給出了同時到達任務的各節點攻擊時間統計結果,各節點到達時間均控制在28s時刻,最大偏差不超過1s。全向攻擊任務各節點飛行軌跡見圖12,蜂群對目標實現了多角度攻擊,攻擊角度覆蓋-72.28~73.27°。
表1各節點飛行時間統計

(a)多方位協同飛行軌跡
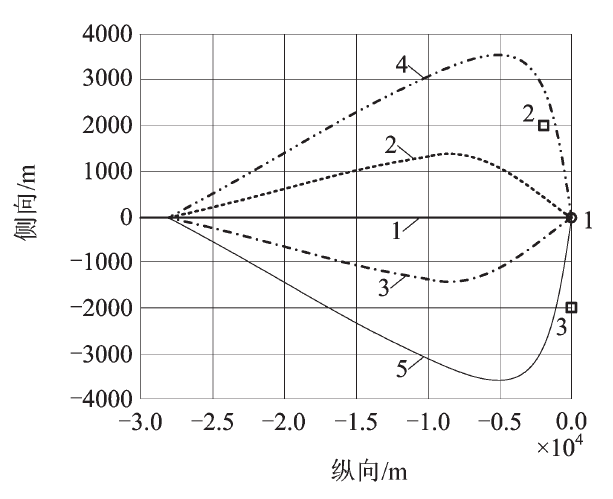
(b)目標攻擊角度曲線
圖13多方位角度協同攻擊仿真結果
典型場景仿真結果表明,蜂群中各節點通過共識算法,克服了單點單手段探測的缺陷,有效提升了蜂群目標識別的準確性。基于區塊鏈的協同機制,按照智能合約規則分配制導律協同量,各節點依靠分布式的協同制導律,可以順利地完成協同攻擊任務。
4 結束語
區塊鏈基于云計算、無中心自組網、密碼學、人工智能等多種領域的新技術進行集成創新,創造了新的組織形式、新的決策機制和新的計算范式,可以預見“區塊鏈+”已經成為繼“互聯網+”、“人工智能+”后,人類經濟、社會、軍事領域中一種新的發展趨勢。通過本文的分析和仿真可以看到,區塊鏈技術對蜂群自主作戰系統的需求具有很強的契合性,對這類系統作戰效能的提升在技術上的優勢顯而易見。下一步,需要在異構節點區塊鏈和多區塊鏈跨鏈應用上進一步研究探索,以使基于區塊鏈的軍事系統更具適應性和實戰性。
審核編輯 :李倩
-
智能化
+關注
關注
15文章
5119瀏覽量
57166 -
導彈
+關注
關注
2文章
75瀏覽量
20705 -
區塊鏈
+關注
關注
112文章
15565瀏覽量
108246
原文標題:一種基于區塊鏈的導彈蜂群協同制導機制
文章出處:【微信號:CloudBrain-TT,微信公眾號:云腦智庫】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
蜂群智聯?破界而生——蜂群自組網無線客戶端重塑工業通信新范式
虛擬電廠跨境協同:EMS光儲協同系統如何用1秒響應替代歐洲人工調度?
PanDao:光學設計中的光學加工鏈建模
解碼時間的隱形指揮棒:NTP校時服務器
dap協議的基本概念 dap協議在區塊鏈中的應用
YOGO ROBO智能機器人助力區塊鏈行業發展
智慧能源管理系統:區塊鏈技術在能源交易中的應用


華為云、上海鈞達數科 發布區塊鏈數據要素聯合解決方案
一種完全分布式的點線協同視覺慣性導航系統

物聯網系統中的Lora是什么?一種Lora模組的使用推薦。


探索無限可能:華為云區塊鏈 +X,創新融合新篇章






 工商網監
工商網監

評論