 MAX14912/MAX14913八通道數字輸出驅動器的特性及應用
MAX14912/MAX14913八通道數字輸出驅動器的特性及應用
本應用筆記解釋了MAX14912/MAX14913八通道數字輸出驅動器的主要特性,以及如何在工業和樓宇自動化應用中使用它們。
介紹
數字輸出驅動器廣泛用于過程控制(PLC系統)和樓宇自動化的工業應用。它們還可用于使用 24V DC 系統進行控制的任何地方,例如電機控制、機器人和機械自動化。
乍一看,數字輸出驅動器是一個簡單的器件,只有兩種輸出狀態:ON或OFF。經過仔細觀察,設計人員成功地取代了機械開關和繼電器,為工程師提供了許多優勢,如穩健運行、低功耗、簡單、更小尺寸、靈活性和可編程性,以構建自動化、容錯控制系統。
Maxim的數字輸出驅動器具有高達200kHz的開關速率、快速安全的電感負載退磁、開路負載、低壓和欠壓檢測、過流和過熱保護、看門狗定時器和SPI錯誤檢測。它們可承受高達 60V 的功率尖峰,不受 ±1kV 浪涌脈沖和高達 12kV ESD 沖擊的影響,工作溫度范圍為 -40°C 至 +125°C。
在本應用筆記中,我們將討論如何有效利用MAX14912/MAX14913輸出驅動器的不同特性。為此,我們研究了系統設計人員必須做出的決策,并研究了MAX14912/MAX14913提供的利弊和優勢。
確定系統運行條件
高端 (HS) 還是推拉 (PP)?
通常推挽操作用于高速通信,其中信號波形應具有鋒利的邊緣。這種模式的缺點是輸出始終處于工作狀態,無論是高電平還是低電平,并且不能是三態或具有高阻抗,除非使用全局EN引腳。
相反,高端操作允許工程師將輸出置于高阻抗狀態,但信號波形在很大程度上取決于負載阻抗。輸出也可以并聯連接,允許在高邊模式下高達 9.6A 的更大負載。
因此,操作模式的選擇取決于特定的應用。
電源要求
MAX14912/MAX14913支持12V至36V的寬范圍電源,可用于廣泛的應用,甚至適用于電源要求較低且容限較高的系統。這保證了系統設計的穩健性和靈活性。
集成的 5V DC-DC 轉換器消除了額外的電源軌,最大限度地減少了外部組件的數量,并提高了系統效率。系統中的其他器件可以由該 5V 直流電源供電,可為外部電路提供超過 100mA 的電流。
系統集成
數字輸出驅動器是低壓MCU/FPGA與相對高壓(12V至36V)外圍設備(如執行器、電機、燈、繼電器、LED等)之間的接口。它們對電壓和電流尖峰、電感或容性負載以及磁干擾和靜電放電具有很高的抗擾度。
此外,MAX14912/MAX14913提供廣泛的診斷功能,包括熱關斷、開路檢測、低電源和欠壓檢測以及過壓和過流保護。4 × 4 LED 驅動器交叉矩陣允許每個通道指示輸出狀態和故障條件。
數字接口
MAX14912和MAX14913支持兩個接口;并行和串行。系統設計人員可以靈活地使用并行或串行接口來控制操作,也可以同時使用這兩個接口。為了理解接口,我們首先回顧一些全局配置引腳。
全局配置引腳
EN – 將此引腳驅動為高電平,使器件能夠正常工作;將該引腳驅動為低電平將禁用任何輸出操作,即使所有輸出均為高阻抗。
SRIAL – 將該引腳驅動至高電平可實現串行 (SPI) 操作;將該引腳驅動為低電平可實現并聯操作。
PUSHPUL – 將此引腳驅動到高處,可實現推挽式操作模式;將該引腳驅動為低電平或保持未連接狀態會導致所有輸出引腳在高端模式下工作。
FLTR – 當此引腳設置為高電平時,所有并行邏輯輸入和CS引腳上的毛刺濾波均使能。
并行接口
并行接口是基于引腳的簡單接口,用于控制驅動器輸出。如果 SRIAL 引腳接地(SRIAL = 低電平),則通過并行接口控制器件。OUT_引腳的狀態由相應的IN_引腳和全局配置引腳的狀態控制:PUSHPL、FLTR 和 EN。在并行模式下控制MAX14912/MAX14913至少需要9個GPIO引腳:控制8個輸入引腳IN_和PUSHPL引腳。FLTR和EN引腳可以始終保持高電平。引腳設置匯總于表1中。
| 普什普爾 | 驅動程序模式 | 在_ | OUT_狀態 |
|---|---|---|---|
| 0 | 高邊 | 0 | 高邊驅動器關斷/高阻抗 |
| 0 | 高邊 | 1 | 高邊驅動器導通/輸出高電平 |
| 1 | 推挽式的 | 0 | 輸出低 |
| 1 | 推挽式的 | 1 | 輸出高 |
注意:MAX14913不允許在并行模式下進行串行配置,而MAX14912可以通過串行接口進行配置,即使SRIAL為低電平。除寄存器 0 外,所有寄存器都可以在此模式下訪問(請參閱下面的串行接口部分)。
通過串行接口進行配置的優先級高于 PUSHPL 引腳設置。邏輯電平0(低)或1(高)取決于VL輸入,VL輸入的有效范圍為1.6V至5.5V。 并行模式的缺點是缺乏診斷信息。
串行接口
當SRIAL引腳被驅動到VL電平(SRIAL =高電平)時,串行SPI接口使能。在串行模式下,所有輸出引腳均由內部寄存器設置和輸入引腳控制。寄存器可通過串行接口引腳訪問:CS、CLK、SDI 和 SDO。詳情請參考MAX14912/MAX14913數據資料中的串行接口部分。
循環冗余校驗 (CRC)、看門狗和濾波等某些功能僅由 CRC/IN3、WDEN/IN5 和 FLTR 引腳上的輸入邏輯控制,而開路負載檢測和輸出配置則由 OL/IN1 和 PUSHPL 引腳上的輸入邏輯或通過寄存器設置控制。
此外,CMND/IN2、CNFG/IN7 和 S16/IN8 的設置總結在表 2 中。
| 針 | 結果 | |||||||
|---|---|---|---|---|---|---|---|---|
| SPI 模式 | 斯里亞爾 | CMND/IN2 | CNFG/IN7 | S16/IN8 | 位 | 空間數據指數 | 性別歧視條例 | 筆記 |
 |
1 | 0 | 1 | 0 | 8 | 每通道故障 | 由SPI設置。故障是故障的實時狀態(驅動程序關閉或打開負載) | |
| 1 | 16 | 每個通道的故障和電平 | ||||||
| 1 | 0 | 1 | 0 | 8 | 每通道故障 | OUT 級別不變 | ||
| 1 | 16 | 每個通道的故障和電平 | ||||||
 |
1 | 1 | X | X | 16 | 上一個命令輸出 | OUT 級別可能會也可能不會根據命令而更改 | |
| 0 | X | X | X | 16 | 上一個命令輸出 | 輸出由 INx 引腳設置。MAX14912允許SPI配置。MAX14913不允許SPI配置。 | ||
直接模式
在直接SPI模式下,不需要命令字節。高字節控制輸出電平,低字節控制 16 位模式下的輸出配置。當 CNFG/IN7 和 S16/IN8 設置為低電平時,只能訪問 Reg. 0。當 CNFG/IN7 和 S16/IN8 設置為高電平時,只能訪問 Reg. 1 和 Reg. 2。
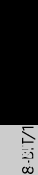
在直接模式寫入期間,SDO引腳上提供故障(F)和輸出電平(L)診斷(請參閱圖1和表3)。
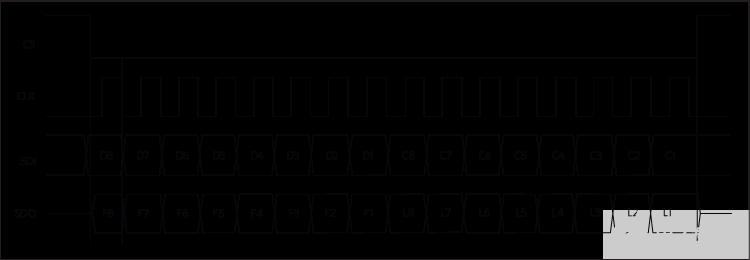
圖1.16 位直接 SPI 模式下的 SPI 周期。
| 位 | 位值 | CNFG/IN7 | 定義 |
| D_ | 0 | 低 |
在高邊模式下:HS 關閉,LS 關閉 在推挽模式下:HS 關閉 ,LS 打開 |
| 1 | 低 | 低 HS 開啟,LS 關閉 | |
| C_ | 0 | 低 | 高邊模式 |
| 1 | 低 | 推挽模式 | |
| D_C- | 00 | 高 | 高邊模式;由 OL/IN1 引腳定義的開路負載檢測 |
| 01 | 高 | 帶負載開路檢測的高邊模式 | |
| 10 | 高 | 推挽模式 | |
| 11 | 高 | 未使用 | |
| 00 | 低 | 高邊模式:HS 關閉,LS 關閉 | |
| 10 | 低 | 高邊模式:HS 開啟,LS 關閉 | |
| 01 | 低 | 推挽模式:HS 關閉,LS 打開 | |
| 11 | 低 | 推挽模式:HS 開啟,LS 關閉 | |
| F_ | 0 | X | 無過錯 |
| 1 | X | 故障狀態(熱保護或開路負載) | |
| L_ | 0 | 0 | 輸出電平 < 7V |
| 1 | 0 | 輸出電平 > 7V | |
| 0 | 1 | 慢速模式已禁用 | |
| 1 | 1 | 慢速模式已禁用 |
綜上所述,
當 S16/IN8 = 低電平且 CNFG/IN7 = 低電平時,一個字節的串行數據控制OUT_狀態;當 S16/IN8 = 低電平且 CNFG/IN7 = 高電平時,一個字節的串行數據控制輸出模式:高邊或推挽。
當 S16/IN8 = 高電平和 CNFG/IN7 = 低電平時,兩個字節的串行數據控制OUT_狀態和輸出模式配置:高端或推挽。
當 S16/IN8 = 高電平且 CNFG/IN7 = 高電平時,第一個字節設置輸出配置(高邊/推挽),第二個字節啟用/禁用負載開路檢測。
建議先設置配置寄存器,然后再更新輸出電平。
注意:返回的F_(故障)和L_(級別)信息適用于上一個編寫的命令。寫入兩次以獲得實時故障和電平診斷。當驅動器處于高邊模式并啟用負載開路檢測時,空載的OUT_引腳被75μA電流拉高至VDD電平。在這種情況下,將確定故障條件。
命令模式
在命令模式下,所有功能和增強診斷均可通過SPI接口獲得。 要設置命令模式,CNMD/IN2引腳必須設置為高電平。S16/IN8 和 CNFG/IN7 引腳的輸入將被忽略。該命令包含命令字節,后跟數據字節。總共有六種可用的命令類型(有關命令說明,請參閱表 4,有關寄存器映射,請參閱表 5)。有關更多信息,請參閱數據手冊。
| 命令# | 功能 | 地 | 做 | 評論 | |||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 命令 | 數據 | 在下一個周期有效 | |||||||||||||||||||||||||||||||||||||||
| 0 |
|
||||||||||||||||||||||||||||||||||||||||
| 注意: 所有故障寄存器只能通過在任何命令周期中設置 Z = 1 來清除。 | |||||||||||||||||||||||||||||||||||||||||
| 注冊 | R/W | 目的 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|
| 0 | R/W | 驅動程序設置 | HNY | IN7 | IN6 | HNT | IN4 | IN3 | HNS | IN2 |
| 1 | R/W | 推挽式/高邊配置 | PP8 | PP7 | PP6 | PP5 | PP4 | PP3 | PP2 | PP1 |
| 2 | R/W | R/W 開路負載檢測使能 | OL_EN8 | OL_EN7 | OL_EN6 | OL_EN5 | OL_EN4 | OL_EN3 | OL_EN2 | OL_EN1 |
| 3 | R/W | 看門狗配置。和通道并聯 | X | X | X | 短路脈沖關閉 | Short-circuit Pulse OFF | joinUP | joinDW | WD1 |
| 4 | R | 每通道開負載條件 | 藍隊 | 布萊茲 | OL6 | OL5 | OL4 | OL3 | OL2 | OL1 |
| 5 | R | 每通道熱關斷 | THSD8 | THSD7 | THSD6 | THSD5 | THSD4 | THSD3 | THSD2 | THSD1 |
| 6 | R | 全局故障 | WD故障 | CRC故障 |
直流直流 電流限制 |
8CLKmult Error | THSDglob | 5V 紫外線 | 電壓輸出 烏洛 | 電壓輸出 警告 |
| 7 | R | OUT 過壓檢測或慢速模式 | OV8 | OV7 | OV6 | OV5 | OV4 | OV3 | OV2 | OV1 |
通信錯誤(CRC 檢測)
循環冗余校驗 (CRC) 是一種錯誤檢測功能,可提高通信可靠性并避免意外執行意外命令。最初,SPI協議沒有任何錯誤檢測功能,串行數據在惡劣的工業環境中可能會損壞。啟用CRC檢測后(SRIAL=高電平,CRC/IN3 =高電平),來自SPI主機的所有命令后必須后跟一個帶有7位CRC代碼的附加字節,如圖2所示。
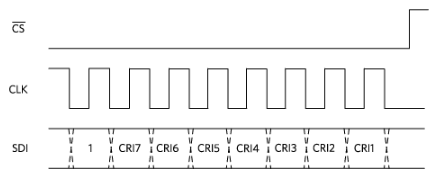
圖2.微控制器的SDI檢查字節。
7 位 CRC 碼,也稱為 CRC 幀校驗序列 (FCS),是根據生成器多項式 (x7+ x5+ x4+ x2+ x + 1)。MAX14900E中也使用了相同的多項式。有關CRC計算的C代碼實現的更多信息和示例,請參考應用筆記6002:“MAX14900E八通道高速工業開關的CRC編程”。
安裝MAX14912或MAX14913時,器件檢查接收到的數據是否有位損壞,如果未檢測到錯誤,則執行命令。如果從微控制器接收的CRC代碼與計算出的CRC不匹配,則忽略該命令,并在寄存器6中設置CRC誤差位6。CRC錯誤在下一個SPI幀上報告給主機微控制器。
CRC計算器內置于MAX14912EVKIT軟件中。如果CRC/IN3引腳被驅動為高電平,CRC字節會自動計算并添加到SPI命令幀中。如果從“選項”菜單中選擇了“顯示狀態日志”選項,則可以在“狀態日志”窗口中看到它。
圖3.數字輸出驅動器 GUI 中的 CRC 計算。
CRC代碼可以在CRC計算器彈出窗口中手動計算。轉到“幫助”菜單,然后單擊CRC計算器以顯示它。鍵入字節 1 和字節 2 的值,然后單擊計算 CRC 按鈕,如圖 4 所示。
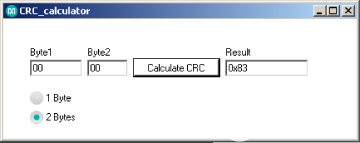
圖4.CRC計算器彈出窗口。
多個IC的菊花鏈
MAX14912和MAX14913允許以菊花鏈方式連接多個器件,并通過單個命令模式同時控制/監視同一SPI總線上的所有器件。所有設備都使用通用的CLK和CS信號;鏈中第一個器件的SDI引腳連接到主器件的MOSI引腳,最后一個器件的SDO連接到主器件的MISO引腳。第一個器件的數據輸出(SDO)連接到第二個器件的數據輸入(SDI),如圖5所示。其他設備可以以類似的方式菊花鏈連接。
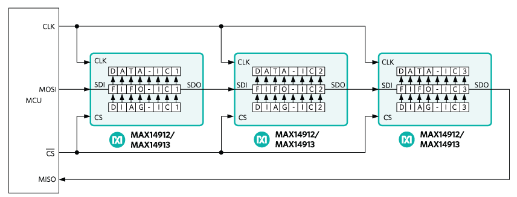
圖5.菊花鏈連接。
MAX14912/MAX14913EVKIT允許兩個評估板以菊花鏈方式連接,但相同的命令結構適用于三個或更多器件。
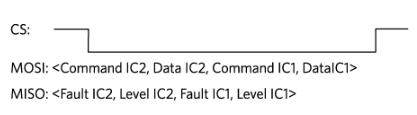
例如,16 位命令模式下兩個菊花鏈設備的命令幀。
評估板應堆疊,使以下器件的J24接頭(EVKIT #2)連接到評估板#1的J23,如圖6所示。USB電纜或外部主站應連接至評估板#1。此外,EVKIT #1的J26跳線必須位于位置2至3,但EVKIT #2的J26跳線應位于位置1至2。評估板#2的J9、J5、J4、J22、J10、J6、J12、JMP1、J11、JMP2、J8和J3上的跳線必須手動設置為與GUI中相同的位置。更多信息請參考MAX14912/MAX14913數據資料和原理圖。
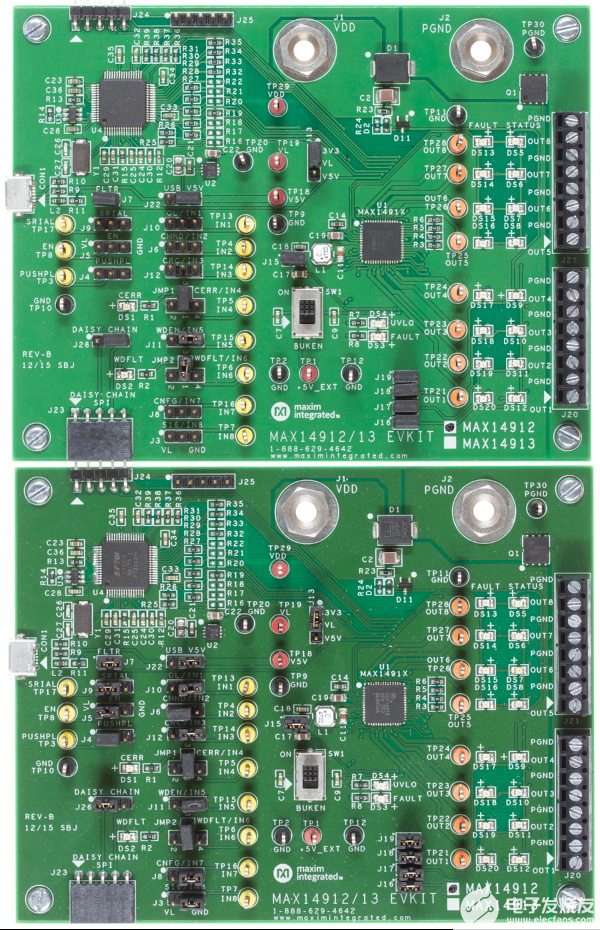
圖6.菊花鏈式MAX14912評估板
應如圖7所示選擇菊花鏈盒。
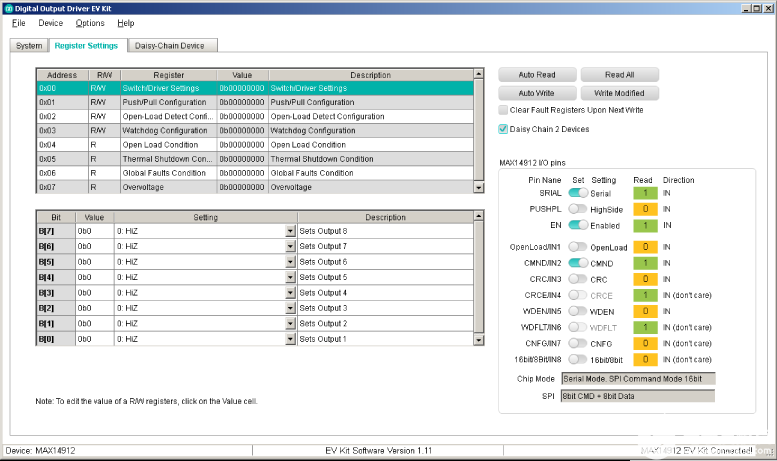
圖7.菊花鏈操作。
菊花鏈的能力不僅限于擴展輸出通道的數量,還允許與數字輸出驅動器和數字輸入接收器組合構建更復雜的系統,例如八通道數字輸入轉換器/串行器系列MAX31910/MAX31913。
驅動感性負載
MAX14912和MAX14913具有感性負載的安全退磁(SafeDemag),可防止在高端模式下關斷感性負載時產生的反沖電壓損壞芯片。如果需要驅動大電感,例如執行器、繼電器或電機,當電流從芯片流經負載流向地面時,感性負載中會存儲大量能量。當電流因高端開關關閉而終止時,該能量在OUT_引腳上轉換為負尖峰。尖峰由內部齊納二極管箝位至(VDD- 56V)。例如,如果 VDD= 24V,則OUT_引腳相對于地箝位至-32V。在這種情況下,存儲在感性負載中的能量消散得更快,因為能量與|成正比V x I|.然而,耗散更大的能量需要更多的時間。在此期間,芯片的溫度可以達到安全閾值。為了防止危險的熱失控,低側開關被激活,允許更少的能量耗散,直到內部溫度達到安全區域。
結論
Maxim的高集成度數字輸出驅動器系列為系統設計人員提供了極大的魯棒性、靈活性和特性。它們是為任何工業自動化和通信應用構建高度集成和高效控制系統的關鍵要素。
審核編輯:郭婷
-
繼電器
+關注
關注
132文章
5333瀏覽量
148811 -
驅動器
+關注
關注
52文章
8226瀏覽量
146253 -
電機
+關注
關注
142文章
9001瀏覽量
145340
發布評論請先 登錄
相關推薦
數字輸出驅動器的關鍵特性和挑戰
【每日推薦】用了這么久放大器,特性及阻抗你都了解嗎?
八通道高壓發送器接收器開關MAX4937電子資料
八通道超聲前端與CW多普勒混頻器MAX2078電子資料
MAX2077中文資料,八通道超聲接收器
MAX2078 八通道超聲前端,提供CW多普勒混頻器
MAX1436B 八通道、12位模數轉換器(ADC)







 工商網監
工商網監
評論