") 振弦采集模塊配置工具VMTool的常見功能
振弦采集模塊配置工具VMTool的常見功能
振弦采集模塊配置工具VMTool的常見功能
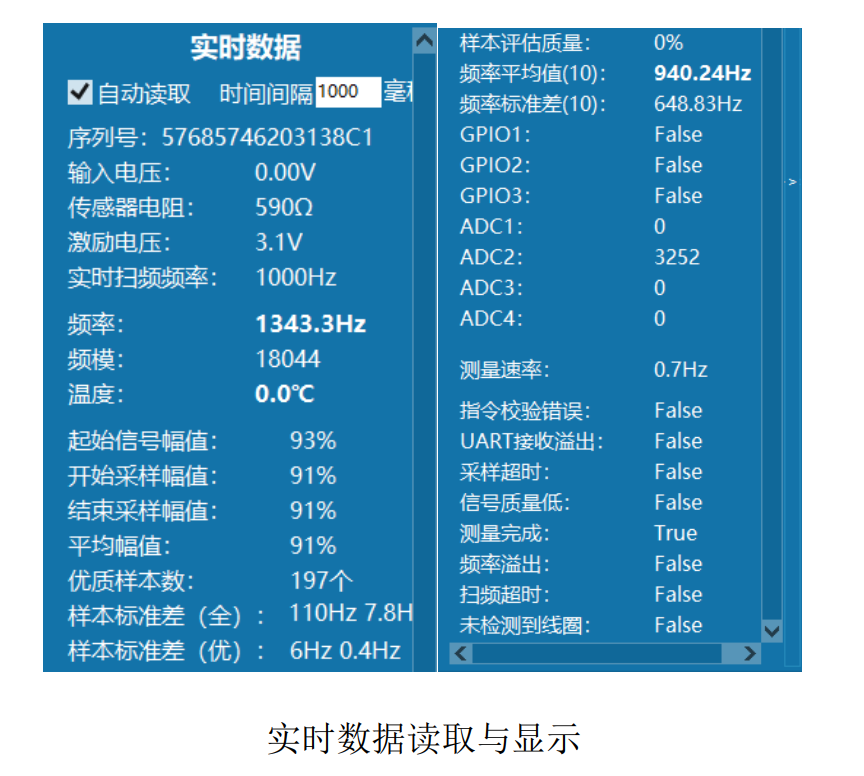
一、實(shí)時(shí)數(shù)據(jù)讀取
當(dāng) VMTool 與模塊為連接狀態(tài)時(shí)( 4.3.1 模塊的連接與斷開), 勾選實(shí)時(shí)數(shù)據(jù)區(qū)的【 自動(dòng)讀取】 復(fù)選框, VMTool 開始自動(dòng)向模塊發(fā)送實(shí)時(shí)數(shù)據(jù)讀取指令, 修改【 時(shí)間間隔】 文本框內(nèi)的數(shù)值可改變相鄰兩條讀取指令的時(shí)間間隔, 單位為毫秒。 自動(dòng)發(fā)送讀取指令后, VMTool 等待模塊返回實(shí)時(shí)數(shù)據(jù), 直到模塊返回了正確的實(shí)時(shí)數(shù)據(jù)后才會(huì)啟動(dòng)下次指令發(fā)送。
振弦采集模塊配置工具VMTool
實(shí)時(shí)數(shù)據(jù)區(qū)中各物理量的含意見第 3 章中的相關(guān)寄存器說明。
測量頻率: VMTool 根據(jù)最后兩次收到 VMXXX 實(shí)時(shí)數(shù)據(jù)的時(shí)間差估算得到的數(shù)據(jù)接收速率。由于 VMXXX 模塊采用測量優(yōu)先的工作策略, 若模塊“ 正忙” 時(shí)收到指令,則會(huì)等待當(dāng)前測量完成后才會(huì)響應(yīng)并執(zhí)行指令, 返回指令的響應(yīng)信息, 故此, 當(dāng)使用本節(jié)介紹的“ 自動(dòng)讀取” 功能時(shí), 將讀取時(shí)間間隔設(shè)置為小于模塊實(shí)際測量速率的值, 此時(shí)模塊每次的測量結(jié)果均被讀取到,這種情況下計(jì)算得出的數(shù)據(jù)接收速率其實(shí)就是模塊的讀數(shù)速率。 如:若通過觀察,模塊的讀數(shù)速率為 1Hz 左右時(shí),此處的自動(dòng)讀取時(shí)間間隔應(yīng)設(shè)置為比 1000 毫秒低的值,推薦為 500ms, 這樣得到的測量頻率值就是模塊讀數(shù)速率,若此時(shí)時(shí)間間隔設(shè)置為大于 1000ms 的值時(shí),得到的測量頻率值僅能說明界面的更新速率,而與模塊的讀數(shù)速率沒有直接關(guān)系。
運(yùn)行狀態(tài): 包括指令校驗(yàn)、采樣超時(shí)等數(shù)個(gè)運(yùn)行狀態(tài)標(biāo)志, True 表示狀態(tài)為真(或“ 是” ),F(xiàn)alse 表示狀態(tài)為假(或“ 否” )。

振弦采集模塊
二、軟件握手協(xié)議
VMTool 支持與模塊之間的軟件握手協(xié)議, 在模塊啟用了軟件握手前提下( 詳見“3.7 小節(jié)中關(guān)于軟件握手的說明” ), VMTool 可以利用軟件協(xié)議實(shí)現(xiàn)僅在模塊處于空閑時(shí)才會(huì)向模塊發(fā)送指令。通過點(diǎn)擊主界面指令區(qū)內(nèi)的握手協(xié)議下接框,選擇【 軟件握手】 選項(xiàng),開啟 VMTool 的軟件握手功能。 啟用軟件握手之前, 向模塊發(fā)送指令后模塊通常不會(huì)立即響應(yīng)( 數(shù)據(jù)發(fā)送指示器閃爍后數(shù)據(jù)接收指示器不會(huì)立即閃爍), 啟用軟件握手之后, 會(huì)觀察到數(shù)據(jù)發(fā)送指示器閃爍后數(shù)據(jù)接收指示器也會(huì)立即閃爍,即: 向模塊發(fā)送的指令得到了即時(shí)響應(yīng)。
若 VMTool 開啟了軟件握手功能而 VMXXX 模塊未開啟此功能時(shí), 會(huì)導(dǎo)致 VMTool 因?yàn)槲唇邮盏接行У能浖帐謪f(xié)議信號(hào)而長時(shí)間處于指令準(zhǔn)備發(fā)送狀態(tài),并在等待超時(shí)后才會(huì)向模塊發(fā)送,從 VMTool 狀態(tài)欄可以觀察到這一過程,會(huì)有正在檢測模塊軟件握手信號(hào)和未檢測到軟件握手信號(hào)顯示。
審核編輯:湯梓紅
-
模塊
+關(guān)注
關(guān)注
7文章
2696瀏覽量
47437 -
寄存器
+關(guān)注
關(guān)注
31文章
5336瀏覽量
120257 -
采集模塊
+關(guān)注
關(guān)注
0文章
136瀏覽量
9552
發(fā)布評論請先 登錄
相關(guān)推薦
工程安全監(jiān)測中的振弦采集儀技術(shù)解析與應(yīng)用
工程安全監(jiān)測儀器:振弦采集儀的應(yīng)用與發(fā)展

振弦采集儀的工程安全監(jiān)測實(shí)踐與案例分析

基于振弦采集儀的工程安全監(jiān)測技術(shù)研究與應(yīng)用
基于振弦采集儀的巖土工程振弦監(jiān)測技術(shù)研究與應(yīng)用
振弦采集儀在巖土工程監(jiān)測中的故障排除和維護(hù)要點(diǎn)

振弦采集儀在隧道工程中的監(jiān)測與應(yīng)用
基于振弦采集儀的土體變形監(jiān)測與分析
巖土工程中振弦采集儀的選型與使用指南
振弦采集儀:高效準(zhǔn)確,助力工程監(jiān)測
振弦采集儀在混凝土結(jié)構(gòu)監(jiān)測中的應(yīng)用研究
振弦采集儀在工程監(jiān)測中的應(yīng)用研究
工程監(jiān)測振弦采集儀的原理與設(shè)計(jì)
振弦采集儀在橋梁健康監(jiān)測中的應(yīng)用與分析
振弦采集儀在地鐵隧道施工監(jiān)測中的應(yīng)用與分析






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論