 決策規劃,全局路徑規劃常用算法
決策規劃,全局路徑規劃常用算法
正菜之前,我們先來了解一下圖(包括有向圖和無向圖)的概念。圖是圖論中的基本概念,用于表示物體與物體之間存在某種關系的結構。在圖中,物體被稱為節點或頂點,并用一組點或小圓圈表示。節點間的關系稱作邊,可以用直線或曲線來表示節點間的邊。
如果給圖的每條邊規定一個方向,那么得到的圖稱為有向圖,其邊也稱為有向邊,如圖10所示。在有向圖中,與一個節點相關聯的邊有出邊和入邊之分,而與一個有向邊關聯的兩個點也有始點和終點之分。相反,邊沒有方向的圖稱為無向圖。
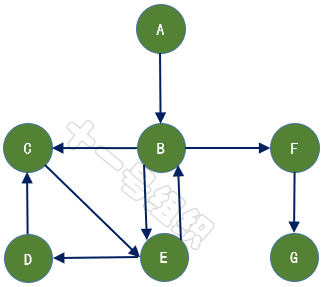
圖10有向圖示例
數學上,常用二元組G =(V,E)來表示其數據結構,其中集合V稱為點集,E稱為邊集。對于圖6所示的有向圖,V可以表示為{A,B,C,D,E,F,G},E可以表示為{,,,,,,}。表示從頂點A發向頂點B的邊,A為始點,B為終點。
在圖的邊中給出相關的數,稱為權。權可以代表一個頂點到另一個頂點的距離、耗費等,帶權圖一般稱為網。
在全局路徑規劃時,通常將圖11所示道路和道路之間的連接情況,通行規則,道路的路寬等各種信息處理成有向圖,其中每一個有向邊都是帶權重的,也被稱為路網(Route Network Graph)。
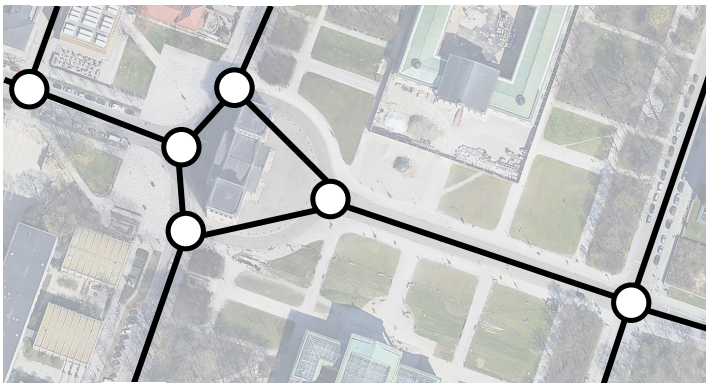
圖11道路連接情況
那么,全局路徑的規劃問題就變成了在路網中,搜索到一條最優的路徑,以便可以盡快見到那個心心念念的她,這也是全局路徑規劃算法最樸素的愿望。而為了實現這個愿望,誕生了Dijkstra和A*兩種最為廣泛使用的全局路徑搜索算法。
Dijkstra算法
戴克斯特拉算法(Dijkstra’s algorithm)是由荷蘭計算機科學家Edsger W. Dijkstra在1956年提出,解決的是有向圖中起點到其他頂點的最短路徑問題。
假設有A、B、C、D、E、F五個城市,用有向圖表示如圖12,邊上的權重代表兩座城市之間的距離,現在我們要做的就是求出起點A城市到其它城市的最短距離。
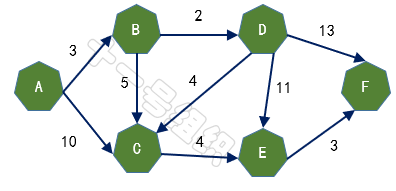
圖12 五個城市構建的有向圖
用Dijkstra算法求解步驟如下:
(1)創建一個二維數組E來描述頂點之間的距離關系,如圖13所示。E[B][C]表示頂點B到頂點C的距離。自身之間的距離設為0,無法到達的頂點之間設為無窮大。
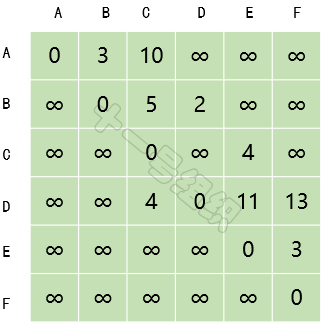
圖13 頂點之間的距離關系
(2)創建一個一維數組Dis來存儲起點A到其余頂點的最短距離。一開始我們并不知道起點A到其它頂點的最短距離,一維數組Dis中所有值均賦值為無窮大。接著我們遍歷起點A的相鄰頂點,并將與相鄰頂點B和C的距離3(E[A][B])和10(E[A][C])更新到Dis[B]和Dis[C]中,如圖14所示。這樣我們就可以得出起點A到其余頂點最短距離的一個估計值。
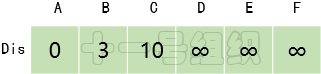
圖14 Dis經過一次遍歷后得到的值
(3)接著我們尋找一個離起點A距離最短的頂點,由數組Dis可知為頂點B。頂點B有兩條出邊,分別連接頂點C和D。因起點A經過頂點B到達頂點C的距離8(E[A][B] + E[B][C] = 3 + 5)小于起點A直接到達頂點C的距離10,因此Dis[C]的值由10更新為8。同理起點A經過B到達D的距離5(E[A][B] + E[B][D] = 3 + 2)小于初始值無窮大,因此Dis[D]更新為5,如圖15所示。
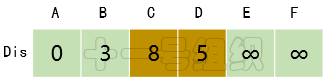
圖15Dis經過第二次遍歷后得到的值
(4)接著在剩下的頂點C、D、E、F中,選出里面離起點A最近的頂點D,繼續按照上面的方式對頂點D的所有出邊進行計算,得到Dis[E]和Dis[F]的更新值,如圖16所示。
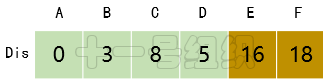
圖16 Dis經過第三次遍歷后得到的值
(5)繼續在剩下的頂點C、E、F中,選出里面離起點A最近的頂點C,繼續按照上面的方式對頂點C的所有出邊進行計算,得到Dis[E]的更新值,如圖17所示。
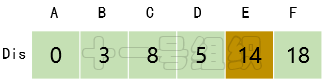
圖17 Dis經過第四次遍歷后得到的值
(6)繼續在剩下的頂點E、F中,選出里面離起點A最近的頂點E,繼續按照上面的方式對頂點E的所有出邊進行計算,得到Dis[F]的更新值,如圖18所示。
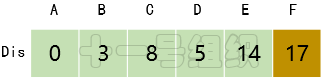
圖18 Dis經過第五次遍歷后得到的值
(6)最后對頂點F所有點出邊進行計算,此例中頂點F沒有出邊,因此不用處理。至此,數組Dis中距離起點A的值都已經從“估計值”變為了“確定值”。
基于上述形象的過程,Dijkstra算法實現過程可以歸納為如下步驟:
(1)將有向圖中所有的頂點分成兩個集合P和Q,P用來存放已知距離起點最短距離的頂點,Q用來存放剩余未知頂點。可以想象,一開始,P中只有起點A。同時我們創建一個數組Flag[N]來記錄頂點是在P中還是Q中。對于某個頂點N,如果Flag[N]為1則表示這個頂點在集合P中,為1則表示在集合Q中。
(2)起點A到自己的最短距離設置為0,起點能直接到達的頂點N,Dis[N]設為E[A][N],起點不能直接到達的頂點的最短路徑為設為∞。
(3)在集合Q中選擇一個離起點最近的頂點U(即Dis[U]最小)加入到集合P。并計算所有以頂點U為起點的邊,到其它頂點的距離。例如存在一條從頂點U到頂點V的邊,那么可以通過將邊U->V添加到尾部來拓展一條從A到V的路徑,這條路徑的長度是Dis[U]+e[U][V]。如果這個值比目前已知的Dis[V]的值要小,我們可以用新值來替代當前Dis[V]中的值。
(4)重復第三步,如果最終集合Q結束,算法結束。最終Dis數組中的值就是起點到所有頂點的最短路徑。
A*算法
1968年,斯坦福國際研究院的Peter E. Hart, Nils Nilsson以及Bertram Raphael共同發明了A*算法。A*算法通過借助一個啟發函數來引導搜索的過程,可以明顯地提高路徑搜索效率。
下文仍以一個實例來簡單介紹A*算法的實現過程。如圖19所示,假設小馬要從A點前往B點大榕樹底下去約會,但是A點和B點之間隔著一個池塘。為了能盡快提到達約會地點,給姑娘留下了一個守時踏實的好印象,我們需要給小馬搜索出一條時間最短的可行路徑。
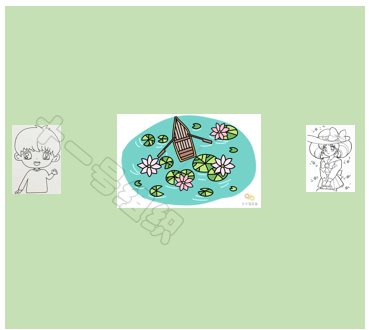
圖19 約會場景示意圖
A*算法的第一步就是簡化搜索區域,將搜索區域劃分為若干柵格。并有選擇地標識出障礙物不可通行與空白可通行區域。一般地,柵格劃分越細密,搜索點數越多,搜索過程越慢,計算量也越大;柵格劃分越稀疏,搜索點數越少,相應的搜索精確性就越低。
如圖20所示,我們在這里將要搜索的區域劃分成了正方形(當然也可以劃分為矩形、六邊形等)的格子,圖中藍色格子代表A點(小馬當前的位置),紫色格子代表B點(大榕樹的位置),灰色格子代表池塘。同時我們可以用一個二維數組S來表示搜素區域,數組中的每一項代表一個格子,狀態代表可通行和不可通行。
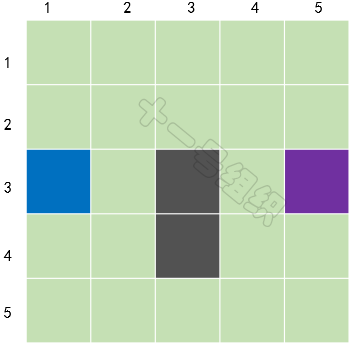
圖20 經過簡化后的搜索區域
接著我們引入兩個集合OpenList和CloseList,以及一個估價函數F = G + H。OpenList用來存儲可到達的格子,CloseList用來存儲已到達的格子。G代表從起點到當前格子的距離,H表示在不考慮障礙物的情況下,從當前格子到目標格子的距離。F是起點經由當前格子到達目標格子的總代價,值越小,綜合優先級越高。
G和H也是A*算法的精髓所在,通過考慮當前格子與起始點的距離,以及當前格子與目標格子的距離來實現啟發式搜索。對于H的計算,又有兩種方式,一種是歐式距離,一種是曼哈頓距離。
歐式距離用公式表示如下,物理上表示從當前格子出發,支持以8個方向向四周格子移動(橫縱向移動+對角移動)。

曼哈頓距離用公式表示如下,物理上表示從當前格子出發,支持以4個方向向四周格子移動(橫縱向移動)。這是A*算法最常用的計算H值方法,本文H值的計算也采用這種方法。

現在我們開始搜索,查找最短路徑。首先將起點A放入到OpenList中,并計算出此時OpenList中F值最小的格子作為當前方格移入到CloseList中。由于當前OpenList中只有起點A這個格子,所以將起點A移入CloseList,代表這個格子已經檢查過了。
接著我們找出當前格子A上下左右所有可通行的格子,看它們是否在OpenList當中。如果不在,加入到OpenList中計算出相應的G、H、F值,并把當前格子A作為它們的父節點。本例子,我們假設橫縱向移動代價為10,對角線移動代價為14。
我們在每個格子上標出計算出來的F、G、H值,如圖21所示,左上角是F,左下角是G,右下角是H。通過計算可知S[3][2]格子的F值最小,我們把它從OpenList中取出,放到CloseList中。
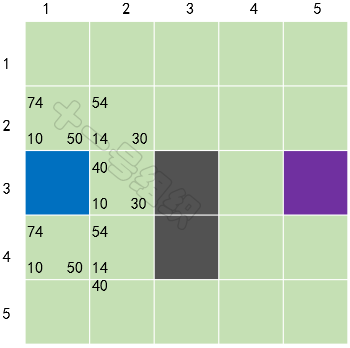
圖21 第一輪計算后的結果
接著將S[3][2]作為當前格子,檢查所有與它相鄰的格子,忽略已經在CloseList或是不可通行的格子。如果相鄰的格子不在OpenList中,則加入到OpenList,并將當前方格子S[3][2]作為父節點。
已經在OpenList中的格子,則檢查這條路徑是否最優,如果非最優,不做任何操作。如果G值更小,則意味著經由當前格子到達OpenList中這個格子距離更短,此時我們將OpenList中這個格子的父節點更新為當前節點。
對于當前格子S[3][2]來說,它的相鄰5個格子中有4個已經在OpenList,一個未在。對于已經在OpenList中的4個格子,我們以它上面的格子S[2][2]舉例,從起點A經由格子S[3][2]到達格子S[2][2]的G值為20(10+10)大于從起點A直接沿對角線到達格子S[2][2]的G值14。顯然A經由格子S[3][2]到達格子S[2][2]不是最優的路徑。當把4個已經在OpenList 中的相鄰格子都檢查后,沒有發現經由當前方格的更好路徑,因此我們不做任何改變。
對于未在OpenList的格子S[2][3](假設小馬可以斜穿墻腳),加入OpenList中,并計算它的F、G、H值,并將當前格子S[3][2]設置為其父節點。經歷這一波騷操作后,OpenList中有5個格子,我們需要從中選擇F值最小的那個格子S[2][3],放入CloseList中,并設置為當前格子,如圖22所示。
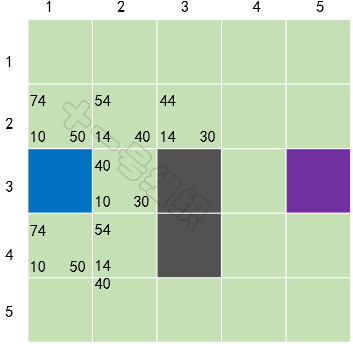
圖22第二輪計算后的結果
重復上面的故事,直到終點也加入到OpenList中。此時我們以當前格子倒推,找到其父節點,父節點的父節點……,如此便可搜索出一條最優的路徑,如圖23中紅色圓圈標識。
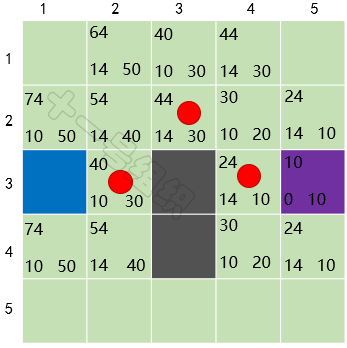
圖23 最后計算得到的結果
基于上述形象的過程,A*算法實現過程可以歸納為如下步驟:
(1)將搜索區域按一定規則劃分,把起點加入OpenList。
(2)在OpenList中查找F值最小的格子,將其移入CloseList,并設置為當前格子。
(3)查找當前格子相鄰的可通行的格子,如果它已經在OpenList中,用G值衡量這條路徑是否更好。如果更好,將該格子的父節點設置為當前格子,重新計算F、G值,如果非更好,不做任何處理;如果不在OpenList中,將它加入OpenList中,并以當前格子為父節點計算F、G、H值。
(4)重復步驟(2)和步驟(3),直到終點加入到OpenList中。
兩種算法比較
Dijkstra算法的基本思想是“貪心”,主要特點是以起點為中心向周圍層層擴展,直至擴展到終點為止。通過Dijkstra算法得出的最短路徑是最優的,但是由于遍歷沒有明確的方向,計算的復雜度比較高,路徑搜索的效率比較低。且無法處理有向圖中權值為負的路徑最優問題。
A*算法將Dijkstra算法與廣度優先搜索(Breadth-First-Search,BFS)算法相結合,并引入啟發函數(估價函數),大大減少了搜索節點的數量,提高了搜索效率。但是A*先入為主的將最早遍歷路徑當成最短路徑,不適用于動態環境且不太適合高維空間,且在終點不可達時會造成大量性能消耗。
圖24是兩種算法路徑搜索效率示意圖,左圖為Dijkstra算法示意圖,右圖為A*算法示意圖,帶顏色的格子表示算法搜索過的格子。由圖24可以看出,A*算法更有效率,手術的格子更少。
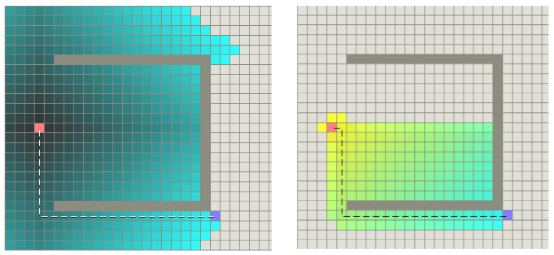
圖24 Dijkstra算法和A*算法搜索效率對比圖(圖片來源:https://mp.weixin.qq.com/s/myU204Uq3tfuIKHGD3oEfw)
審核編輯 :李倩
-
算法
+關注
關注
23文章
4615瀏覽量
92971 -
數組
+關注
關注
1文章
417瀏覽量
25962
原文標題:決策規劃,全局路徑規劃常用算法
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
外資制造業可利用AI提升決策能力
黑芝麻智能端到端算法參考模型公布

AGV轉運機器人需求快速增長,如何進行障礙物檢測確保安全?

多臺倉儲AGV協作全局路徑規劃算法的研究

激光雷達在城市規劃中的應用
基于儲能電站提升風電消納能力的電源規劃研究淺析

淺談基于儲能電站提高風電消納能力的電源規劃研究
智慧產業園區規劃的注意事項

AGV系統設計解析:布局-車體-對接-數量計算-路徑規劃

【Vision Board創客營連載體驗】基于RA8D1-Vision Board的自動路徑規劃小車
谷歌Gemini新增旅行規劃功能,助用戶高效規劃度假行程
VADv2:基于概率性規劃的端到端自動駕駛
沖壓自動線規劃的幾點考慮






 工商網監
工商網監
評論