 自適應四輪底盤的制作分享
自適應四輪底盤的制作分享
1.運動功能說明
自適應四輪底盤可以通過左側2個驅動輪和右側2個驅動輪的差速運動配合來實現前進、后退、原地轉向、大半徑轉向等基本行駛功能。可以在凸凹不平的地面上行駛。


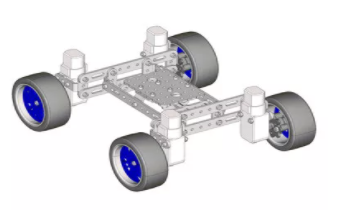
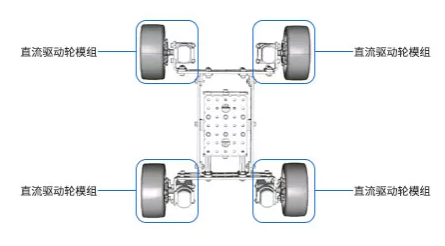
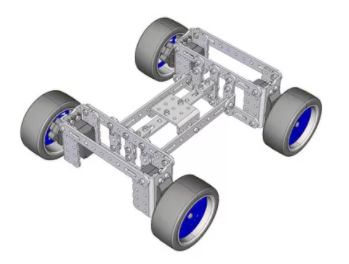
2.結構說明
樣機包含四個直流驅動輪模組,固定在一個由連桿組構成的懸架上,具備懸掛功能,有更好的越障、抓地能力,還能降低車身顛簸。
3.運動功能實現
3.1 電子硬件
在這個示例中,我們采用了以下硬件,請大家參考:

由于同側的驅動輪的運動狀態始終是一樣的。因此同側的兩個直流電機可以通過1拖2電機線共用1個直流電機接口。

先將同側直流電機接在1條1拖2電機線上,然后在分別接在兩個直流電機接口上,兩個直流電機接口的針腳號分別為(D5,D6)以及(D9,D10),并將主控板和電池在車身固定好。
3.2 編寫程序【完整代碼詳見 https://www.robotway.com/h-col-124.html】
前進功能的代碼
|
/*------------------------------------------------------------------------------------ 版權說明:Copyright 2022 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 機器譜 2022-5-31 https://www.robotway.com/ ------------------------------ 實驗功能: 實現自適應四輪底盤前進. ----------------------------------------------------- 實驗接線: 一拖二直流電機線:左側車輪接:D9,D10 | | | | .-----------------------------------. | | | |-------. | |【車頭】| | |-------* | | *-----------------------------------* | | | | 一拖二直流電機線:右側車輪接:D5,D6 ------------------------------------------------------------------------------------*/ voidForward(); // 前進 //程序初始化部分:設置電機引腳為輸出模式 voidsetup() { pinMode( 5 , OUTPUT); //將引腳5設置為輸出模式 pinMode( 6 , OUTPUT); //將引腳6設置為輸出模式 pinMode( 9 , OUTPUT); //將引腳9設置為輸出模式 pinMode( 10 , OUTPUT);//將引腳10設置為輸出模式 } //主程序部分:小車前進 voidloop() { Forward(); } //封裝小車前進動作子程序 voidForward() { digitalWrite( 5 , LOW ); //右輪前進 digitalWrite( 6 , HIGH ); digitalWrite( 9 , LOW ); //左輪前進 digitalWrite( 10 , HIGH ); } |
原地轉向功能的代碼
|
/*------------------------------------------------------------------------------------ 版權說明:Copyright 2022 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 機器譜 2022-5-31 https://www.robotway.com/ ------------------------------------ 實驗功能: 實現自適應四輪底盤原地旋轉(差速方式). 本實驗現象為四輪四驅底盤原地左轉. ---------------------------------------------------- 實驗接線: 一拖三直流電機線:左側車輪接:D9,D10 | | | | | | .-----------------------------------. | | | |-------. | |【車頭】| | |-------* | | *-----------------------------------* | | | | | | 一拖三直流電機線:右側車輪接:D5,D6 ------------------------------------------------------------------------------------*/ voidturn_Left(); // 原地轉向(本示例為原地左轉) //程序初始化部分:設置電機引腳為輸出模式 voidsetup() { pinMode( 5 , OUTPUT); //將引腳5設置為輸出模式 pinMode( 6 , OUTPUT); //將引腳6設置為輸出模式 pinMode( 9 , OUTPUT); //將引腳9設置為輸出模式 pinMode( 10 , OUTPUT);//將引腳10設置為輸出模式 } //主程序部分:小車差速自轉[本示例為小車左轉] voidloop() { turn_Left(); } //封裝小車自轉動作子程序(本示例為左轉) voidturn_Left(){ digitalWrite( 5 , LOW ); //右輪前進 digitalWrite( 6 , HIGH ); digitalWrite( 9 , HIGH ); //左輪后退 digitalWrite( 10 , LOW); } |
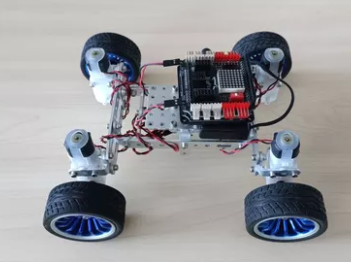
4.擴展樣機
本樣機可以通過使用不同的驅動輪模組,或者對連桿組懸架進行改造來實現擴展,如下圖所示:
審核編輯黃宇
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
直流
+關注
關注
7文章
439瀏覽量
42945 -
電機
+關注
關注
142文章
9027瀏覽量
145621 -
小車
+關注
關注
0文章
54瀏覽量
20971 -
模組
+關注
關注
6文章
1496瀏覽量
30414
發布評論請先 登錄
相關推薦
【科普】干貨!帶你從0了解移動機器人(六) (底盤結構類型)
結構之一,其底盤結構由1個舵輪、2個定向輪組成,在叉車上面有著非常廣泛的應用。單舵輪底盤結構可以直接適應各種地面,保證驅動舵輪一定著地。結構簡單、成本低,由于是單

基于AccelDSP的自適應濾波器設計
【作者】:袁江南;湯碧玉;陳輝煌;【來源】:《廈門大學學報(自然科學版)》2010年02期【摘要】:給出了一種自適應濾波器的設計和FPGA的實現方法.簡要分析了最小均方誤差(LMS)、歸一化最小均方
發表于 04-24 09:01
微型迷你小車底盤
`本小車底盤由四個微型減速器、四個微型小車輪、四顆M2X12mm的螺絲、兩根直徑2mm長20mm的鐵軸、兩條7mmX7mmX153mm帶孔塑料條組成,
發表于 04-20 00:21
自適應數字傳感器設計
信號,這樣會使測試結果的分析造成偏差。自適應數字傳感器在選擇高量程加速度傳感器的條件下,能夠根據加速度信號的幅值自動調整測試增益,保持加速度信號的完整輸出,拓寬了動態測試范圍,實現了加速度傳感器測量
發表于 11-08 16:23
基于RT-Thread+RA6M4的麥輪結構的底盤運動控制系統設計案例
1、基于RT-Thread+RA6M4的麥輪結構的底盤運動控制系統設計本項目設計了一個麥輪結構的小車底盤運動系統,經過對底盤的運動學分析,解
發表于 08-17 14:50
模糊自適應PID在汽車底盤測功機中的仿真研究
在汽車底盤測功機研究中,由于汽車底盤測功機是一個復雜的時變非線性、大慣性系統。傳統的PID控制對于非線性、時變性的系統難以達到控制精度的要求,而模糊自適應PID控制具有在
發表于 05-06 11:19
?58次下載

什么是自適應控制_自適應控制基本原理
自適應控制包括模型參考自適應控制和自校正控制兩個分支。前者是20世紀50年代建立起來的,它是通過自適應機構來克服系統模型參數的不確定性;后者是瑞典學者Astrom1973年提出的,它是通過在線估計系統模型參數,進而修改控制器的參
發表于 03-27 09:35
?5.7w次閱讀
自適應控制的優缺點_自適應控制存在的問題及發展
近年來,自校正控制技術如雨后春筍般地迅速發展。關于離散時間隨機自適應控制的穩定性和收斂性,澳大刊亞紐卡斯爾大學的Goodwin作出了有益的貢獻。自尋優自適應控制系統、變結構白適應控制系統也得到了相應
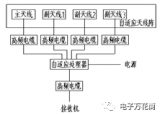
自適應天線系統簡介!自適應天線系統研制概況!
自適應天線系統主要由天線陣、自適應處理器以及射頻電纜網構成。其中,天線陣由多個天線單元構成,通常為四個天線,一個為主天線,接收有用信號,其余為輔助天線,產生對消干擾的參考信號。自適應天
什么是自適應光學?自適應光學原理與方法的發展
目前,世界上大型的望遠鏡系統都采用了自適應光學技術,自適應光學的出現為補償動態波前擾動,提高光波質量提供了新的研究方向。
60多年來,自適應光學技術獲得蓬勃發展,現已應用于天文學、空間光學、激光、生物醫學等領域。
發表于 03-11 10:27
?2111次閱讀





 工商網監
工商網監
評論