


許多應用都需要一個放大器,該放大器為負載提供適量的功率,同時保持良好的直流精度,負載的大小決定了所需的電路類型。精密運算放大器可以驅動要求小于50 mW的負載,并且可以構建具有精密運算放大器輸入級和分立功率晶體管輸出級的復合放大器來驅動需要瓦特的負載。但是,在功率范圍的中間不存在好的解決方案。要么運算放大器無法驅動負載,要么電路變得龐大、復雜且昂貴。
最近,惠斯通電橋驅動器的設計中出現(xiàn)了這種困境。激勵電壓直接影響失調和量程,因此需要直流精度。在這種情況下,應用可以容忍源電壓和電橋之間的誤差小于1 mV。采用7 V至15 V電源供電時,電路必須以100 mV至5 V的單位增益驅動電橋。
為了使問題進一步復雜化,可以使用各種不同的電橋電阻。例如,應變計的標準阻抗為 120 Ω 或 350 Ω。采用 120 Ω 電橋時,放大器必須提供 42 mA 電流以維持 5 V 電橋驅動。此外,電路必須能夠驅動高達10 nF的電壓。這既考慮了電纜和橋式去耦電容器。
放大器選擇
設計該電路的第一步是選擇能夠驅動負載的放大器。在所需的負載電流下,其壓差(VOH)必須小于電路的可用裕量。對于此設計,最小電源為7 V,最大輸出為5 V,提供250 mV裕量,可用裕量(VDD – VOUT)為1.75 V。所需的負載電流為 42 mA。
ADA4661-2精密、雙通道運算放大器具有軌到軌輸入和輸出。其大輸出級能夠驅動大量電流。數(shù)據(jù)手冊規(guī)定,當提供40 mA電流時,壓差為900 mV,因此應輕松滿足1.75 V裕量要求。
雖然壓差限制了低壓電源的電路工作,但功耗將限制高壓電源的操作。可以計算芯片溫升以確定最大安全工作溫度。MSOP封裝簡化了原型設計,但LFCSP封裝具有更好的熱性能,因此應盡可能使用它。熱阻(θ賈)對于MSOP為142°C/W,對于LFCSP為83.5°C/W。最大管芯溫升的計算方法是將熱阻乘以最大功耗。采用 15V 電源和 5V 輸出時,裕量為 10 V。最大電流為 42mA,功耗為 420mW。由此產生的管芯溫升(MSOP為60°C,LFCSP為35°C)將MSOP的最高環(huán)境溫度限制為65°C或LFCSP為90°C。
芯片和封裝組合的熱性能對于保持精確的電橋激勵電壓也至關重要。遺憾的是,當驅動大輸出電流時,一些運算放大器的性能會嚴重下降。輸出級的功耗會導致芯片兩端出現(xiàn)較大的熱梯度,使匹配的晶體管和微調電路不平衡。ADA4661-2設計用于驅動高功率,同時抑制這些熱梯度。
反饋環(huán)路穩(wěn)定
滿足負載電容規(guī)格非常棘手,因為大多數(shù)運算放大器在沒有外部補償?shù)那闆r下無法驅動10 nF。驅動大容性負載的一種經典技術是使用多反饋拓撲,如圖1所示,其中隔離電阻R。.ISO屏蔽放大器輸出與負載電容C的連接負荷.通過反饋輸出信號 V 來保持直流精度外通過反饋電阻RF。通過電容C反饋放大器輸出來保持環(huán)路穩(wěn)定性F.
為了使該電路有效,R.ISO必須足夠大,以使總負載阻抗在放大器的單位增益頻率下看起來是純阻性的。這很困難,因為該電阻兩端的IR壓降。R 的最大大小.ISO可以通過在最壞情況下分配剩余電壓裕量來確定。具有 5V 輸出的 6.75V 電源可實現(xiàn) 1.75V 的總壓差。放大器其中900 mV,電阻兩端剩余850 mV壓降。這限制了 R 的最大值.ISO到 20 Ω。2 nF負載電容將極點置于4 MHz,這是該放大器的單位增益交越頻率。顯然,多重反饋將不符合要求。
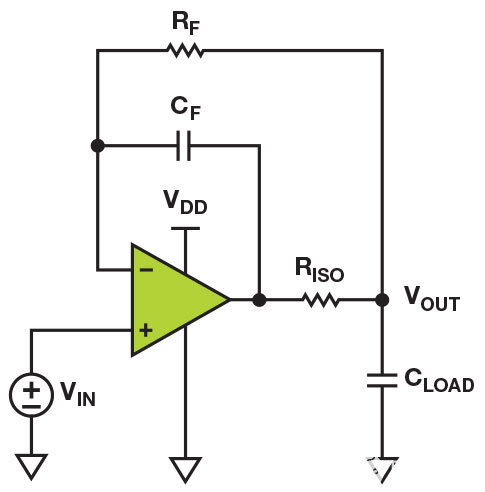
圖1.多重反饋技術。
穩(wěn)定重負載緩沖區(qū)的另一種技術是使用混合單位跟隨器拓撲,如圖 2 所示。這種方法不是試圖移動負載電容極點,而是通過降低反饋因子迫使反饋環(huán)路以較低的頻率進行交越。通過在相移由于負載極點而變得過大之前強制環(huán)路交越來實現(xiàn)穩(wěn)定性。
反饋因子是噪聲增益的倒數(shù),因此可以得出結論,這種方法放棄了單位增益信號路徑。如果這是傳統(tǒng)的反相或同相配置,則情況確實如此,但仔細檢查原理圖會發(fā)現(xiàn)兩個輸入都是驅動的。考慮該電路的一種簡單方法是將反相增益–R疊加F/RS同相增益為 (1 + RF/RS).結果是電路工作在信號增益為+1,噪聲增益為(RS+ RF)/RS.對反饋因子和信號增益的獨立控制使該電路能夠以犧牲電路帶寬為代價穩(wěn)定任何尺寸的負載。
然而,混合單位跟隨電路有幾個缺點。第一個問題是所有頻率的噪聲增益都很高,因此直流誤差如失調電壓 乘以噪聲增益。這使得實現(xiàn)直流規(guī)格極具挑戰(zhàn)性。第二個缺點需要對放大器的內部操作有一定的了解。該放大器采用三級架構,具有嵌套米勒補償功能。輸出級有自己的固定內部反饋。這使得外部反饋環(huán)路穩(wěn)定,而輸出級反饋環(huán)路不穩(wěn)定。
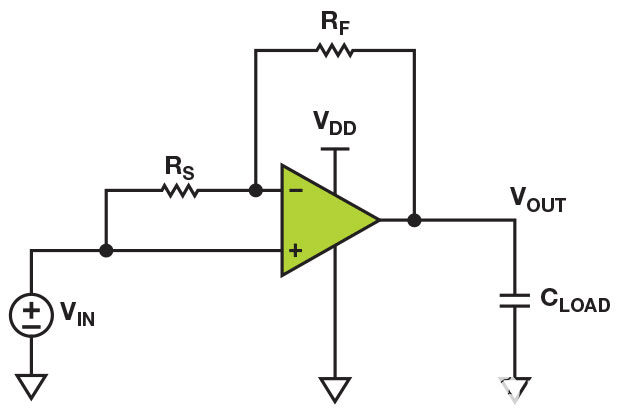
圖2.混合統(tǒng)一跟隨器拓撲。
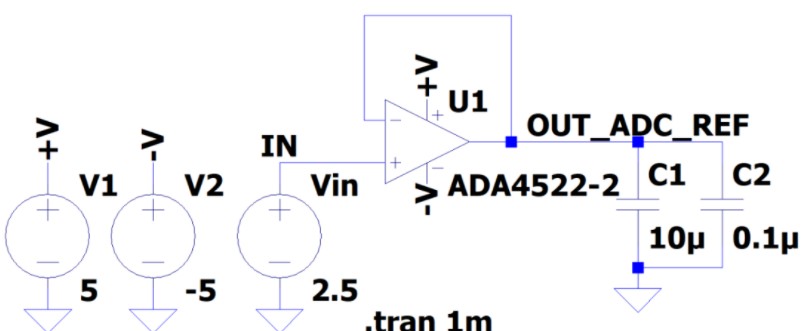
通過結合兩個電路的工作原理,可以克服這兩個問題,如圖3所示。多反饋將低頻和高頻反饋路徑分開,增加了足夠的容性負載隔離,以最大限度地減少輸出級穩(wěn)定性問題。低頻反饋由電橋電壓通過反饋電阻RF驅動。高頻反饋由放大器輸出通過反饋電容CF驅動。
該電路的行為也類似于高頻下的混合單位跟隨器。由電容器阻抗決定的高頻噪聲增益等于(CS+ CF)/CF.該噪聲增益允許反饋環(huán)路以足夠低的頻率進行交越,其穩(wěn)定性不會因負載電容而降低。由于低頻噪聲增益是單位的,因此保持了電路的直流精度。

圖3.橋式驅動器原理圖。
保持直流精度需要仔細注意信號路由,因為涉及大電流。只需 7 mΩ 即可從 42mA 最大負載電流產生 300μV 壓降;該誤差與放大器的失調電壓一樣大。
解決這個問題的一種實用方法是4線開爾文連接,它使用兩個載流連接(通常稱為“力”)來驅動負載電流和兩個電壓測量連接(通常稱為“檢測”)。檢測連接必須盡可能靠近負載,以防止任何負載電流流入其中。
對于橋式驅動器電路,檢測連接應直接在電橋的頂部和底部進行。力線和檢測線之間不應共享任何PCB走線或電纜。The GND意義連接應路由回電壓源 V在.例如,如果刺激是DAC,則GND意義應該連接到參考文獻接地的發(fā)援會。The GND力電橋的連接應有其自己的專用走線,一直追溯到電源,因為允許電橋電流流過接地層會產生不希望的壓降。
誤差預算
該電路的直流誤差預算(如表1所示)主要由放大器的失調電壓和失調電壓漂移決定。它假設操作條件處于最壞情況范圍。總誤差以舒適的裕量滿足1 mV要求。
表 1.誤差預算
| 參數(shù) | 條件 | 計算 | 錯誤 |
| 失調電壓 |
0 V < V厘米< 5 V 6.75 V < V DD< 15 V |
300 μV | |
| 失調電壓漂移 |
0 V < V厘米< 5 V 6.75 V < V DD< 15 V –40°C < T < +70°C |
300 μV/°C × 110°C | 341 μV |
| 功耗 |
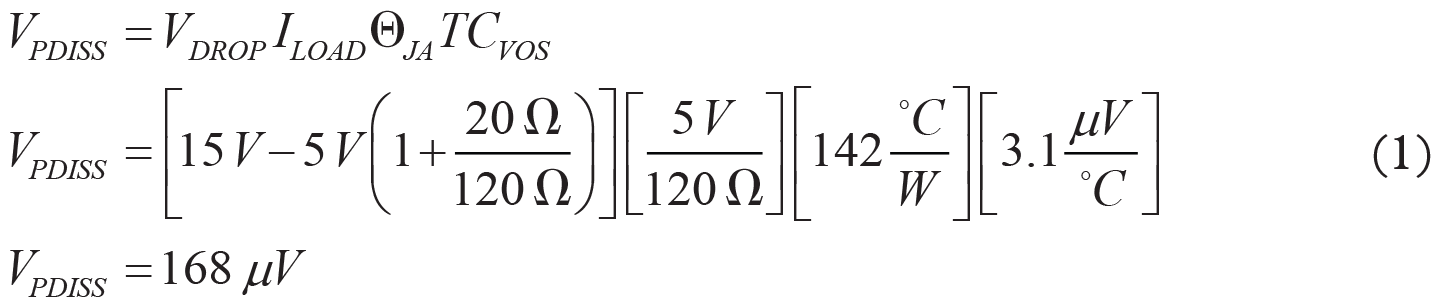
VDD= 15 V 0 V < V 厘米< 5 V |
等式 1 | 168 μV |
|
增益誤差 |
0 V < V厘米< 5 V –40°C < T < +125°C |
5 V × 1/(105 dB + 1) |
27 μV |
|
電源抑制 |
6.75 V < VDD< 15 V |
8.25 V/120 dB |
8 μV |
|
總誤差 |
844 μV |
表中的第三個項是功耗誤差。放大器耗散的功率會增加芯片溫度,這導致失調電壓偏離無負載電流時的環(huán)境溫度。最差情況誤差是用最高電源電壓、最高輸出電壓和最小阻性負載計算得出的,如公式1所示。請注意,放大器兩端的最差情況壓降略微減小了R.ISO電阻器。
直流測量結果
誤差電壓是輸入電壓之差,V在,和負載電壓,V外.圖4顯示了原型電路的誤差電壓與負載電壓的關系。橋式驅動器電路中最大的誤差源是失調電壓和失調電壓漂移。由于放大器的功耗,額外的誤差取決于電橋電壓。電源電壓對功耗的影響可以通過不同的顏色曲線看到。黑色曲線以最小電源電壓(7 V)耗散最小功率(50 mW)。管芯溫升僅為7°C,因此該曲線表示該器件的室溫失調電壓與共模電壓行為的關系。
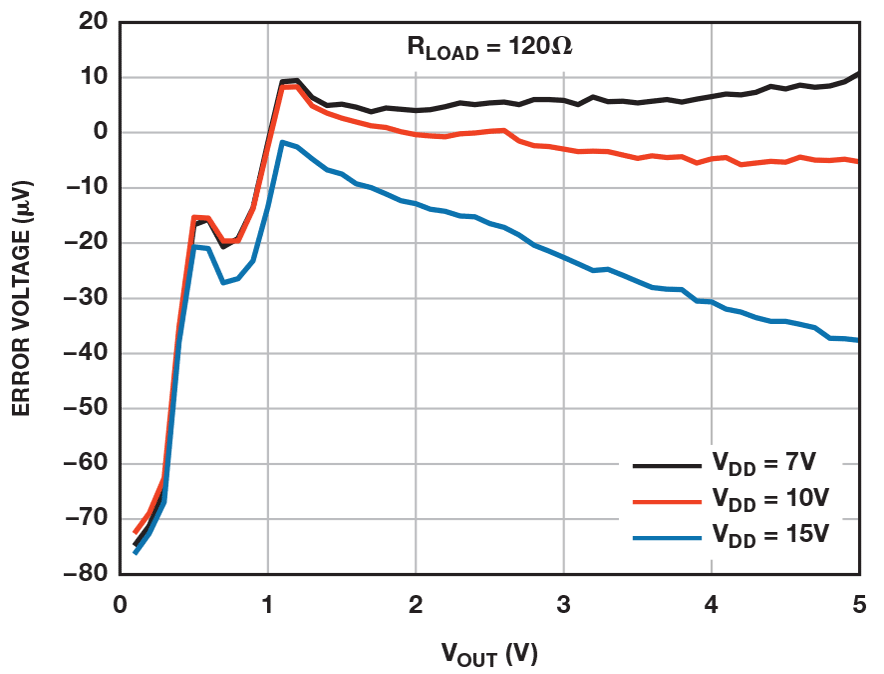
圖4.誤差電壓與輸出電壓的關系
紅色(10 V)和藍色(15 V)曲線分別表示最大功耗為175 mW和385 mW的性能。隨著輸出電壓的增加,額外的功耗導致芯片溫度升高25°C至55°C,從而導致失調電壓漂移。這種額外熱誤差的形狀將是拋物線式的,因為最大功率耗散發(fā)生在V外是 V 的二分之一DD.
電源對失調電壓的強烈依賴性表明應考慮該電路的電源抑制。圖5顯示了在輸出電壓固定時掃描電源電壓時的誤差電壓。黑色曲線表示輕負載外殼,主要由放大器的電源抑制(PSR)決定。對于該器件,10 μV變化代表118 dB PSR。紅色和藍色曲線顯示了輸出由于負載了 350 Ω 和 120 Ω的典型電橋電阻而耗散額外功率時的結果。紅色和藍色曲線的有效PSR分別為110 dB和103 dB。
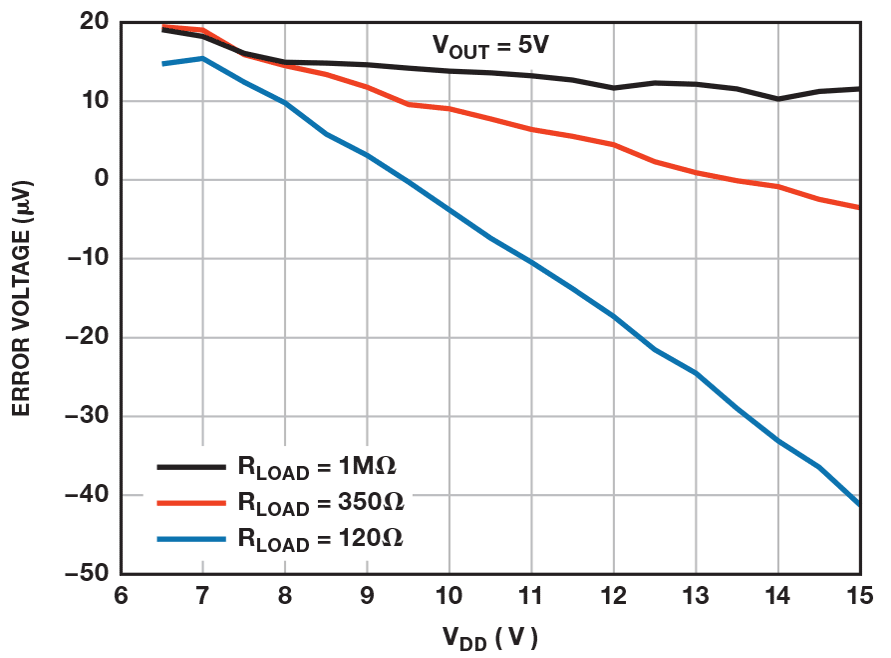
圖5.誤差電壓與電源電壓的關系
該電路的性能顯然取決于失調漂移與溫度的關系。到目前為止,TCV操作系統(tǒng)規(guī)范已用于溫度相關誤差的所有計算。這一假設必須合理,因為放大器功耗導致的芯片溫度升高與環(huán)境溫度變化不同。前者會在芯片表面產生較大的熱梯度,這會破壞放大器的敏感平衡。這些梯度可能導致失調電壓漂移明顯低于數(shù)據(jù)手冊規(guī)格。ADA4661-2經過專門設計,可在不降低失調漂移性能的情況下消耗大量功耗。
圖6顯示了測得的失調漂移隨溫度的關系。在低電源電壓和高電阻負載(–1.2 μV/°C)的黑色曲線中復制了指定的性能。紅色曲線顯示了 120 Ω橋荷載的結果。需要注意的重要一點是曲線的形狀不會改變;它只是通過芯片溫升(6.4°C)向左移動。藍色曲線顯示電源增加到15 V時的結果,這是可以測量電路最大功耗的條件。同樣,曲線的形狀不會改變,由于芯片溫度上升55°C而向左移動。內部功耗已知(385 mW),因此實際熱阻(θ賈) 的系統(tǒng)可以計算 (143°C/W)。考慮工作環(huán)境溫度范圍非常重要。最高管芯溫度不應超過125°C;這意味著最壞情況下負載的最高環(huán)境溫度為70°C。
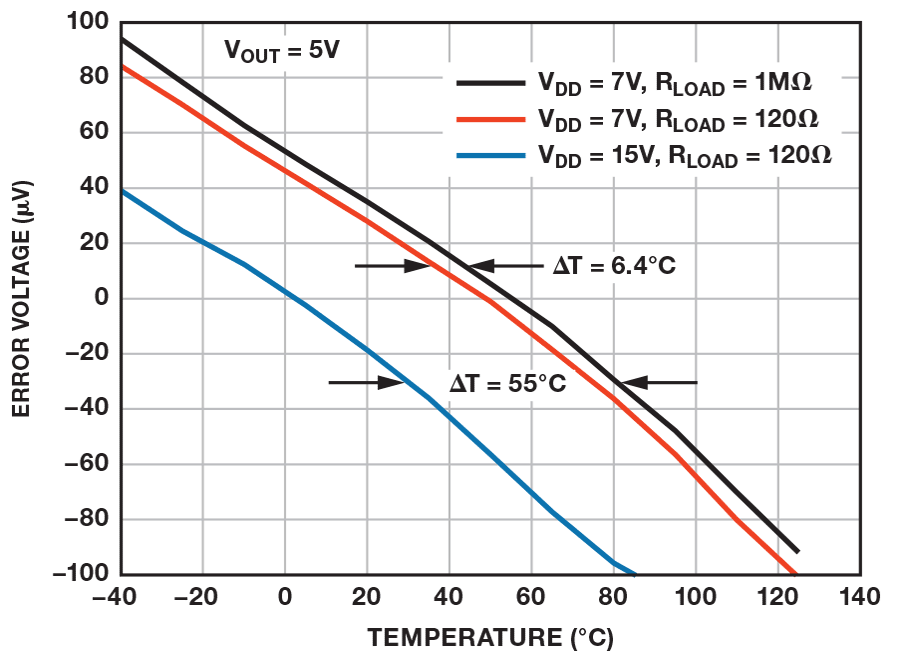
圖6.誤差電壓與環(huán)境溫度的關系
瞬態(tài)測量結果
電路的階躍響應是評估環(huán)路穩(wěn)定性的簡單方法。圖7顯示了高電阻電橋容性負載范圍內測得的階躍響應;圖8顯示了低電阻電橋的相同測量結果。由于反饋網絡中的極點零雙峰,該電路在階躍響應中具有特性過沖。這種雙峰響應是基本的,因為電路的反饋因數(shù)從低頻時的單位下降到高頻時的0.13。由于零點的頻率高于極點,因此即使相位裕量足夠,階躍響應也總是會過沖。此外,雙峰在電路中具有最長的時間常數(shù),因此它往往主導建立時間。在高電阻負載和1 nF容性負載下,最差情況下的穩(wěn)定性和輸出級振鈴可見。
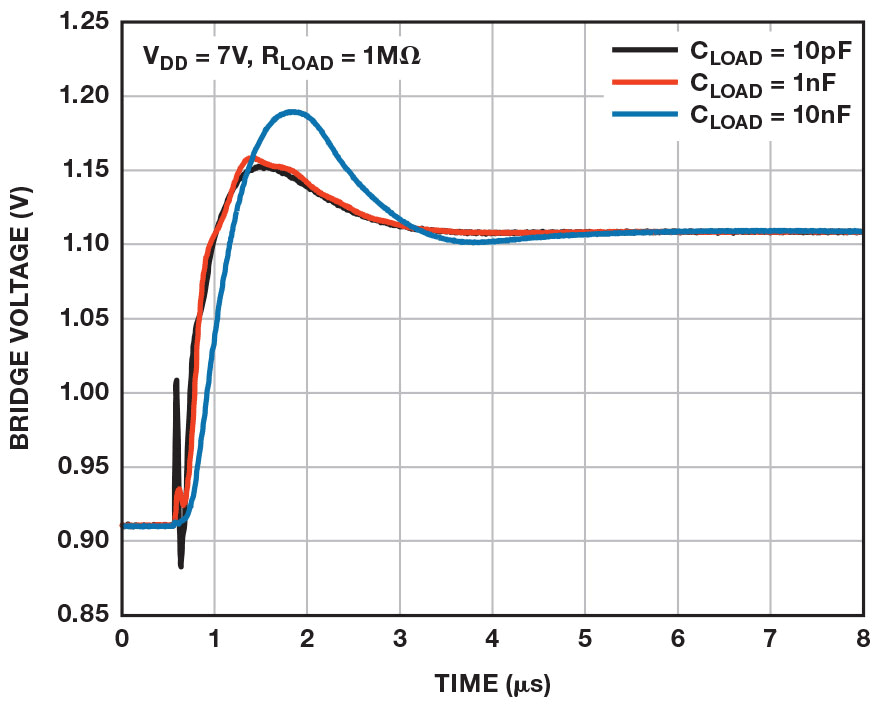
圖7.卸載的階躍響應。
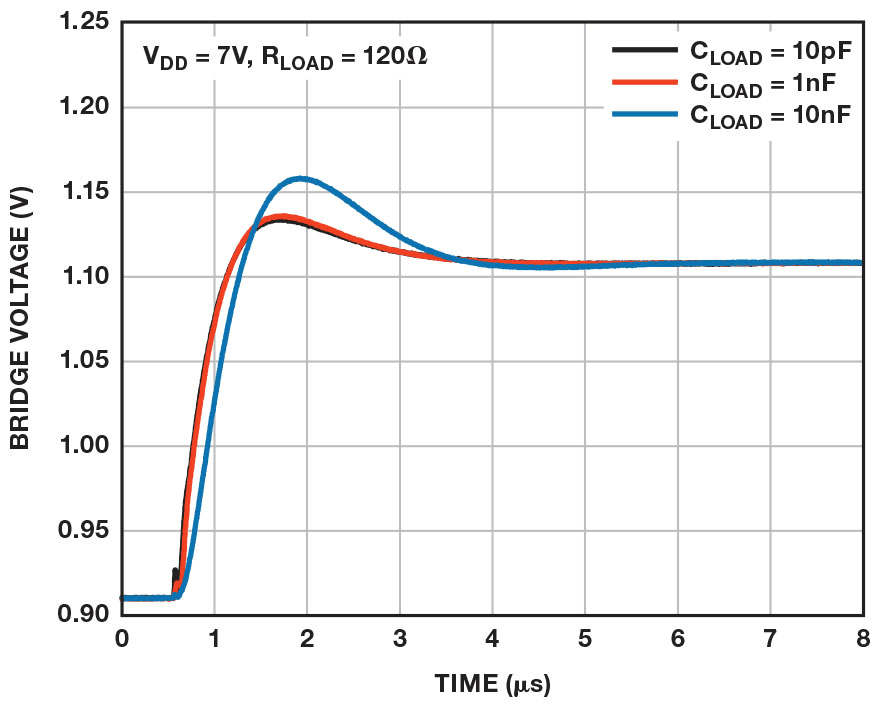
圖8.加載的階躍響應。
結論
本文介紹的負載驅動器電路可以對低至120 Ω的阻性負載施加5 V電壓,總誤差小于1 mV,并穩(wěn)定驅動高達10 nF的總電容。該電路滿足其額定性能,同時采用7 V至15 V寬電源供電,功耗近400 mW。基本電路可通過使用 ±7V 電源為放大器供電來擴展以驅動正負負載。所有這些功能都是通過一個微型 3mm × 3mm 放大器和四個無源元件實現(xiàn)的。
審核編輯:郭婷
-
電源
+關注
關注
185文章
18329瀏覽量
255623 -
放大器
+關注
關注
145文章
14123瀏覽量
216702 -
驅動器
+關注
關注
54文章
8654瀏覽量
149465
發(fā)布評論請先 登錄
有沒有適合的音頻放大器工作在5V單電源下,適用于驅動阻抗600歐姆,200mW的雙線耳機?
寬帶放大器驅動容性負載、感性負載,有哪些注意事項?
利用創(chuàng)造性補償實現(xiàn)小型放大器驅動200 mW負載
提高放大器性能怎么制服容性負載
請問如何利用創(chuàng)造性補償實現(xiàn)小型放大器驅動200 mW負載?
如何使用放大器驅動高容性負載?
運算放大器容性負載驅動問題
放大器驅動容性負載對穩(wěn)定性的影響
利用創(chuàng)造性補償實現(xiàn)小型放大器驅動200 mW負載資料下載

功率放大器可以驅動什么(功率放大器驅動哪些負載可以用)
如何使用高壓放大器驅動高容性負載






 工商網監(jiān)
工商網監(jiān)

評論