 精密旋變數字轉換器可測量角位置和速度
精密旋變數字轉換器可測量角位置和速度
作者:Jakub Szymczak、Shane O‘Meara、Johnny Gealon 和 Christopher Nelson De La Rama
旋轉變壓器是測量精確角位置的機電傳感器,作為可變耦合變壓器運行,初級繞組和兩個次級繞組之間的磁耦合量根據旋轉元件(轉子)的位置而變化,旋轉元件通常安裝在電機軸上。旋轉變壓器用于工業電機控制、伺服、機器人、混合動力和全電動汽車中的動力總成單元,以及許多其他需要精確軸旋轉的應用,可以長時間承受惡劣條件,使其成為惡劣環境中軍事系統的完美選擇。
標準旋轉變壓器在轉子上有一個初級繞組,在定子上有兩個次級繞組。另一方面,可變磁阻旋轉變壓器的轉子上沒有繞組。它們的初級和次級繞組都在定子上,但轉子的顯著性(裸露的極點)將次級繞組的正弦變化與角位置耦合。圖1顯示了經典和可變磁阻旋變器。
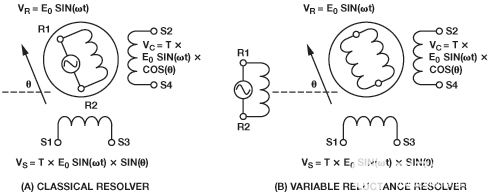
圖1.經典旋轉變壓器與可變磁阻旋轉變壓器。
當初級繞組R1 – R2被正弦信號激勵時,如公式1所示,次級繞組中會感應出一個信號。次級繞組的耦合量是轉子相對于定子位置的函數,衰減因子稱為旋轉變壓器變換比。由于次級繞組的機械位移為90°,因此兩個輸出正弦信號相對于彼此相移90°。旋變器輸入和輸出電壓之間的關系如公式2和公式3所示。等式2為正弦信號;等式3是余弦信號。
 |
(1) |
 |
(2) |
 |
(3) |
其中:θ為軸角,ω為激勵信號頻率,E0是激勵信號幅值,T是旋變變換比。
兩個輸出信號由軸角的正弦和余弦調制。激勵信號以及正弦和余弦輸出信號的圖形表示如圖2所示。正弦信號的最大幅度為 90° 和 270°,余弦信號的最大幅度為 0° 和 180°。
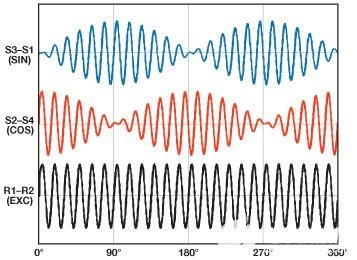
圖2.旋轉變壓器電信號表示。
旋轉變壓器傳感器具有一組獨特的參數,應在設計階段考慮這些參數。表1總結了最關鍵的電氣參數和相應的典型規格。
表 1.旋轉變壓器關鍵參數
|
電氣參數 |
典型范圍 |
單位 |
描述 |
|
輸入電壓 |
3–7 |
V rms |
推薦應用于旋變器初級繞組R1 – R2的激勵信號幅度 |
|
輸入頻率 |
50–20,000 |
赫茲 |
推薦應用于旋變器初級繞組R1 – R2的激勵信號頻率 |
|
轉換率 |
0.2–1.0 |
V/V |
初級繞組和次級繞組信號幅度之比 |
|
輸入阻抗 |
100–500 |
Ω |
旋轉變壓器的輸入阻抗 |
|
相移 |
±25 |
度 |
施加在初級繞組上的激勵信號 (R1 – R2) 和次級繞組上的正弦/余弦信號 (S3 – S1、S2 – S4) 之間的相移 |
|
極對 |
1–3 |
每次機械旋轉的電旋轉次數 |
旋變數字轉換器
初級繞組由正弦波參考信號激勵,兩個差分輸出信號正弦和余弦在次級繞組上電磁感應。旋轉變壓器數字轉換器(RDC)在旋轉變壓器和系統微處理器之間接口,使用這些正弦和余弦信號來解碼電機軸的角位置和轉速。
大多數 RDC 使用 II 型跟蹤環路來執行位置和速度計算。II型環路使用二階濾波器來確保穩態或恒速輸入信號的穩態誤差為零。RDC同時對兩個輸入信號進行采樣,以向跟蹤環路提供數字化數據。使用此類環路的RDC的最新示例是ADI公司的10位至16位跟蹤轉換器AD2S1210,其片內可編程正弦振蕩器為初級繞組提供激勵信號。
如表1所示,典型旋變器需要低阻抗3 V rms至7 V rms信號來驅動初級繞組。RDC 采用 5V 電源供電,通常在激勵輸出端提供 7.2V p-p 差分信號。該信號沒有足夠的幅度和驅動能力來滿足旋變器的輸入規格。此外,旋變器將信號衰減高達5×,因此旋變器輸出幅度不符合RDC的輸入幅度要求,如表2所示。
這個問題的解決方案是使用差分放大器將正弦信號提升到初級。該放大器必須能夠驅動低至100 Ω的負載。一種常見的做法是用大信號驅動初級,以獲得良好的信噪比。然后,輸出正弦和余弦信號可以使用電阻分壓器衰減。
在許多工業和汽車應用中,RDC用于嘈雜的環境,這會將高頻噪聲引入正弦和余弦線。為了解決這個問題,在盡可能靠近RDC的地方插入一個簡單的差分低通濾波器。圖3顯示了一個典型的旋變數字轉換器接口,包括放大器和濾波器。
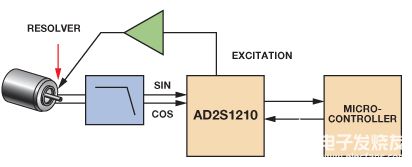
圖3.典型旋轉變壓器系統框圖。
操作理論
圖 4 顯示了 RDC 中的操作塊。轉換器通過產生輸出角度φ來連續跟蹤軸角θ,該輸出角度反饋并與輸入角度進行比較。當轉換器跟蹤位置時,兩個角度之間的誤差最小。
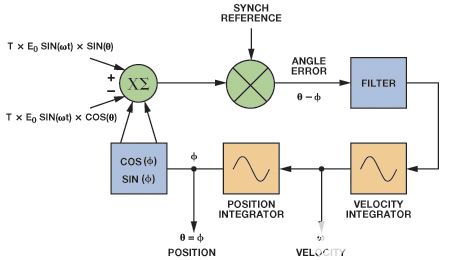
圖4.AD2S1210工作原理框圖
要測量誤差,請將正弦和余弦輸入分別乘以 cos(φ) 和 sin(φ):
 |
(4) |
 |
(5) |
接下來,取兩者之間的區別:
 |
(6) |
然后,使用內部生成的合成參考解調信號:
 |
(7) |
使用三角恒等式,E0(sin θ cos φ – cos θ sin φ) = E0sin(θ – φ),大約等于E0 ( θ – φ) 表示角度誤差 (θ – φ) 的小值。 E0 (θ – φ)是轉子的角度誤差與轉換器的數字角度輸出之間的差值。II型跟蹤環路使誤差信號為零。完成此操作后,φ等于旋轉變壓器角度 θ。
關鍵 RDC 參數
在選擇合適的器件之前,工程師必須考慮用于表征旋變數字轉換器的許多參數。表2顯示了AD2S1210的關鍵RDC參數和規格,它設定了同類最佳轉換器的界限。
表 2.AD2S1210
的關鍵RDC參數和值
|
電氣參數 |
典型范圍 |
單位 |
描述 |
|
輸入電壓 |
2.3–4.0 |
V p-p |
正弦和余弦輸入的差分信號范圍 |
|
鎖相范圍 |
±44 |
度 |
RDC產生的激勵信號與正弦和余弦輸入之間的相移 |
|
角度精度 |
±2.5 |
弧分 |
RDC 的角度精度 |
|
分辨率 |
10, 12, 14, 16 |
位 |
RDC 分辨率 |
|
速度精度 |
2 |
低音水平 |
RDC 提供的速度精度 |
|
跟蹤率 |
3125, 1250, 625, 156 |
RPS |
特定分辨率的跟蹤功能 |
|
建立時間 |
2.2, 6, 14.7, 66 |
女士 |
轉換器在特定分辨率下對 179° 階躍變化的響應時間 |
錯誤源
完整系統的精度取決于RDC的精度,以及旋變器、系統架構、布線、激勵緩沖器和正弦/余弦輸入電路的誤差。系統誤差的最常見來源是幅度失配、信號相移、偏移和加速度。
幅度失配是正弦和余弦信號處于峰值幅度時峰峰值幅度的差異,余弦為0°和180°,正弦為90°和270°。失配可能由旋變器繞組的變化或旋變器與RDC的正弦和余弦輸入之間的增益引起。等式 3 可以改寫為
 |
(8) |
其中δ是余弦信號相對于正弦信號的幅度失配百分比。靜態位置誤差ε(以弧度表示)定義為
 |
(9) |
公式9顯示,幅度失配誤差以兩倍的旋轉速率振蕩,在45°的奇整數倍處最大為δ/2,在0°、90°、180°和270°時沒有誤差。對于12位RDC,0.3%幅度失配將導致大約1 LSB的誤差。
RDC接受來自旋變器的差分正弦和余弦信號。旋變器從載波中移除任何直流分量,因此 V裁判必須增加/2直流偏置,以確保旋變器輸出信號在RDC的正確工作范圍內。SIN和SINLO輸入或COS和COSLO輸入之間的直流偏置中的任何失調都會引入額外的系統誤差。
共模偏移引入的誤差在正弦和余弦信號載波相互反相的象限中更嚴重。這發生在 90° 和 180° 以及 270° 和 360° 之間的位置,如圖 5 所示。端子之間的共模電壓使差分信號偏移兩倍于共模電壓。RDC是比率式的,因此感知到輸入信號幅度的變化會導致位置誤差。
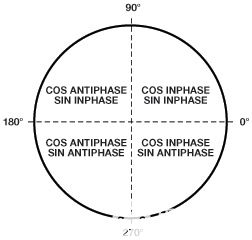
圖5.旋轉變壓器象限。
圖6顯示,即使正弦和余弦的差分峰峰值幅度相等,輸入信號的感知幅度也不同。最壞情況的誤差將發生在135°和315°。在135°時,理想系統中的A = B,但在存在偏移的情況下A≠B,因此會發生感知的幅度不匹配。
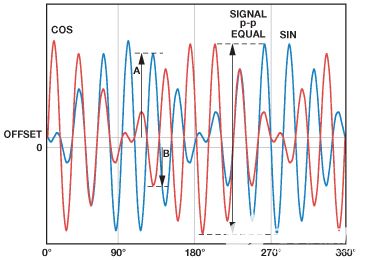
圖6.直流偏置偏移。
另一個誤差來源是差分相移,即旋變器的正弦和余弦信號之間的相移。由于耦合,所有旋變器上都會存在一些差分相移。小旋變器殘余電壓或正交電壓表示小差分相移。如果正弦和余弦信號線的電纜長度不相等或驅動不同的負載,則可以引入額外的相移。
余弦信號相對于正弦信號的差分相位為
 |
(10) |
其中α差分相移。
求解α引入的誤差會產生誤差項,ε
 |
(11) |
其中α和ε以弧度表示。
大多數旋變器還會在激勵參考信號與正弦和余弦信號之間引入相移,從而導致額外的誤差,ε
 |
(12) |
其中β是正弦/余弦信號和激勵參考信號之間的相移。
通過選擇殘余電壓較小的旋變器,確保以相同的方式處理正弦和余弦信號,并消除參考相移,可以將該誤差降至最低。
在靜態工作條件下,激勵基準和信號線之間的相移不會影響轉換器的精度,但高速旋轉變壓器由于轉子阻抗和目標信號的電抗分量而產生速度電壓。速度電壓僅在速度下發生,而不是在靜態角度下發生,與目標信號正交。它們的最大振幅為

| (13) |
在實際旋轉變壓器中,轉子繞組包括電抗和電阻分量。阻性元件在參考激勵中產生非零相移,當轉子處于高速和靜態時,會出現這種相移。與速度電壓一起,激勵的非零相移產生跟蹤誤差,該誤差近似為
 |
(14) |
為了補償旋變器基準激勵與正弦/余弦信號之間的相位誤差,AD2S1210使用內部濾波的正弦和余弦信號與參考頻率載波同相合成內部參考信號。通過確定正弦或余弦的過零(以較大者為準,以提高相位精度)并評估旋變器基準激勵的相位來生成,它將參考輸入和正弦/余弦輸入之間的相移降低到10°以下,并在±44°的相移下工作。合成參考模塊的框圖如圖7所示。
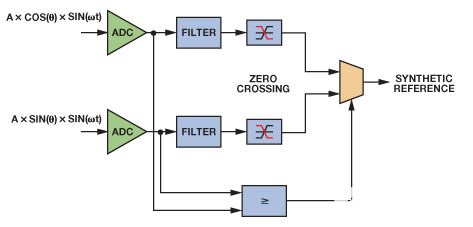
圖7.綜合參考。
與I型跟蹤環路相比,II型跟蹤環路的優勢在于恒定速度時不會發生位置誤差。然而,即使在完全平衡的系統中,加速度也會產生誤差項。加速度引起的誤差量由控制環路響應決定。圖8顯示了AD2S1210的環路響應。
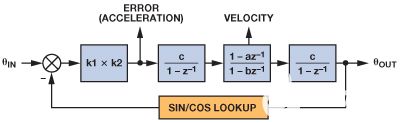
圖8.AD2S1210環路響應
環路加速度常數,K一個是
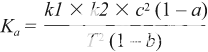
| (15) |
其中,環路系數根據分辨率、輸入信號幅度和采樣周期而變化。AD2S1210在每個CLK期間采樣兩次在時期。
表 3.RDC 系統響應參數
|
參數 |
描述 |
10 位分辨率 |
12 位分辨率 |
14 位分辨率 |
16 位分辨率 |
| K1 |
模數轉換器增益 |
輸入電壓/參考電壓 = (3.15/2)/2.47 (標稱) |
|||
| K2 |
誤差增益 |
12π × 106 |
36π × 106 |
164π × 106 | 132π × 106 |
| 一個 |
補償器 零點系數 |
8187/8192 |
4095/4096 |
8191/8192 | 32,767/32,768 |
| b |
補償器 極系數 |
509/512 |
4085/4096 |
16,359/16,384 | 32,757/32,768 |
| c |
積分器增益 |
1/220 |
1/222 |
1/224 |
1/226 |
| T |
采樣周期 |
1/(CLK在-2k |
|||
加速度引起的跟蹤誤差可以計算為

| (16) |
圖9顯示了不同分辨率設置下由于角度誤差與加速度的關系。
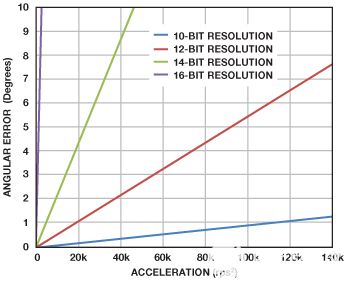
圖9.角度誤差與加速度。
輸入濾波器
為獲得最佳系統精度,可將旋變器輸出直接連接到AD2S1210正弦、余弦、正弦和COSLO引腳,以減少失配或相移。然而,這并不總是可行的。可能需要衰減旋變器的正弦和余弦信號以匹配RDC的輸入規格,由于噪聲環境,可能需要一些信號濾波,并且旋轉變壓器連接器可能需要ESD或短路保護。
圖10顯示了旋變器和AD2S1210之間的典型接口電路。串聯電阻器和二極管提供足夠的保護,以減少外部事件(如ESD或電源或接地短路)的能量。這些電阻和電容實現一個低通濾波器,可降低因驅動電機而耦合到旋變器輸入端的高頻噪聲。可能還需要衰減旋變器的正弦和余弦輸入信號,以符合RDC的輸入電壓規格。這可以通過增加電阻R來實現一個.AD2S1210具有將正弦、正弦、余弦和共弦偏置至V的內部電路裁判/2.這種弱偏置很容易被過度驅動。實現此目的的一種簡單方法是包含 47kΩ 電阻 RB,這會將信號偏置至 2.5 V。
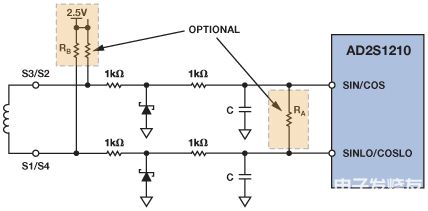
圖 10.接口電路。
激勵緩沖器
通常需要緩沖器來驅動旋變器的低阻抗輸入。該激勵緩沖器可以通過多種方式實現,此處顯示了其中兩種方式。第一個電路通常用于汽車和工業設計,而第二個電路通過用高輸出電流放大器代替標準推挽式架構來簡化設計。
圖11所示的大電流驅動器對基準振蕩器輸出進行放大和電平轉換。該驅動器采用雙通道、低噪聲、精密運算放大器AD8662和一個分立式發射極跟隨器輸出級。重復緩沖電路提供全差分信號以驅動旋變器的初級繞組。
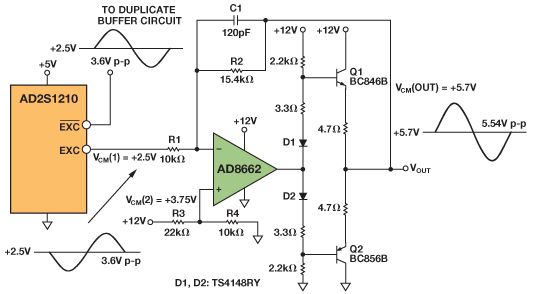
圖 11.高電流基準電壓緩沖器采用帶推挽輸出的運算放大器AD8662。
這種高電流緩沖器提供針對標準旋變器優化的驅動能力、增益范圍和帶寬,并且可以進行調整以滿足應用和傳感器的特定要求,但復雜的設計在元件數量、PCB尺寸、成本和工程時間方面存在許多缺點,需要將其更改為特定應用的需求。
該設計可以通過用放大器代替AD8662來優化,該放大器可提供直接驅動旋變器所需的高輸出電流,從而簡化設計并消除推挽級的需要。
圖12所示的大電流驅動器使用具有軌到軌輸出的大電流雙通道運算放大器AD8397對基準振蕩器輸出進行放大和電平轉換,從而優化與旋變器的接口。AD8397具有低失真、高輸出電流和寬動態范圍特性,非常適合與旋變器配合使用。該器件具有 310mA 電流能力,適用于 32 Ω負載,無需使用傳統的推挽級即可向旋變器提供所需的功率,從而簡化驅動器電路并降低功耗。重復電路提供全差分信號以驅動初級繞組。AD8397采用8引腳SOIC封裝,額定溫度范圍為–40°C至+85°C擴展工業溫度范圍。
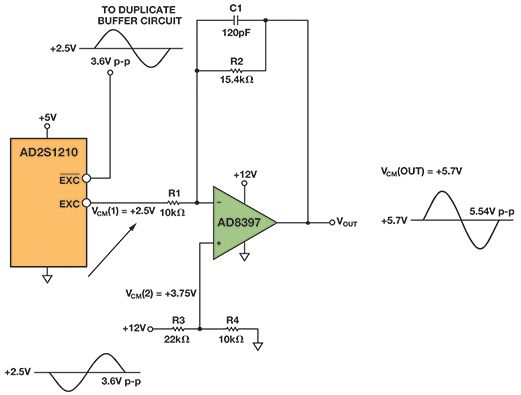
圖 12.基于運算放大器AD8397的大電流基準電壓緩沖器
可以改變無源元件值以改變輸出幅度和共模電壓,輸出幅度由放大器增益R2/R1設置,共模電壓由R3和R4設置。
電容C1和電阻R2構成一個低通濾波器,以最大限度地降低EXC和EXC輸出端的噪聲。應選擇電容器以最小化載波的相移。激勵輸出與正弦和余弦輸入之間的總相移不應超過RDC的鎖相范圍。電容器是可選的,因為經典旋轉變壓器可以很好地濾除高頻成分。
圖13顯示了基準電壓緩沖器AD8397與傳統推挽電路的比較。FFT分析儀測量AD2S1210激勵信號的基波和諧波功率。
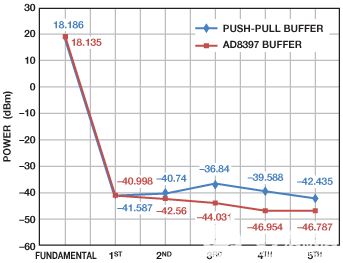
圖 13.AD8397緩沖器與AD8662推挽式緩沖器
兩種配置之間每個基波的功率差異很小,但AD8397緩沖器降低了諧波。雖然AD8397電路的失真略低,但兩個緩沖器都能提供足夠的性能。與傳統電路相比,取消推挽級簡化了設計,占用的空間更小,功耗更低。
結論
當與旋變數字轉換器AD2S1210結合使用時,旋變器可以創建一個高精度、可靠的控制系統,用于電機控制應用中的位置和速度測量。為了實現最佳整體性能,需要基于AD8662或AD8397的緩沖電路來放大激勵信號,并提供旋變器所需的驅動強度。為了完善系統,基本輸入電路可以根據需要提供信號調理。與所有混合信號機電一體化信號鏈一樣,必須注意設計一個考慮所有誤差源的精確系統。AD2S1210具有可變分辨率、基準電壓源生成和片內診斷功能,為旋變器應用提供了理想的RDC解決方案。它有工業級和汽車級可供選擇。
審核編輯:郭婷
-
電動汽車
+關注
關注
156文章
12067瀏覽量
231111 -
變壓器
+關注
關注
159文章
7462瀏覽量
135135 -
轉換器
+關注
關注
27文章
8694瀏覽量
147091
發布評論請先 登錄
相關推薦
RDC旋變數字轉換器電機應用
精密旋變數字轉換器測量角位置和速度
高性能旋變數字轉換器AD2S1210的特點及應用分析

CN0317 用于10位至16位旋變數字轉換器的集成高電流驅動器

CN0276 高性能、10位至16位旋變數字轉換器





 工商網監
工商網監
評論