") ADXL202雙軸加速度計(jì)在與車(chē)速表無(wú)關(guān)的汽車(chē)導(dǎo)航系統(tǒng)中的有用作用
ADXL202雙軸加速度計(jì)在與車(chē)速表無(wú)關(guān)的汽車(chē)導(dǎo)航系統(tǒng)中的有用作用
作者:Peter Shih 和 Harvey Weinberg
在過(guò)去十年中,使用全球定位系統(tǒng)(GPS)的車(chē)輛導(dǎo)航越來(lái)越受到人們的興趣。GPS導(dǎo)航經(jīng)常安裝在當(dāng)今的高端豪華車(chē)和許多商用車(chē)中。由于它們依賴(lài)于來(lái)自衛(wèi)星的高頻無(wú)線(xiàn)電信號(hào),因此配備 GPS 導(dǎo)航系統(tǒng)的車(chē)輛可能會(huì)在短時(shí)間內(nèi)丟失 GPS 信號(hào)。通過(guò)適當(dāng)?shù)?a href="http://www.1cnz.cn/v/tag/2562/" target="_blank">算法,GPS可以與其他航向繪圖技術(shù)集成,為用戶(hù)提供持續(xù)準(zhǔn)確的導(dǎo)航信息。
航位(演繹)推算是車(chē)輛導(dǎo)航中廣泛使用的一種方法。它利用三個(gè)不同的輸入來(lái)預(yù)測(cè)位置:一組起始坐標(biāo)、行進(jìn)方向和行進(jìn)速度。由于其相對(duì)定位方案,其精度受到限制;絕對(duì)位置誤差與行進(jìn)距離成正比。非 GPS 車(chē)輛導(dǎo)航的其他方法包括地圖匹配、慣性導(dǎo)航和 Delta A 測(cè)量。地圖匹配基于以下原則:如果您在道路附近或與之平行行駛,則很有可能您確實(shí)在該道路上(在人口稠密的地區(qū)可能無(wú)法正常工作)。慣性導(dǎo)航依靠加速度計(jì)來(lái)推導(dǎo)出速度作為加速度的積分。在Delta A測(cè)量中,隨后從接收器恢復(fù)的GPS信號(hào)與來(lái)自非GPS系統(tǒng)的輸入相關(guān)聯(lián)。這種方法可以校正加速度計(jì)的不準(zhǔn)確性,例如噪聲和溫度/時(shí)間上的零g偏移。這些技術(shù)中的一種以上可以與GPS結(jié)合使用,以更準(zhǔn)確地顯示位置。
雖然使用汽車(chē)安裝的速度表會(huì)有所幫助,但會(huì)出現(xiàn)某些困難。通常,車(chē)速表信息不可用,因?yàn)樗鼪](méi)有總線(xiàn)傳輸?shù)桨l(fā)動(dòng)機(jī)/ABS/穩(wěn)定性控制計(jì)算機(jī)之外的系統(tǒng)。由于在許多情況下它被認(rèn)為是“安全關(guān)鍵”的,因此速度表輸出不會(huì)連接到任何可能使總線(xiàn)癱瘓的東西。此外,GPS系統(tǒng)通常由第三方構(gòu)建,他們可能希望構(gòu)建具有廣泛潛在市場(chǎng)的通用產(chǎn)品。正是在此類(lèi)應(yīng)用中,ADXL202雙軸加速度計(jì)可用于為導(dǎo)航系統(tǒng)開(kāi)發(fā)精確的速度估計(jì)。數(shù)字羅盤(pán)或陀螺儀與加速度計(jì)結(jié)合使用,以確定大致的行進(jìn)方向。然后,導(dǎo)航系統(tǒng)(結(jié)合上述其他方法)轉(zhuǎn)換信息,以確定相對(duì)于信號(hào)丟失點(diǎn)的位置。
這里描述的確定速度的方法使用加速度計(jì)來(lái)感知前輪和后輪遇到道路顛簸(直行時(shí))的時(shí)間間隔。無(wú)論是在當(dāng)?shù)氐缆愤€是高速公路上行駛,道路上總會(huì)有瑕疵。這些缺陷轉(zhuǎn)化為顛簸和顛簸,立即被汽車(chē)的車(chē)輪感知,最終被乘客感知。為了通過(guò)感應(yīng)這些顛簸來(lái)跟蹤速度,加速度計(jì)用于識(shí)別它們的幅度和時(shí)間。因此,對(duì)于具有給定軸距 (W) 的汽車(chē),間隔 (T1) 對(duì)于兩個(gè)車(chē)軸遇到顛簸,可以使用以下等式計(jì)算汽車(chē)行駛的速度:(見(jiàn)圖 1。
速度 [英里/小時(shí)] = (W [英尺]/T1 [秒]) * (3600 秒/小時(shí))/(5280 英尺/英里)。
速度 [公里/小時(shí)] = (W [米]/T1 [秒]) * (3600 秒/小時(shí))/(1000 米/公里)。
示例數(shù)據(jù)日志
Mxx= 凸起幅度(占空比 %)
txx= 顛簸的瞬時(shí)時(shí)間(秒)
Tx= 兩個(gè)相關(guān)凸起之間的持續(xù)時(shí)間(秒)
S0= 前一個(gè)有效速度 (mph)
S1= 當(dāng)前計(jì)算速度(英里/小時(shí))
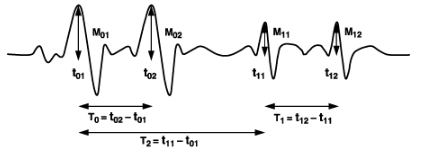
圖1.速度測(cè)量的事件計(jì)時(shí)。
在記錄當(dāng)?shù)氐缆飞系湫托旭偲陂g的數(shù)據(jù)以開(kāi)發(fā)實(shí)驗(yàn)信息時(shí),加速度計(jì)不容易區(qū)分汽車(chē)懸架系統(tǒng)中的反彈和振動(dòng)以及由道路不規(guī)則引起的尖峰對(duì)。因此,需要一個(gè)過(guò)濾系統(tǒng)來(lái)隔離凸起。ADXL202EB-232評(píng)估板內(nèi)置軟件,可通過(guò)低通濾波對(duì)數(shù)據(jù)進(jìn)行平滑處理。這提供了識(shí)別道路顛簸并在計(jì)算中使用它們的更好機(jī)會(huì)。這個(gè)問(wèn)題解決了,就出現(xiàn)了一個(gè)相關(guān)性問(wèn)題——例如,如果有兩個(gè)相似的顛簸相距不到一輛車(chē)的長(zhǎng)度,那么很難理解汽車(chē)在短時(shí)間內(nèi)經(jīng)歷的四個(gè)總顛簸。因此,有必要提出一種算法來(lái)將數(shù)據(jù)點(diǎn)干凈地轉(zhuǎn)換為有效的速度表讀數(shù)。
如果加速度計(jì)放置在車(chē)軸之間的中間位置,X軸平行于地球表面并直接瞄準(zhǔn)地球表面,Y軸垂直于地球表面,則前輪和后輪產(chǎn)生的顛簸脈沖的大小大致相等(在一定程度上取決于車(chē)輛的懸架系統(tǒng))。為了識(shí)別顛簸對(duì),有必要進(jìn)行幅度比較以匹配源自前后軸的顛簸。同時(shí),必須將當(dāng)前表格速度與最后有效速度進(jìn)行比較,以確定當(dāng)前計(jì)算的速度是否可行。例如,如果車(chē)輛在大約一秒鐘前以 25 英里/小時(shí)的速度行駛,那么當(dāng)前速度極不可能達(dá)到 45 英里/小時(shí)或更高。因此,通過(guò)使用時(shí)序和速度比較,任何沒(méi)有意義的輸出都將被合理化或忽略。
數(shù)據(jù)分析。ADXL202的數(shù)字輸出經(jīng)過(guò)占空比調(diào)制;導(dǎo)通時(shí)間與加速度成正比。50% 占空比(方波輸出)表示標(biāo)稱(chēng)加速度為 0g;比例因子為每 g 加速度占空比變化±12.5%。這些標(biāo)稱(chēng)值受器件初始容差的影響,包括零g失調(diào)誤差和靈敏度誤差。
在這里描述的應(yīng)用中,50%的占空比輸出對(duì)應(yīng)于完全平穩(wěn)的行駛——加速度計(jì)沒(méi)有檢測(cè)到顛簸或振動(dòng)。一般來(lái)說(shuō),由于其懸架動(dòng)力學(xué),車(chē)輛在較低速度下對(duì)顛簸的反應(yīng)更靈敏。因此,對(duì)于較低的速度,需要降低對(duì)顛簸大小的敏感性(Mxx),閾值水平可以更高。小于閾值水平的量級(jí)將被視為無(wú)效數(shù)據(jù),而高于閾值(有效量級(jí))的量級(jí)將進(jìn)入下一階段的過(guò)濾。
下一階段的目的是阻止兩個(gè)相鄰顛簸所暗示的不可行的速度,這兩個(gè)顛簸比車(chē)輛的軸距更近。為了解決這個(gè)問(wèn)題,如果 S1與 S0 相比,(定義如下)超出了 20 mph/s 的一般加速限制,則數(shù)據(jù)集無(wú)效。但是,四個(gè)凸塊的配置可以通過(guò)配對(duì)第一個(gè)和第三個(gè)凸塊以及第二個(gè)和第四個(gè)凸塊轉(zhuǎn)換為合法速度(圖 2)。
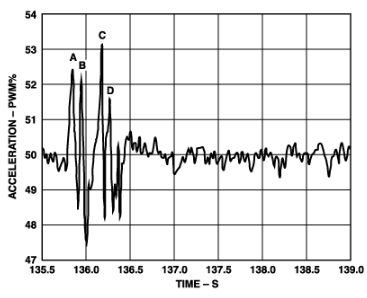
圖2.X軸(前后),平行于地球表面
答:M01= 52.41%, t01= 135.862秒
B: M11= 52.15%, t11= 135.938s
C: M02 = 53.08%, t02 = 136.179s
D: M12= 51.66%,t12 = 136.242s
圖2顯示了ADXL202EB在以20 mph恒定速度行駛的汽車(chē)中記錄的最新數(shù)據(jù)。乍一看,似乎A和B是兩個(gè)相關(guān)的凸起,以及C和D。然而,t11– 噸01= 0.076 秒,換算成大約 81 英里/小時(shí)的速度。這將與使用Delta A測(cè)量方法的最后一個(gè)有效速度進(jìn)行比較,并將否定A和B的相關(guān)性。然后 A 和 C 配對(duì):t02– 噸01= 0.317 秒,B 和 D (0.304 秒)也是如此,它們分別轉(zhuǎn)化為大約 19.4 英里/小時(shí)和 20.2 英里/小時(shí)的速度。根據(jù)公式 1 和 9 英尺軸距,Tx對(duì)于 20 英里/小時(shí)等于 0.307 秒。這里的結(jié)果分別顯示3.2%和1%的差異。
這個(gè)簡(jiǎn)單的解決方案處理最常見(jiàn)的錯(cuò)誤讀數(shù)來(lái)源。但是,當(dāng)然還有許多其他凸塊配置可能會(huì)導(dǎo)致速度讀數(shù)錯(cuò)誤。其中許多可以通過(guò)越來(lái)越聰明的算法和信號(hào)調(diào)理來(lái)解決,但最終,人們必須意識(shí)到,這種計(jì)算是替代GPS信號(hào)暫時(shí)丟失的系統(tǒng)的一部分,旨在在短時(shí)間內(nèi)保持合理的精度。
哪個(gè)軸?可以考慮使用 X 軸或 Y 軸(或兩者)作為加速度數(shù)據(jù)來(lái)測(cè)量道路上的顛簸。Y軸(垂直)測(cè)量實(shí)際大小,由汽車(chē)的懸架系統(tǒng)動(dòng)力學(xué)修改(并且經(jīng)常混淆),而X軸測(cè)量汽車(chē)經(jīng)過(guò)顛簸時(shí)前后加速度分量(加速度計(jì)交叉軸)的大小。
第一種方法(圖3)測(cè)量Y軸加速度(垂直于地球表面)。在沒(méi)有顛簸的情況下,測(cè)量值將為1 g,由地球的靜態(tài)引力確定。標(biāo)稱(chēng) 62.5% 輸出 (50% + 12.5%/g) 可以偏移為 50%,作為正或負(fù)垂直撓曲力的起點(diǎn)。
第二種方法(如圖2所示)使用X軸(平行于地球表面)來(lái)測(cè)量前后加速度。在無(wú)顛簸的情況下,測(cè)量值將為 0 g。由于汽車(chē)的運(yùn)動(dòng)受到顛簸的影響,而加速度計(jì)會(huì)拾取 Y 軸加速度峰值,該峰值被汽車(chē)的懸架系統(tǒng)強(qiáng)烈過(guò)濾。同時(shí),由于顛簸引起的前后運(yùn)動(dòng)(以及加速度計(jì)的跨軸靈敏度),X軸還拾取了該加速度峰值中更小但“更干凈”的前向分量。在試運(yùn)行期間,后一種方法(圖2)給出了更好的結(jié)果。
這種方法有助于過(guò)濾掉不需要的噪音。此外,在圖 3 中可以看到,在遇到顛簸時(shí),加速度的垂直分量往往顯示出相當(dāng)?shù)偷淖枘嵯禂?shù)。依靠前后運(yùn)動(dòng)可以克服這些復(fù)雜性。
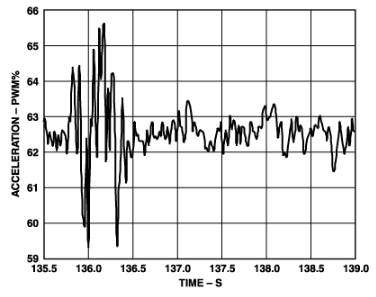
圖3.Y(垂直)軸,垂直于地球表面。
本文所述的試驗(yàn)是在個(gè)人計(jì)算機(jī)上使用ADXL202EB-232評(píng)估板和Crossbow軟件進(jìn)行的。以下是該過(guò)程及其流程圖的分步說(shuō)明(圖 4)。
將ADXL202EB-232連接到串行電纜,然后連接到計(jì)算機(jī)的RS-232端口。
打開(kāi)Crossbow提供的軟件程序X-Analyze。
單擊“添加連接”,然后選擇“COM1上的ADXL202-EB-232A”。
點(diǎn)擊“配置連接”;然后點(diǎn)擊“校準(zhǔn)”。
要進(jìn)行校準(zhǔn),請(qǐng)按住 XY 平面垂直于地面的電路板,然后將電路板圍繞該平面旋轉(zhuǎn) 360 度。
選擇更新速率盡可能快,記錄速率為50 Hz;選擇過(guò)濾速率為 1。
選擇日志記錄文件夾;這是保存.txt日志文件的位置。
點(diǎn)擊“保存并退出”。
將電路板安裝/連接到車(chē)輛上,Y 軸朝向車(chē)輛底部,X 軸正前方。確保電路板安裝牢固,以便在顛簸時(shí)不會(huì)相對(duì)于車(chē)身移動(dòng)。
準(zhǔn)備好記錄數(shù)據(jù)時(shí)單擊“記錄所有連接”。
記錄數(shù)據(jù)后,相同的按鈕用于“停止日志記錄”。
打開(kāi).txt文件并復(fù)制并粘貼到Excel上以創(chuàng)建圖表/圖形。
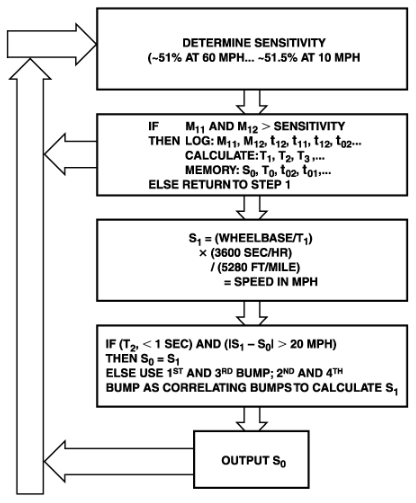
圖4.計(jì)算流程圖。
審核編輯:郭婷
-
加速度計(jì)
+關(guān)注
關(guān)注
6文章
703瀏覽量
45922
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
基于加速度計(jì)的無(wú)陀螺慣性導(dǎo)航系統(tǒng)的研究
雙軸加速度傳感器ADXL202及其應(yīng)用設(shè)計(jì)
具有數(shù)字信號(hào)輸出的雙軸加速度傳感器ADXL202
什么是雙軸加速度傳感器ADXL202?有哪些應(yīng)用?
三軸加速度計(jì)ADXL330的特點(diǎn)應(yīng)用分析
ADXL202雙軸表面微機(jī)械加速度計(jì)的結(jié)構(gòu)特點(diǎn)與應(yīng)用
ADXL202E-低成本±2G雙軸加速度計(jì),帶占空比輸出數(shù)據(jù)表

ADXL202/ADXL210:低成本±2 g/±10 g雙軸IMEMS<sup>?</sup>數(shù)字輸出加速度計(jì)過(guò)時(shí)數(shù)據(jù)表
ADXL202ADXL210低成本±2 g±10 g雙軸IMEMS?加速度計(jì),數(shù)字輸出過(guò)時(shí)數(shù)據(jù)表
雙軸、低g、完全集成的加速度計(jì)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論