") 淺析ADAS域控制器關(guān)鍵組件
淺析ADAS域控制器關(guān)鍵組件
在CPU選型上,各家域控制器為達(dá)到NOP/NGP等L2+級高階ADAS功能,均在追求大算力芯片,目前應(yīng)用較多的是英偉達(dá)Xavier和Orin。英偉達(dá)的Xavier和Orin都內(nèi)置立體雙目硬核加速,可以直接硬線輸出視差圖(Disparity map),還有光流加速模塊,立體雙目的光流效果比單目好很多,對立體雙目企業(yè)來說,最核心的軟件資產(chǎn)是立體匹配算法,大部分都是半全局匹配,但要真做的好,需要長時間摸索。
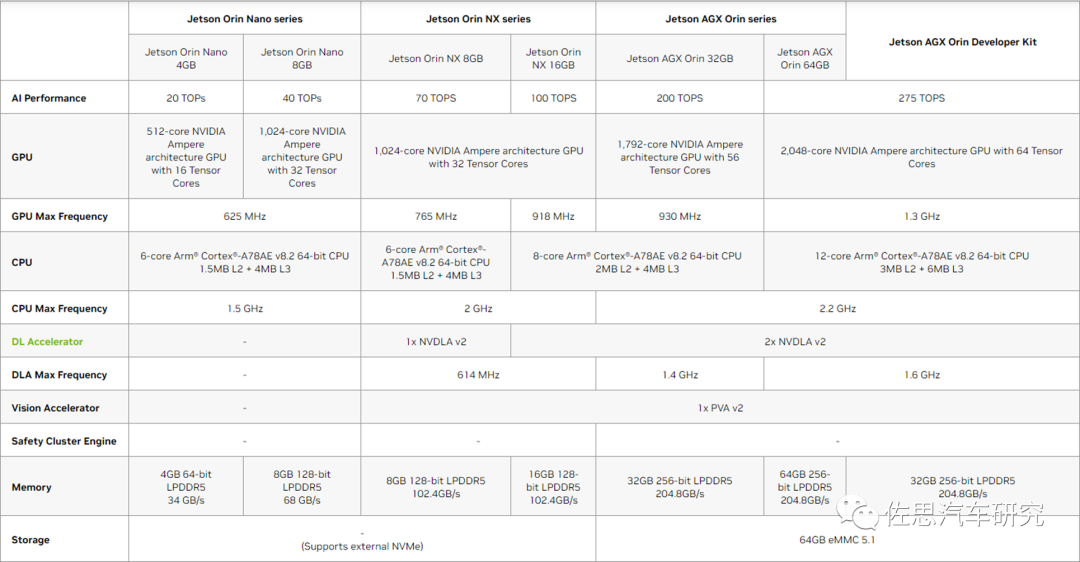
英偉達(dá)Orin芯片基本參數(shù),圖片來源:NVIDA官網(wǎng)
深度圖的計算主要是CPU的工作。深度圖之后是自由空間(Freespace)計算,主要由GPU負(fù)責(zé)。
域控制器里的MCU
一般來說,ADAS域控制器用的MCU都是由英飛凌或NXP提供,特別是英飛凌的TC297X/397X系列,市場占有率很高。瑞薩、英飛凌和NXP的主流MCU都達(dá)到ASIL-D級標(biāo)準(zhǔn),如大疆ADAS域控制器工程樣機(jī)的MCU采用德州儀器TMS570LC4357,該芯片2014年推出,未通過ASIL認(rèn)證,只有AEC Q-100認(rèn)證。
2024年下半年,英飛凌計劃開始量產(chǎn)采用28nm技術(shù)工藝的新AURIX TC4xx。AURIX TC4xx系列微控制器主要面向大量數(shù)據(jù)吞吐類應(yīng)用,如高級輔助駕駛系統(tǒng)、各個域控制器、新能源和網(wǎng)關(guān)系統(tǒng)等。
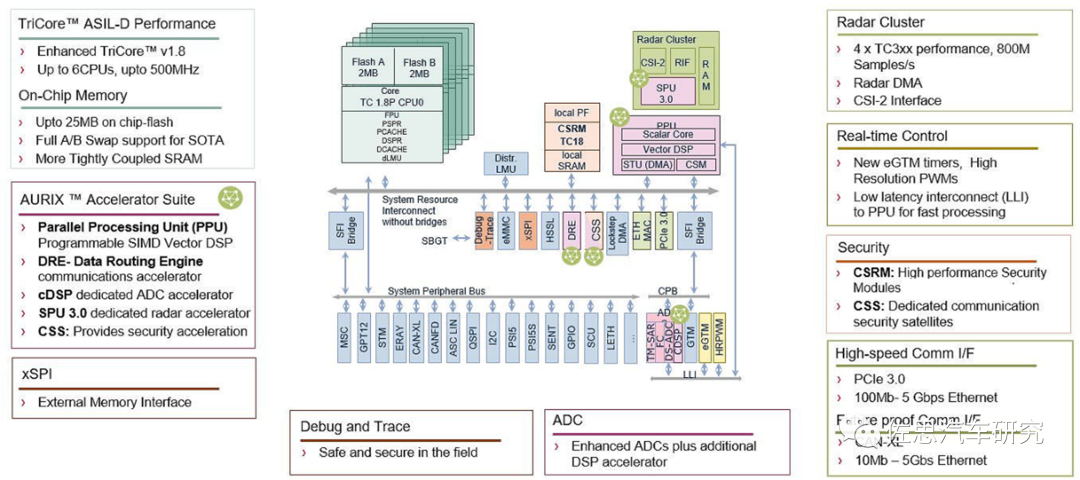
英飛凌TC4xx架構(gòu)圖,圖片來源:英飛凌官網(wǎng)
MCU非常重要,這是保證域控制器達(dá)到ASIL-C/D級認(rèn)證最重要的一環(huán)。
ADAS域控制器需要豐富的接口(視頻接口、以太網(wǎng)接口、CAN接口等)來連接各種傳感器設(shè)備,如:攝像頭、激光雷達(dá)、毫米波雷達(dá)、超聲波雷達(dá)、組合導(dǎo)航、IMU以及V2X模塊等。攝像頭接口一般采用GMSL、LVDS、FPDLink等協(xié)議,毫米波雷達(dá)一般采用CAN/FD通訊,而激光雷達(dá)需要上傳大量的數(shù)據(jù)多采用以太網(wǎng)接口。
在大疆ADAS域控制器載板MCU上方是兩個以太網(wǎng)交換機(jī),即Marvell的88EA6321,左邊是一個硬盤SATA接口,用Marvell的88SE9171芯片將SATA轉(zhuǎn)換為PCIe接口,絕大部分開發(fā)板都不帶SATA接口,一般都用USB接口。88SE9171旁邊還有一個臺灣華邦Winbond的W25Q64JV,這是一個NOR Flash,容量為64Mb,應(yīng)該是存儲了簡單的硬盤驅(qū)動程序。
Marvell第一代車載以太網(wǎng)交換機(jī)88EA6321,是7端口以太網(wǎng)千兆性能交換機(jī),充分符合IEEE802.3車載標(biāo)準(zhǔn),支持AVB(音頻/視頻橋接功能),并支持低能耗以太網(wǎng),可降低功耗。該款7端口以太網(wǎng)交換機(jī)集成了2個IEEE 10/100/1000BASE-T/TX/T端口、2個RGMII/xMII(這2個端口可配置成1個 GMII)端口和1個SGMII/SerDes端口。該交換機(jī)提供遠(yuǎn)程管理功能,可輕松連接和配置該設(shè)備。它通常是在主處理器和MCU之間的橋梁,也就是英偉達(dá)Xavier和德州儀器TMS570LC4357。
88EA6321是Marvell早期產(chǎn)品,目前Marvell的以太網(wǎng)交換器已經(jīng)演進(jìn)到第三代,不過Marvell比較先進(jìn)的產(chǎn)品通常只和大廠合作。88EA6321目標(biāo)市場是對安全要求不太高的場合,如車身控制器、Infotainment控制器和網(wǎng)關(guān)。最高也只支持1G,雖然特斯拉也在用這顆芯片,即使大眾這樣的傳統(tǒng)車廠的新產(chǎn)品不會用如此低帶寬的交換機(jī),目前最先進(jìn)的設(shè)計,最高已經(jīng)支持10G,也就是千兆以太網(wǎng),一般也支持到2.5G。
某些點云密度高的激光雷達(dá),峰值速率可能會超過每秒100M,88EA6321不適合接點云密度高的激光雷達(dá)(用CAN更不可能了,CAN最高可用的只有0.5M帶寬),而目前主流的毫米波雷達(dá)都是CAN或CAN-FD接口,極少數(shù)4D毫米波雷達(dá)可選以太網(wǎng)輸出,默認(rèn)一般是CAN-FD。
存儲
與消費電子領(lǐng)域相同,車端開始規(guī)模化采用LPDDR DRAM、UFS、eMMC等高速存儲器件,以滿足ADAS域控制器的系統(tǒng)、軟件級算法對數(shù)據(jù)傳輸與存儲需求。目前,主流域控制器存儲組合主要采用“LPDDR+UFS”的形式,與手機(jī)端存儲組合一致。
域控用存儲,美光走在了行業(yè)前列。其在2021年6月,美光推出首款車用UFS 3.1內(nèi)存設(shè)備產(chǎn)品組合,更具成本/密度優(yōu)勢。美光UFS 3.1的數(shù)據(jù)讀取性能是上一代 UFS 2.1的兩倍,連續(xù)寫入性能提高了50%,可滿足3級以上ADAS系統(tǒng)和黑匣子應(yīng)用中不斷增長的傳感器和攝像頭數(shù)據(jù)對于實時本地存儲的需求。理想L9 ADAS域控制器,便搭載了美光車規(guī)級LPDDR5 DRAM內(nèi)存和基于3D TLC NAND技術(shù)的UFS 3.1存儲芯片。截至目前,美光LPDDR5是業(yè)界唯一一款獲得汽車安全完整性等級ASIL-D認(rèn)證的內(nèi)存產(chǎn)品。 隨著車輛智能駕駛輔助等級提高,及高速/城市NGP、自動泊車AVP等功能的逐步應(yīng)用,將進(jìn)一步帶動車規(guī)DRAM容量、帶寬及產(chǎn)品要求。
容量方面,根據(jù)美光的數(shù)據(jù),L1/2級汽車單車DRAM容量需求約8GB,L3級和L5級則分別提升至16GB和74GB。
帶寬方面,L2級DRAM帶寬一般為25-50GB/s,L3級時帶寬可達(dá)200GB/s,L4級之后帶寬將提升至1TB/s。
產(chǎn)品方面,L2級主要采用基礎(chǔ)的DDR2/DDR3,現(xiàn)階段L2開始向L3升級,DRAM也將逐步往DDR4/LPDDR4/LPDDR5/GDDR5切換。
UFS層面,UFS由JEDEC特別定義為e-MMC的高性能存儲器替代品。它已經(jīng)成為主要的智能手機(jī)解決方案,并持續(xù)遷移到車載應(yīng)用和其他應(yīng)用當(dāng)中。UFS最終將超越e-MMC,成為主要的車載應(yīng)用存儲解決方案。
解串行
解串行的代表型號是德州儀器的DS90UB960。360全景魚眼鏡頭環(huán)視通常由Infotainment完成,環(huán)視的有效距離一般都在10米內(nèi),不可能做遠(yuǎn)距離的ADAS,一般只用來泊車,ADAS域控制器不考慮360環(huán)視,再說,一個DS90UB960足以對應(yīng)4個360環(huán)視圖像傳感器。
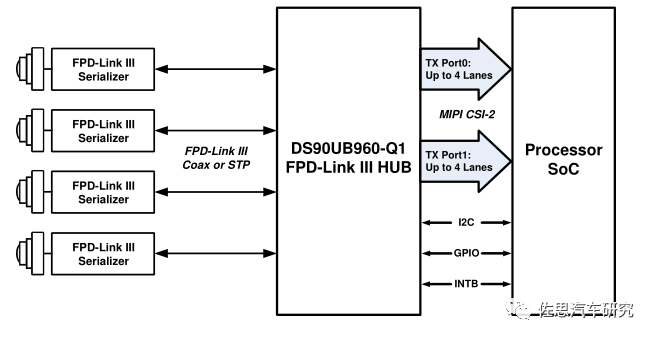
DS90UB960典型應(yīng)用圖,圖片來源:德州儀器
上圖是德州儀器DS90UB960的典型應(yīng)用圖,即接4個200萬像素幀率30Hz的YUV444數(shù)據(jù),或者4個200萬像素幀率60Hz的YUV420數(shù)據(jù),后者可能性更大。DS90UB954是DS90UB960簡化版,從4Lane減少到2Lane。與之配套的一般是DS90UB953。推測特斯拉的車內(nèi)駕駛員狀態(tài)監(jiān)測用這顆芯片,因為攝像頭的LVDS輸出不適合遠(yuǎn)距離傳送,基本上攝像頭都要配備一個解串行芯片,將并行數(shù)據(jù)轉(zhuǎn)換為串行用同軸或STP傳輸,這樣傳輸距離遠(yuǎn)且EMI電磁干擾更容易過車規(guī)。
這里需要說明一下攝像頭的數(shù)據(jù)格式,通常由RAW RGB、YUV兩種。YUV常見的有三種級YUV444,YUV422和YUV420。計算帶寬的公式對RAW RGB來說是像素×幀率×比特×4,比如一款攝像頭輸出30Hz,200萬像素,那么帶寬是200萬x30x8x4,即1.92Gbps,這個帶寬太寬了。YUV444是像素×幀率×比特×3,即1.44Gbps,YUV422是像素×幀率×比特×2,即0.96Gbps,YUV420是像素×幀率×比特×1.5,即0.72Gbps。ADAS通常對色彩考慮不多,YUV420足夠。除車載外一般多采用YUV422。
審核編輯:劉清
-
mcu
+關(guān)注
關(guān)注
146文章
17135瀏覽量
351019 -
gpu
+關(guān)注
關(guān)注
28文章
4729瀏覽量
128900 -
lvds
+關(guān)注
關(guān)注
2文章
1043瀏覽量
65798 -
ADAS系統(tǒng)
+關(guān)注
關(guān)注
4文章
226瀏覽量
25691 -
域控制器
+關(guān)注
關(guān)注
0文章
248瀏覽量
2641
原文標(biāo)題:ADAS域控制器關(guān)鍵組件趨勢分析
文章出處:【微信號:zuosiqiche,微信公眾號:佐思汽車研究】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
數(shù)明半導(dǎo)體參與起草車身域控制器測試方法團(tuán)體標(biāo)準(zhǔn)
區(qū)域控制器電源負(fù)載的智能調(diào)度

面向汽車T-BOX與域控制器的HIL測試新方案
通過電壓轉(zhuǎn)換啟用下一代ADAS域控制器應(yīng)用說明

使用邏輯和轉(zhuǎn)換優(yōu)化ADAS域控制器
Arm Cortex-R82AE賦能高性能區(qū)域控制器設(shè)計
裕太微電子在SerDes車載高速視頻傳輸芯片領(lǐng)域獲得突破,獲客戶認(rèn)可

榮威RX5智能駕駛域控制器方案

汽車區(qū)域控制器架構(gòu)趨勢下的SmartFET應(yīng)用
淺析ADAS域控制器技術(shù)
座艙域控制器硬件架構(gòu)方案:SoC + MCU
智駕、座艙、泊車三合一域控制器解析

關(guān)于域控制器的基礎(chǔ)知識分享
上汽飛凡R7智聯(lián)域控制器模塊TBOX的拆解分析






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論