

相機(jī)和鏡頭是機(jī)器視覺中重要的組成部分,合適的相機(jī)和鏡頭決定了系統(tǒng)的好壞。本文介紹如何選擇相機(jī)與對(duì)應(yīng)的鏡頭。
相機(jī)成像原理
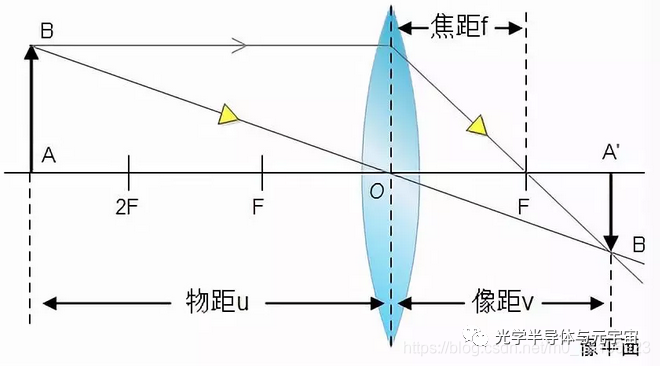
凸透鏡成像有幾個(gè)關(guān)鍵的點(diǎn)需要記住:
1物距大于2倍焦距以外,實(shí)像;
物距等于2倍焦距,實(shí)像;
物距在1到2倍焦距之間,實(shí)像;
物距等于1倍焦距,不成像;
物距在1倍焦距以內(nèi),虛像。
圖像分辨率、系統(tǒng)分辨率和像素分辨率
圖像分辨率、系統(tǒng)分辨率和像素分辨率是機(jī)器視覺系統(tǒng)設(shè)計(jì)時(shí)較常見的參數(shù),它們通常與客戶對(duì)機(jī)器視覺系統(tǒng)的需求關(guān)系最為密切,是選擇相機(jī)和鏡頭的重要依據(jù)。
圖像分辨率指圖像中存儲(chǔ)的信息量,是每英寸圖像內(nèi)有多少個(gè)像素點(diǎn),分辨率的單位為PPI(Pixels Per Inch),通常叫做像素每英寸。圖像分辨率一般被用于PS中,用來改變圖像的清晰度。
系統(tǒng)分辨率指成像系統(tǒng)可以識(shí)別出監(jiān)測(cè)目標(biāo)的最小細(xì)節(jié)或最小特征。諸如“要求系統(tǒng)能檢測(cè)0.1mm的目標(biāo)"、"要求系統(tǒng)測(cè)量精度達(dá)到0.01mm"之類的要求一般都和系統(tǒng)分辨率相關(guān)。
像素分辨率指為了表示檢測(cè)目標(biāo)所需要的像素?cái)?shù)。一般情況下,可以根據(jù)客戶對(duì)檢測(cè)目標(biāo)中最小特征的要求來確定最小像素分辨率。如果將整個(gè)圖像看作周期為最小特征大小的周期信號(hào),則根據(jù)奈奎斯特采樣定律,必須對(duì)信號(hào)每個(gè)周期采樣2個(gè)點(diǎn)以上,才能完整恢復(fù)該信號(hào)。因此如果客戶沒有特別要求,常用至少兩個(gè)像素來代表檢測(cè)目標(biāo)中的最小特征,這可被看作是圖像傳感器的奈奎斯特定律。
圖像傳感器應(yīng)具備的最小像素分辨率常通過下面的公式計(jì)算:
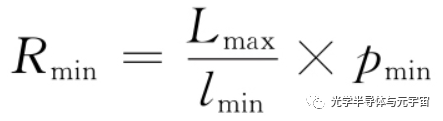
Rmin為最小像素分辨率。
Lmax為檢測(cè)目標(biāo)的最大長度。
lmin為檢測(cè)目標(biāo)的最小特征長度(視覺系統(tǒng)的分辨率)。
pmin為表示最小特征的像素?cái)?shù)。
在無特別要求時(shí),pmin=2,如果客戶要求使用多于2像素來表示最小特征,則最小分辨率將適當(dāng)增加。
視場(chǎng)
視場(chǎng)(Field of View,F(xiàn)OV)指成像系統(tǒng)中圖像傳感器可以監(jiān)測(cè)到的最大區(qū)域。在機(jī)器視覺系統(tǒng)設(shè)計(jì)時(shí),考慮到一般都會(huì)使被檢測(cè)目標(biāo)盡量填滿整視場(chǎng),因此常用視場(chǎng)大小代替目標(biāo)的最大長度Lmax來計(jì)算視覺系統(tǒng)的像素分辨率。如下圖(a)所示,表示被檢測(cè)目標(biāo)在水平方向上占據(jù)整個(gè)視場(chǎng),而圖(b)表示目標(biāo)未填滿視場(chǎng)。
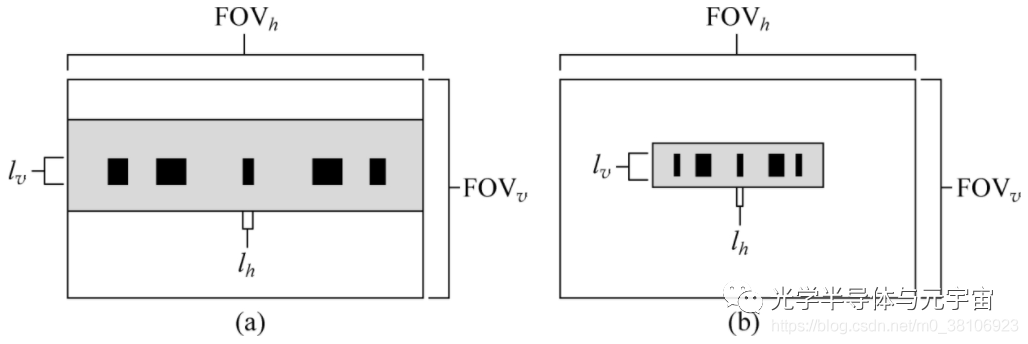
如果橫縱方向上視場(chǎng)大小為[FOVh,F(xiàn)OVv],檢測(cè)目標(biāo)的最小特征的大小為[Ih,lv],則圖像傳感器應(yīng)具有的最小像素分辨率為:

成像系統(tǒng)視場(chǎng)的大小可以通過研究其成像規(guī)律得知。目前,機(jī)器視覺系統(tǒng)常用使用配備各種鏡頭系統(tǒng)的工業(yè)CCD/CMOS相機(jī)作為成像系統(tǒng),透鏡成像示意圖如下所示:
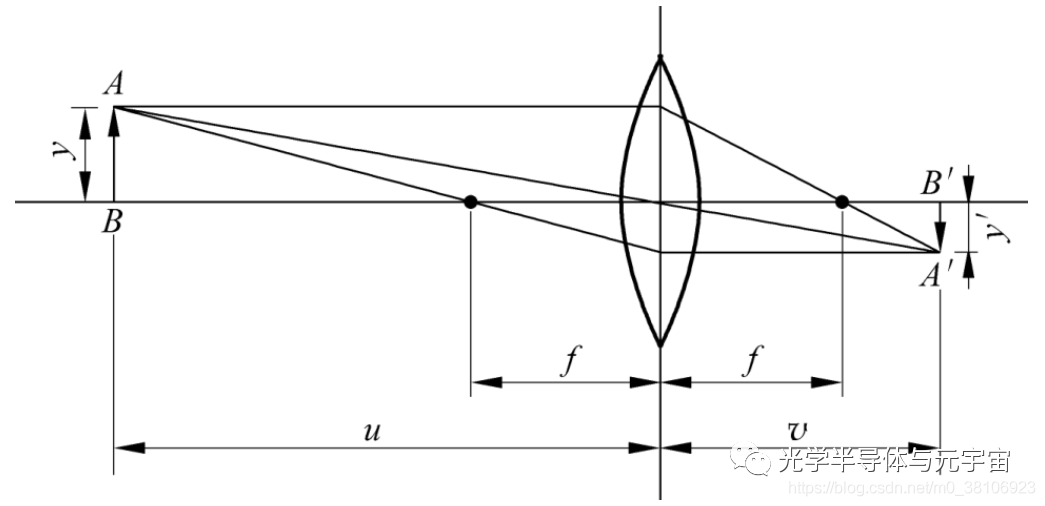
鏡頭系統(tǒng)一般使用透鏡系統(tǒng),其成像遵循高斯成像公式:
f為透鏡焦距(focal length,凸正凹負(fù))。
u為物距。
v為像距(實(shí)正虛負(fù))。如下圖所示。通常將像距與物距的比值定義為透鏡的放大率M:
鏡頭系統(tǒng)簡(jiǎn)化模型
由于對(duì)機(jī)器視覺成像系統(tǒng)來說,相機(jī)鏡頭到所檢測(cè)目標(biāo)的距離(稱為工作距離,相當(dāng)于物距)相對(duì)于相機(jī)焦距可近似認(rèn)為是無窮遠(yuǎn)。若將其帶入高斯成像公式,可得出此時(shí)相機(jī)像距近似等于其焦距,也就是說相機(jī)成像在焦平面上。據(jù)此,可以將鏡頭系統(tǒng)抽象為類似小孔成像的簡(jiǎn)化模型,如下圖所示:
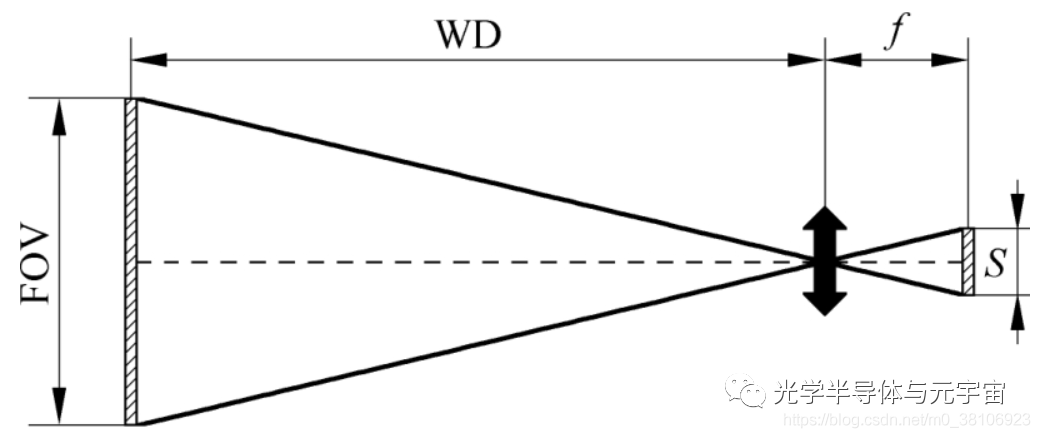
根據(jù)該簡(jiǎn)化模型,可以得出機(jī)器視覺系統(tǒng)圖像傳感器尺寸S(傳感器平面某個(gè)方向上的長度)、視場(chǎng)FOV、工作距離WD及鏡頭焦距f之間的約束關(guān)系:
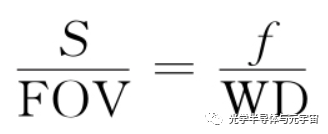
此時(shí),M則可以等效為:
如果進(jìn)一步將前述最小像素分辨率的計(jì)算公式與該約束關(guān)系結(jié)合(用視場(chǎng)FOV代替目標(biāo)的最大長度Lmax),則可以得出以下成像系統(tǒng)簡(jiǎn)化模型的參數(shù)約束關(guān)系:

該公式所顯示的參數(shù)間的相互約束關(guān)系是機(jī)器視覺系統(tǒng)設(shè)計(jì)和搭建部署時(shí)系統(tǒng)設(shè)計(jì)和設(shè)備選型的基礎(chǔ)。
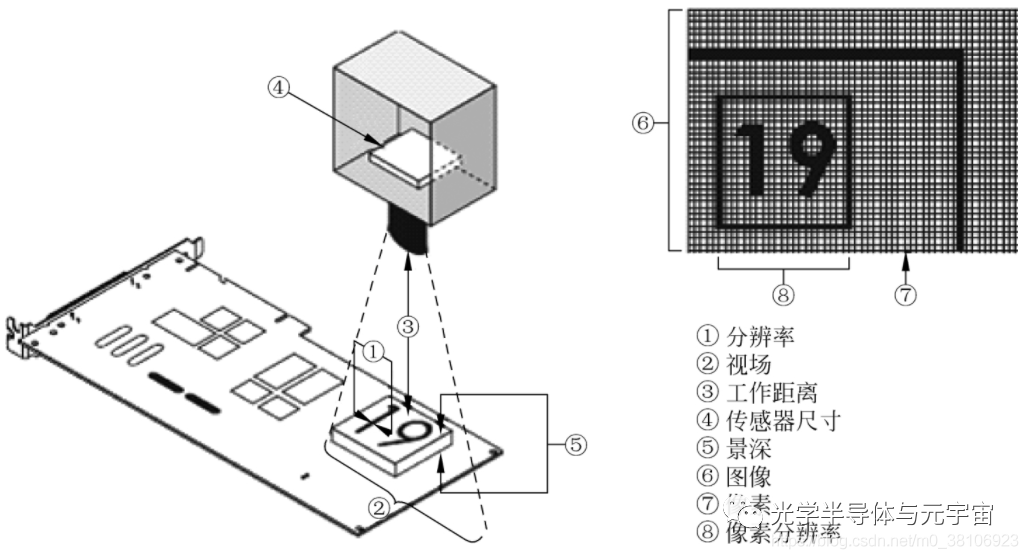
實(shí)際中傳感器尺寸S可以通過查詢相機(jī)的技術(shù)規(guī)范獲知,焦距f、工作距離WD直接由所選擇的鏡頭決定。在已知這些參數(shù)時(shí),可以很容易地計(jì)算出視場(chǎng)FOV。相機(jī)的像素分辨率由其有效像素區(qū)域(即傳感器尺寸)決定,通常用橫向和縱向有效像素?cái)?shù)來表示(如768×576)。為機(jī)器視覺系統(tǒng)所選擇的相機(jī)像素分辨率,必須大于或等于按照項(xiàng)目需求(包括對(duì)最小特征尺寸lmin和用于表示最小特征的像素?cái)?shù)pmin的要求)計(jì)算出的最小像素分辨率Rmin。下圖進(jìn)一步顯示了公式中涉及的參數(shù)含義:
鏡頭與相機(jī)的選型
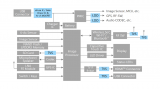
工業(yè)機(jī)器視覺系統(tǒng)中,鏡頭與相機(jī)的選型非常重要。如果事先既未確定相機(jī)又未確定鏡頭,則需要先了解項(xiàng)目工作環(huán)境對(duì)相機(jī)安裝(工作距離)、要檢測(cè)的最大范圍(視場(chǎng))、最小特征的尺寸和代表它的像素?cái)?shù)的要求,然后根據(jù)這些條件來計(jì)算應(yīng)使用何種鏡頭或相機(jī)。下圖為機(jī)器視覺項(xiàng)目選擇鏡頭和相機(jī)的簡(jiǎn)化流程:
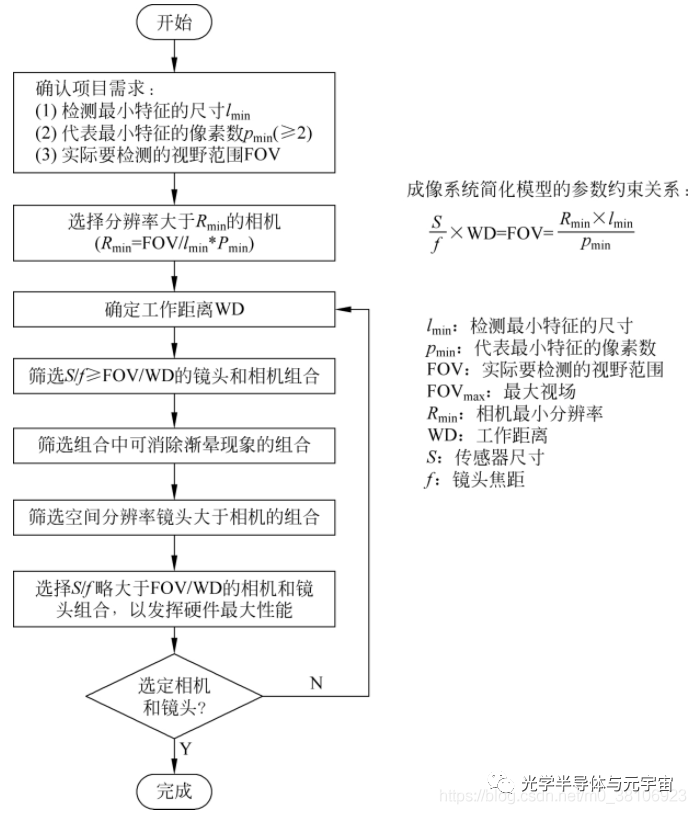
無論何種情況,都是基于成像系統(tǒng)簡(jiǎn)化模型的參數(shù)約束關(guān)系和項(xiàng)目需求獲取最優(yōu)搭配的過程。
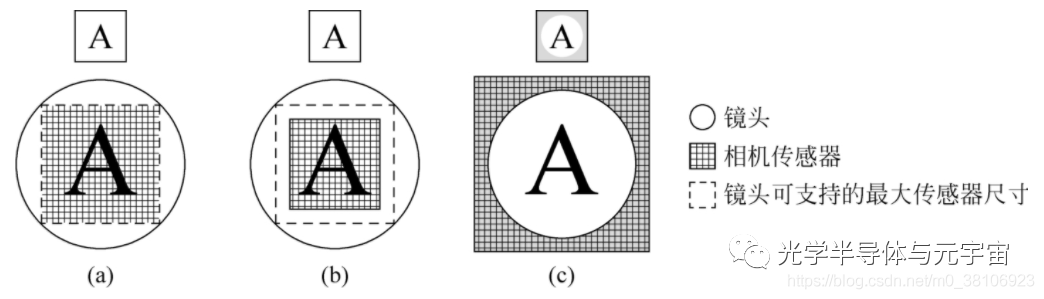
鑒于鏡頭能清楚成像的范圍受到最大像面的限制,因此在為相機(jī)選配鏡頭時(shí),要特別注意相機(jī)傳感器與鏡頭可支持最大傳感器之間的關(guān)系。
一般來說,必須確保所選鏡頭可支持的最大傳感器尺寸大于或等于相機(jī)的傳感器尺寸。這樣做的另一個(gè)主要原因是為了避免漸暈(Vignetting)現(xiàn)象的發(fā)生。
如圖下圖(c)所示,如果相機(jī)傳感器的尺寸大于鏡頭可支持的最大傳感器尺寸時(shí),所生成的圖像就會(huì)形成類似隧道的效果,該現(xiàn)象稱為漸暈現(xiàn)象。漸暈現(xiàn)象會(huì)增加機(jī)器視覺系統(tǒng)的開發(fā)難度,因此應(yīng)盡量避免。下圖中的(a) 、(b)分別顯示了在鏡頭可支持的最大傳感器尺寸等于或大于相機(jī)的傳感器尺寸時(shí)視覺系統(tǒng)的成像情況,這兩種情況下機(jī)器視覺系統(tǒng)均能正常工作。
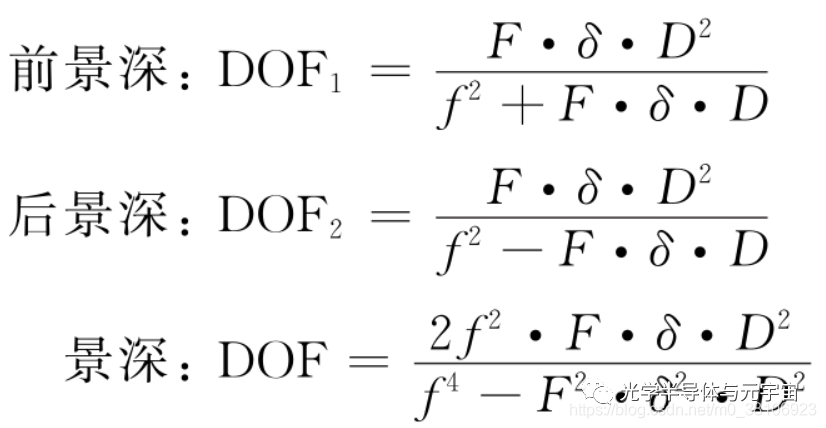
景深也是一個(gè)與鏡頭和成像系統(tǒng)關(guān)系十分密切的參數(shù),它是指在鏡頭前沿著光軸所測(cè)定的能夠清晰成像的范圍,如下圖所示:
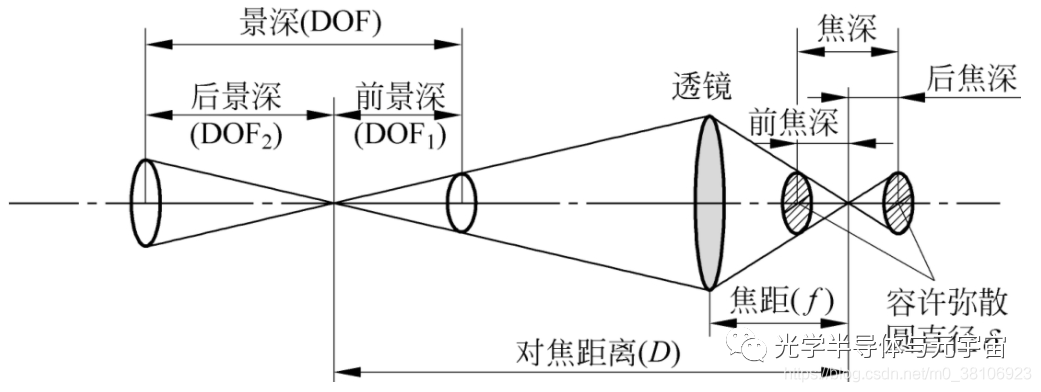
在成像系統(tǒng)的焦點(diǎn)前后,物點(diǎn)光線呈錐狀開始聚集和擴(kuò)散,點(diǎn)的影像沿光軸在焦點(diǎn)前后逐漸變得模糊,形成一個(gè)擴(kuò)大的圓,這個(gè)圓稱為彌散圓(circle of confusion)。若這個(gè)圓形影像的直徑足夠小(離焦點(diǎn)較近),成像會(huì)足夠清晰,如果圓形再大些(遠(yuǎn)離焦點(diǎn)),成像就會(huì)顯得模糊。當(dāng)在某個(gè)臨界位置所成的像不能被辨認(rèn)時(shí),則該圓就被稱為容許彌散圓(permissible circle of confusion)。焦點(diǎn)前后兩個(gè)容許彌散圓之間的距離稱為焦深。在目標(biāo)物一側(cè),焦深對(duì)應(yīng)的范圍就是景深。
為容許彌散圓的直徑。
f為鏡頭焦距。
D為對(duì)焦距離。
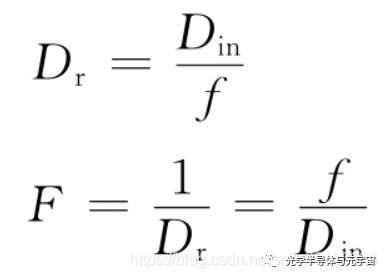
F為鏡頭的拍攝光圈(aperture)值。光圈值F常用鏡頭焦距和鏡頭入瞳的有效直徑Din的比值來表示,它是鏡頭相對(duì)孔徑Dr的倒數(shù),即:
從景深公式可以看出,后景深要大于前景深,而且景深一般隨著鏡頭的焦距、光圈值、對(duì)焦距離(可近似于拍攝距離)的變化而變化。在其他條件不變時(shí):
光圈越大(光圈值F越小),景深越小;光圈越小(光圈值F越大),景深越大。
鏡頭焦距越長,景深越小;焦距越短,景深越大。
距離越遠(yuǎn),景深越大;距離越近,景深越小。
在檢測(cè)目標(biāo)的高度在一定范圍內(nèi)可能變化的情況下,選擇合適的景深,對(duì)于機(jī)器視覺系統(tǒng)的穩(wěn)定性尤為重要。
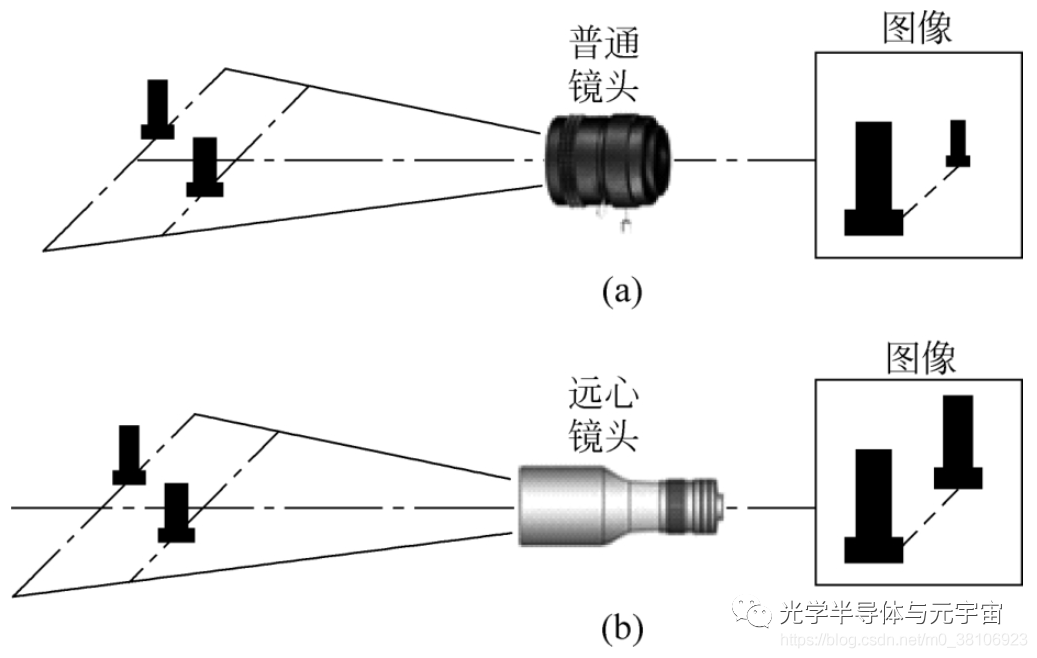
普通鏡頭和遠(yuǎn)心鏡頭
普通鏡頭與人眼一樣,觀測(cè)物體時(shí)都存在"近大遠(yuǎn)小”的現(xiàn)象,如下圖 (a)所示。也就是說,雖然物體在景深范圍內(nèi)可以清晰成像,但是其成像卻隨著物距增大而縮小。如果被測(cè)目標(biāo)不在同一物面上(如有厚度的物體),則會(huì)導(dǎo)致圖像中的物體變形。另一方面,相機(jī)傳感器的感光面通常并不容易被精確調(diào)整到與鏡頭的像平面重合(調(diào)焦不準(zhǔn)),由此也會(huì)產(chǎn)生誤差。為此,人們?cè)O(shè)計(jì)了遠(yuǎn)心鏡頭。
遠(yuǎn)心鏡頭(telecentric lens)有較大的景深,且可以保證景深范圍內(nèi)任何物距都有一致的圖像放大率,如下圖 (b)所示。多數(shù)機(jī)器視覺在測(cè)量、缺陷檢測(cè)或者定位等應(yīng)用上,對(duì)物體成像的放大倍率沒有嚴(yán)格要求,一般只要選用畸變較小的鏡頭,就可以滿足要求。但是,當(dāng)機(jī)器視覺系統(tǒng)需要檢測(cè)三維目標(biāo)(或檢測(cè)目標(biāo)不完全在同一物面上)時(shí),就需要使用遠(yuǎn)心鏡頭。
例如,要檢測(cè)厚度大于視場(chǎng)直徑的1/10的物體,或需要檢測(cè)帶孔徑、三維的物體等。一般來說,如果被測(cè)目標(biāo)物面變化范圍大于視場(chǎng)直徑的1/10時(shí),就需要考慮使用遠(yuǎn)心鏡頭。它可以確保測(cè)試過程中物距在一定范圍內(nèi)改變時(shí),系統(tǒng)放大倍數(shù)保持不變,從而保證系統(tǒng)的測(cè)量精度。
-
鏡頭
+關(guān)注
關(guān)注
2文章
520瀏覽量
25943 -
相機(jī)
+關(guān)注
關(guān)注
4文章
1434瀏覽量
54486 -
機(jī)器視覺
+關(guān)注
關(guān)注
163文章
4512瀏覽量
122284
原文標(biāo)題:機(jī)器視覺系統(tǒng)設(shè)計(jì),如何選擇合適的相機(jī)和鏡頭
文章出處:【微信號(hào):vision263com,微信公眾號(hào):新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
高光譜相機(jī)的空間分辨率,光譜范圍等參數(shù)我們要如何理解
如何選擇適合您的焊接熔池監(jiān)控相機(jī)

工業(yè)相機(jī)的幀率是不是越高越好

51camera 2024產(chǎn)品型錄-工業(yè)相機(jī)、工業(yè)鏡頭、光源
新品 | Moritex 推出匹配16K3.5μ相機(jī)的線掃鏡頭LU6040


變倍鏡頭參數(shù)詳解

工業(yè)相機(jī)鏡頭參數(shù)詳解助力精準(zhǔn)選型

光學(xué)測(cè)量鏡頭怎么選?

基于DCC和張氏標(biāo)定的相機(jī)鏡頭畸變校正

工業(yè)相機(jī)該選擇哪種圖像采集卡?

簡(jiǎn)述灰點(diǎn)工業(yè)相機(jī)的相關(guān)信息

運(yùn)動(dòng)相機(jī)為什么會(huì)脫穎而出
一款完美用于相機(jī)鏡頭的馬達(dá)驅(qū)動(dòng)芯片TMC2300-LA






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論