 淺析Simplorer的永磁直流電機控制(中)
淺析Simplorer的永磁直流電機控制(中)
在組件庫窗口中Simplorer Elements>>Basic Elements>>Circuit>>Semiconductor system Level,選擇 Mosfet (MOS),將其拖放到 Schematic中,選擇MOS并使用快捷鍵 Ctrl+R將其逆時針旋轉90度,確保使用Pin被選中。
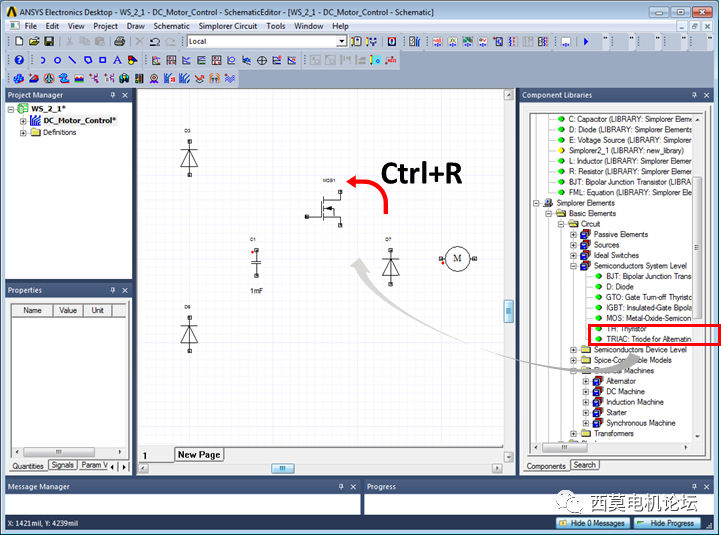
插入半導體開關(Mosfet)

確保使用Pin被選中
接下來連接組件。
將鼠標放在組件的一個終端上,鼠標指針的形狀變為十字形,按下 LMB 并移動十字直到下一個組件的連接端子。添加Ground節點,單擊圖標 , 并將其放入Schemaic,連接所有組件,直到完成如圖所示的電路。
, 并將其放入Schemaic,連接所有組件,直到完成如圖所示的電路。

連接端子

接下來創建數據集。
現在將創建一個數據數組,用于表示直流電機負載扭矩。在庫窗口Simplorer Elements>>Basic Elements>>Tools>>Time Functions,選擇DATAPAIRS組件,將其拖放到Schematic中,雙擊DATAPAIRS塊,將名稱更改為TorqueLoad,然后單擊Characteristic按鈕。選擇數據集...按鈕,然后添加(創建新數據集)。

名稱更改為TorqueLoad

單擊Datasets

單擊Add
將名稱更改為Tload并根據以下內容輸入時間/值對:
0 1
0.075 1
0.08 10
0.1 10
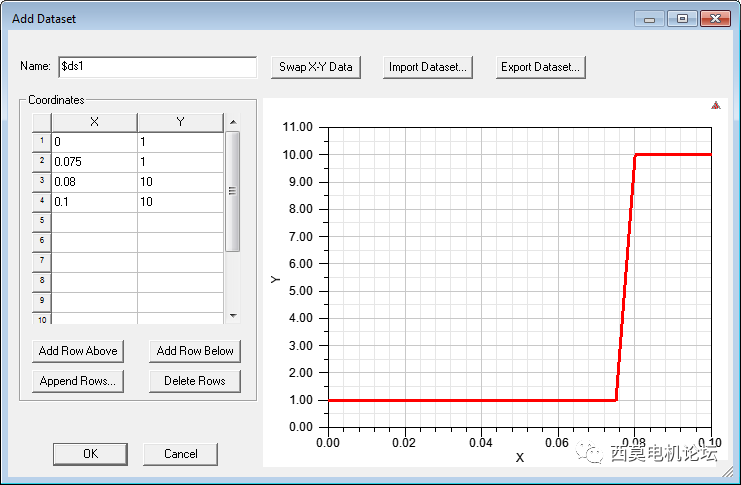
輸入時間/值對
點擊“確定”,然后“完成”,然后再“確定”,然后,點擊確定退出所有窗口。
接下來向直流電機添加新的負載轉矩。
再次雙擊TorqueLoad表查找塊,選擇輸出/顯示選項卡,取消選中輸出值VAL的輸出顯示引腳框。雙擊DC Motor組件并將負載輸入定義為剛剛創建的指定TorqueLoad.VAL的表查找塊的輸出。

取消選中輸出值VAL的輸出顯示

負載定義為TorqueLoad.VAL
接下來添加控制方案。
控制方案由外部Speed Control回路和內部Current Control 回路組成。這兩個控件有不同的目標,其中速度控制將電機驅動到1000rpm的固定速度,電流控制使電流不超過最大值,將其限制在20A左右的±2.5A范圍內,要實現的完整方案如下圖所示。

外部Speed Control回路和內部Current Control回路
接下來插入控制邏輯模塊。
在組件庫窗口中Simplorer Elements>>Basic Elements>>Blocks>>Continous Blocks,選擇GAIN塊并將其拖放到Schematic中3次,選擇INTG(積分器)塊并將其拖放到原理圖中。在組件庫窗口中Simplorer Elements>>Basic Elements>>Blocks>>Sources Blocks。選擇CONST(常量值)塊并將其拖放到原理圖中,在組件庫窗口中Simplorer Elements>>Basic Elements>>Blocks>>Signal Processing Blocks,選擇 SUM塊并將其拖放到Schematic中3次,選擇TPH (Two-Point Element with Hysteresis) 塊并將其拖放到Schematic中,選擇LIMIT(限制器)塊并將其拖放到Schematic中,將10個塊排列如下圖。

外部Speed Control回路和內部Current Control回路所需元器件
接下來設置組件可見性和屬性。
為了在原理圖上獲得更好的組件可見性,建議檢查高級屬性轉到菜單項Tools>>Options>>General Options>>Schematic Editor>>General 最終選中“顯示高級屬性數據”。在Tools>>Schematic Editor >>Fonts選擇所需的字體類型和字體大小。 您還可以選中“應用此字體...活動原理圖”框來修改已放置在原理圖上的元素的可見性。準備好后,點擊OK。
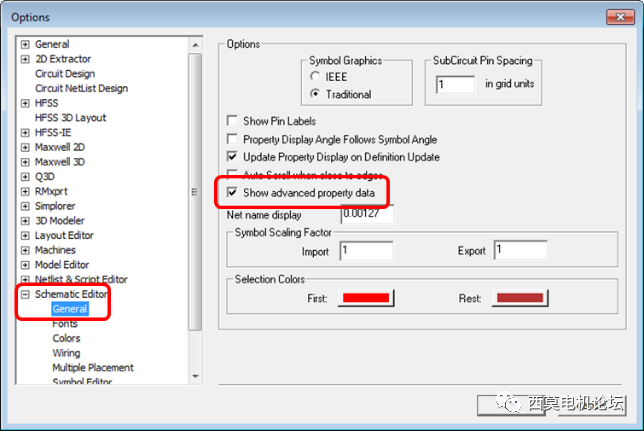
顯示高級屬性數據
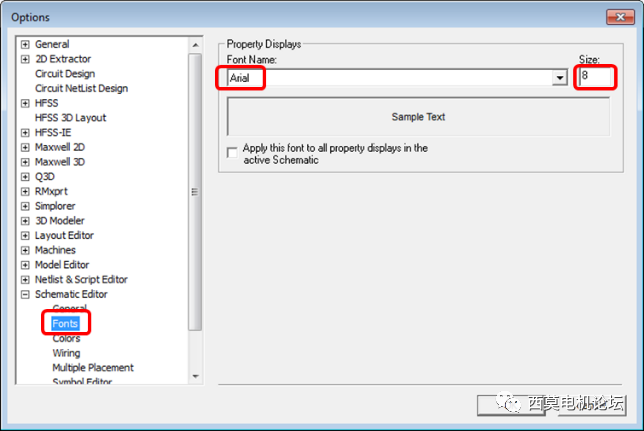
Fonts字體設置
接下來對齊組件。
為了使模塊方案和一般每個電路更具可讀性,使用Simplorer提供的對齊功能通常很有幫助,要水平對齊元素/塊,首先選擇要對齊的元素/塊,然后轉到菜單項 Draw>>Align Horizontal,要垂直對齊元素/塊。先選擇要對齊的元素/塊,然后轉到菜單項Draw>>Flip Vertical。

Align Horizontal與Flip Vertical
接下來修改增益模塊屬性。
雙擊GAIN1并將名稱更改為Motor_speed,在Output/Display Tab, 不勾選Show Pin 而選INPUT,在參數選項卡INPUT設置為DCMP1.N(DC Motor Speed),KP設置為1,TS為0。

GAIN1(Motor_speed)
雙擊GAIN2并將名稱更改為Proportional_Gain,在參數選項卡KP設置為50。

GAIN2(Proportional_Gain)
雙擊GAIN3并將名稱更改為Motor Current,在Output/Display Tab, 不勾選Show Pin而選擇INPUT,在參數選項卡INPUT設置DCMP1.IA (DC Motor Current),KP設置為1,TS設置為0。

GAIN3(Motor_current)
接下來修改求和模塊屬性。
按Ctrl鍵選擇SUM1、SUM2和SUM3,執行RMB>>Flip Vertical,雙擊SUM1并將INPUT[0]的符號設置為“-”,保持SUM2不變,雙擊SUM3并將INPUT[1]的符號設置為to “-”。

SUM1
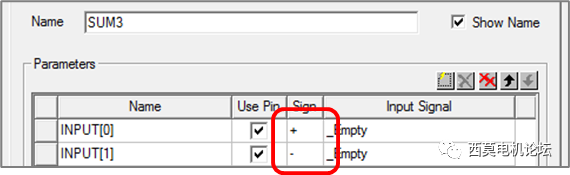
SUM3
-
電源
+關注
關注
184文章
17773瀏覽量
250754 -
仿真
+關注
關注
50文章
4101瀏覽量
133724 -
永磁直流電機
+關注
關注
1文章
21瀏覽量
7023
發布評論請先 登錄
相關推薦







 工商網監
工商網監
評論