") 協(xié)作機器人-功率和力限制
協(xié)作機器人-功率和力限制
PFL 代表 功率和力限制。PFL是機器人協(xié)同工作并成為協(xié)作機器人(協(xié)作機器人)的方式之一。PFL的本質(zhì)是,即使機器人和人類接觸,人類也應(yīng)該不受傷害。當(dāng)然,僅僅購買一個合適的機器人是不夠的——如果機器人拿著皮下注射針頭戳你的眼睛,那么再多的 PFL 也無法拯救你。因此,為PFL設(shè)計的機器人是協(xié)作PFL應(yīng)用的必要條件,但不是充分條件。
讓我們“備份總線”,回到開頭。安全的首要任務(wù)是消除危險(固有安全的設(shè)計措施),或者如果無法做到這一點,請使用安全功能(保護(hù))。如果安全功能不能充分降低風(fēng)險,那么最后一個選項是“警告和通知”。標(biāo)準(zhǔn)中有以下圖形的更全面版本(例如參見RIA TR R15.306-2016),但通常依靠人們閱讀警告或佩戴特殊安全裝備或跟蹤設(shè)備處于層次結(jié)構(gòu)的底端。
對于專為協(xié)作應(yīng)用設(shè)計的機器人(我們稱之為協(xié)作機器人),以嘗試消除協(xié)作機器人通常具有的危險
漂亮的圓角,沒有鋒利的邊緣或點
臂(機械手)和臂連接設(shè)計用于消除夾點
帶襯墊的柔軟外殼
可變形部件
機器人運動部件的質(zhì)量最小化
不幸的是,雖然這些通常是有幫助的,但它們還不夠,這就是PFL的用武之地,這就是它變得有趣的地方。通常的功能安全是避免傷害,例如手指被壓碎或手臂骨折甚至死亡。那么機器人在造成傷害之前能有多難受。每天被打100次,但只是輕微的打擊,這是可以接受的嗎?100 次微小的撞擊等同于一次非常好的推動嗎?ISO TS 15066對此提供了一些指導(dǎo),以幫助機器人安全標(biāo)準(zhǔn)ISO 10218:2011中已有的指導(dǎo),并使用疼痛作為閾值而不是傷害。我當(dāng)然想避免傷害,但我也不熱衷于疼痛,所以就個人而言,我很高興標(biāo)準(zhǔn)使用疼痛而不僅僅是傷害作為衡量標(biāo)準(zhǔn)。
然后,ISO TS 15066 給出了不同身體位置的限制,總共約 30 個。盡管上面圖片顯示了什么,但我相信志愿者被蒙住眼睛,有耳塞,所以他們不知道什么時候會有撞擊。
兩種類型的沖擊被認(rèn)為是瞬態(tài)的(無夾緊 - 發(fā)生在自由空氣中)和準(zhǔn)靜態(tài)(夾緊)以及兩者的限制。使用瞬態(tài)一詞是因為所涉及的力達(dá)到峰值,然后在不涉及陷阱時迅速回落到零,對于準(zhǔn)靜態(tài)情況,力和壓力將上升,然后當(dāng)身體部位被夾緊時通常保持在那個高水平,直到你解放你的手。
最大許可準(zhǔn)靜態(tài)接觸標(biāo)準(zhǔn)中的限制示例包括
上臂和肘關(guān)節(jié) – 三角肌 150N 和肱骨 220N。
前臂肌肉 – 150N
手和手指一般為140N
小腿,包括脛骨中部 – 130N
該標(biāo)準(zhǔn)在與頭部接觸時似乎有些矛盾,說必須防止它,但仍然給出限制。如果無論力如何都可以與眼睛接觸,則很難反對使用安全護(hù)目鏡或類似物。然而,我確實在YouTube上看到了視頻,這些視頻似乎以協(xié)作機器人在桌子上以PFL模式工作,人們坐在他們旁邊。對我來說,與操作員負(fù)責(zé)人的接觸看起來完全不受阻礙。
我看過其他文章,說人頭最弱的骨頭是鼻骨,骨折力為342N,并引用337N作為頸部甲狀腺和環(huán)狀軟骨的斷裂力。
與PFL相關(guān)的安全功能的典型要求是PL d CAT 3,即使我討厭看到強制要求類別。
與我在之前的博客中討論的SSM相比,使用PFL的協(xié)作機器人通常移動得慢得多,這是因為功率和力與速度具有平方定律關(guān)系(速度加倍會使力翻兩番)。因此,降低速度是限制撞擊過程中功率和力的關(guān)鍵方法。該速度的測量和限制本身就是一項安全功能,必須達(dá)到或超過PFL模式要求的SIL或PL。機器人可以在沒有人靠近時自由使用SSM(速度和分離監(jiān)控 - 請參閱我最近關(guān)于該主題的博客),然后在有人靠近時切換到PFL模式。這樣的組合可以提供最大的生產(chǎn)力。但是,請注意,有時僅將機器人放在籠子中可能會更有效率。
RIA R15.806中給出了功率受限協(xié)作應(yīng)用的驗證方法(我不確定這是否與ISO PAS 5672相同)。需要1N的最小分辨率和1KHz的帶寬。YouTube上有視頻,似乎顯示機器人超過了這些限制。
最后警告 – 無論機器人/協(xié)作機器人內(nèi)置的功能如何,應(yīng)用程序都決定了一切。如果機器人拿著刀或雜耍炸藥PFL不足以拯救你,你需要一種不同形式的安全(也許是不同的工作場所)。
AGV/AMR/IMR和其他移動機器人的標(biāo)準(zhǔn)沒有這樣的限制,但如果它們能與人碰撞,那么應(yīng)用相同的限制似乎是合乎邏輯的,也許專注于小腿和小腿。
EN 16005涵蓋自動門與ISO 10218 / ISO TS 15066中的限制相似,如果相對邊緣之間的間隙為<400mm,則限制為200N,如果間隙為>1400mm,則限制為500N。
ISO 13482個人護(hù)理機器人標(biāo)準(zhǔn)也談到了限制,這表明要求延伸到工業(yè)機器人之外。
我還看到了新標(biāo)準(zhǔn)的草案,ISO / DIS 21260,標(biāo)題為“機械安全 - 移動機械或機械與人員運動部件之間物理接觸的機械安全數(shù)據(jù)”,該標(biāo)準(zhǔn)遵循ISO 13849-1或IEC 62061限制接觸條件的傳感器和控制系統(tǒng)。該標(biāo)準(zhǔn)在附錄C中還包含一個家用AGV的很好的例子。
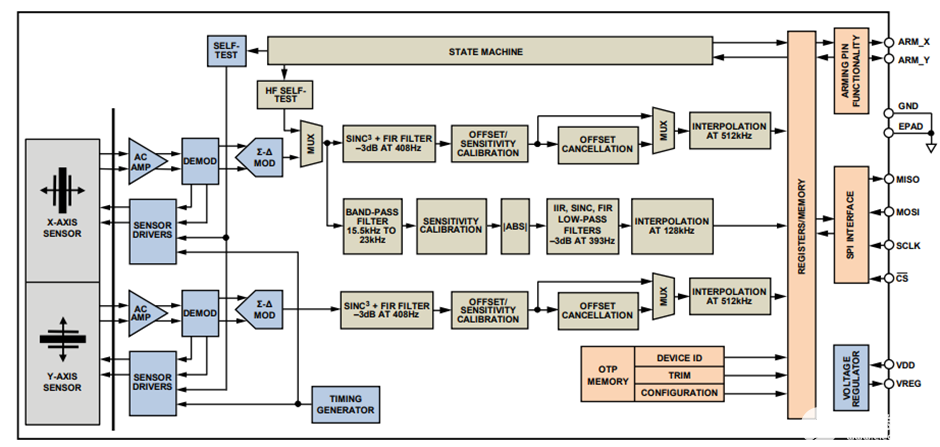
圖4 - X軸上具有聲通道的ADXL195加速度計
我了解了加速度計的功能安全性,一個明顯的問題是加速度計是否在這一領(lǐng)域有用。那么問題就變成了,你能知道你撞到某物的力度有多大(你減速的強度有多大),甚至只是你是否及時撞到了某物以停止并可能倒車。這種汽車目標(biāo)部件還可以在減速開始之前測量保險杠中任何變形的噪音(在汽車中可能效果更好)。如果我沒記錯的話,響應(yīng)時間是 2 毫秒,安全氣囊展開需要在 30 毫秒內(nèi)完成。對于以5公里<行駛的mobot來說,30ms是大量的時間,2ms代表2.7mm的向前運動。有趣的是,像這樣的傳感器以與汽車前部成45度角安裝在汽車中。因此,全正面碰撞應(yīng)導(dǎo)致 X 軸積極響應(yīng),Y軸負(fù)響應(yīng),但數(shù)量相同。通過這種方式,您可以分辨出撞擊發(fā)生的方向并展開安全氣囊。對于一個mobot,我想你會停止移動或倒車。對于非常高的機器人,我相信如果碰撞發(fā)生在地面附近的激光掃描儀未檢測到的架空架子上,這也應(yīng)該有效。
ISO 5672的最新草案給出了一些可能發(fā)生意外影響的很好的例子,包括:
當(dāng)有人認(rèn)為機器人試圖撿起的物體未對齊時,他們會把手伸到機器人抓手下面。然后,它們的手可以在夾具和桌子之間或夾持器本身內(nèi)被壓碎。
有人躲進(jìn)去撿起機器人掉落的東西,當(dāng)機器人移動時被機器人擊中背部
有人在移動機器人翻車之前沖進(jìn)去撿東西
所有這些似乎都是完全合理的,事實上,人性使它們難以避免,因此需要安全功能。
審核編輯:郭婷
-
傳感器
+關(guān)注
關(guān)注
2550文章
51035瀏覽量
753082 -
機器人
+關(guān)注
關(guān)注
211文章
28380瀏覽量
206918 -
加速度計
+關(guān)注
關(guān)注
6文章
700瀏覽量
45891
發(fā)布評論請先 登錄
相關(guān)推薦
MiR推出MC600移動協(xié)作機器人
協(xié)作機器人TM25S:高效人機協(xié)作改變傳統(tǒng)作業(yè)方式

協(xié)作機器人要實現(xiàn)0.03mm路徑精度有多難
優(yōu)傲機器人升級高負(fù)載協(xié)作機器人,助力客戶生產(chǎn)效率飛躍
協(xié)作機器人拽拖示教詳解
海默機器人榮膺第十屆恰佩克獎,展現(xiàn)協(xié)作機器人創(chuàng)新力量

工業(yè)4.0中的機器人向協(xié)作機器人演進(jìn)
海默機器人榮獲“中國協(xié)作機器人創(chuàng)新產(chǎn)品獎”:創(chuàng)新引領(lǐng),智造未來
「碼」力十足,大族協(xié)作機器人更適合碼垛應(yīng)用
PCB行業(yè):用協(xié)作機器人,就選大族機器人
協(xié)作機器人和工業(yè)機器人區(qū)別在哪?
富唯智能機器人集成了協(xié)作機器人、移動機器人和視覺引導(dǎo)技術(shù)
協(xié)作機器人和工業(yè)機器人究竟有哪些不同之處?
什么是協(xié)作機器人?為什么使用協(xié)作機器人?
科聰協(xié)作科聰協(xié)作(復(fù)合)移動機器人整體解決方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論