


| 移植準(zhǔn)備
1、去托管平臺(tái)把源碼下下來;
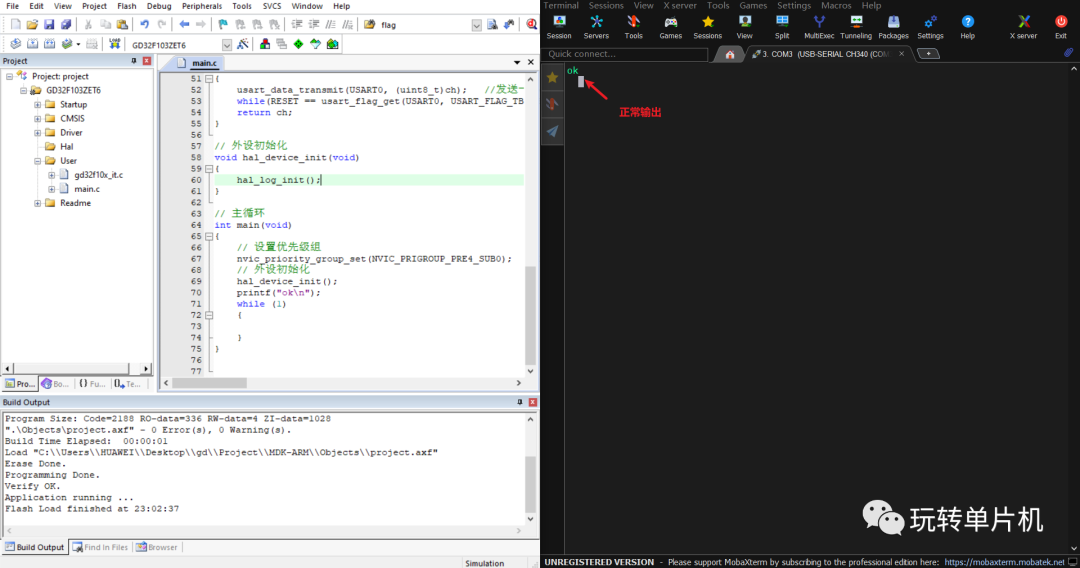
2、準(zhǔn)備一個(gè)基礎(chǔ)工程,實(shí)現(xiàn)串口重定義輸出:
|移植源碼
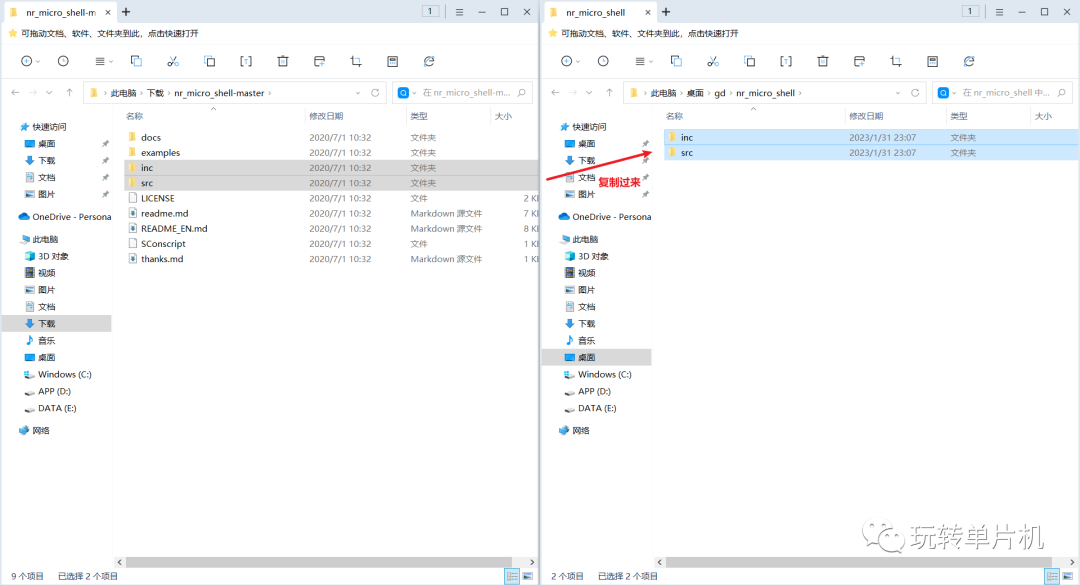
1、把核心源碼復(fù)制到工程中:
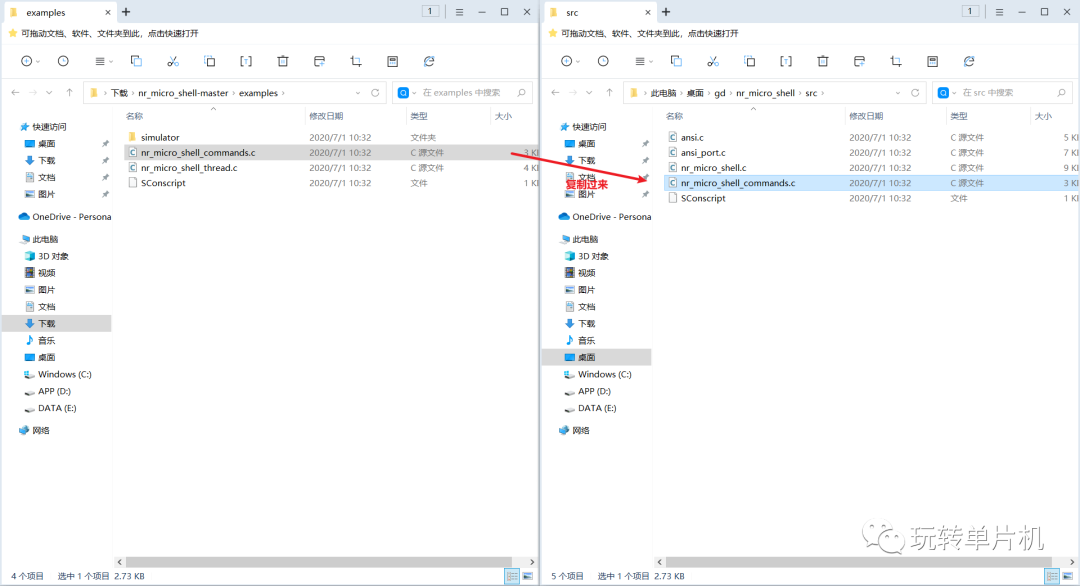
2、把命令示例源碼復(fù)制到工程中:
3、把源碼添加到工程中:
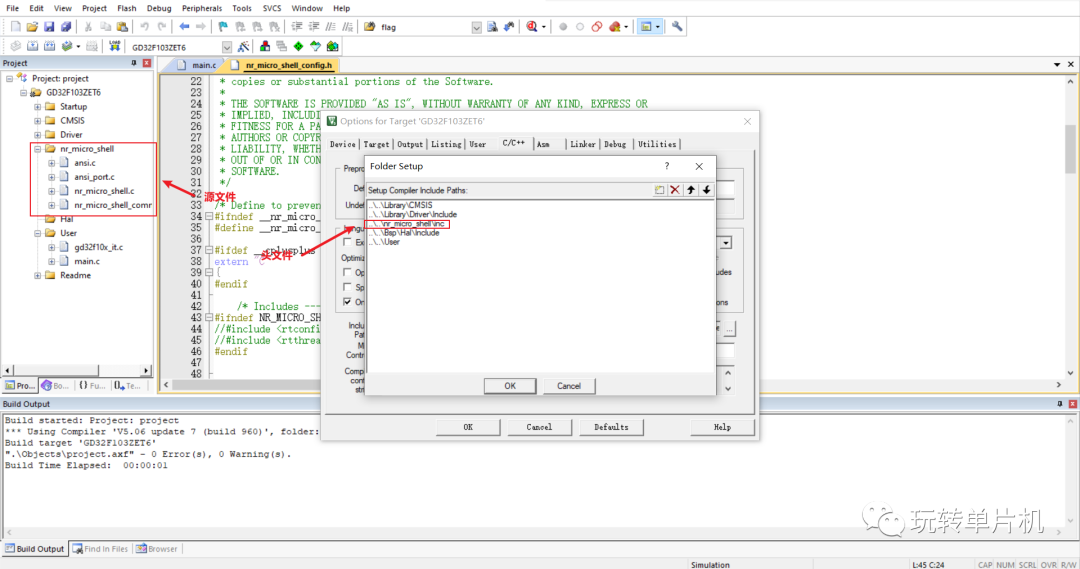
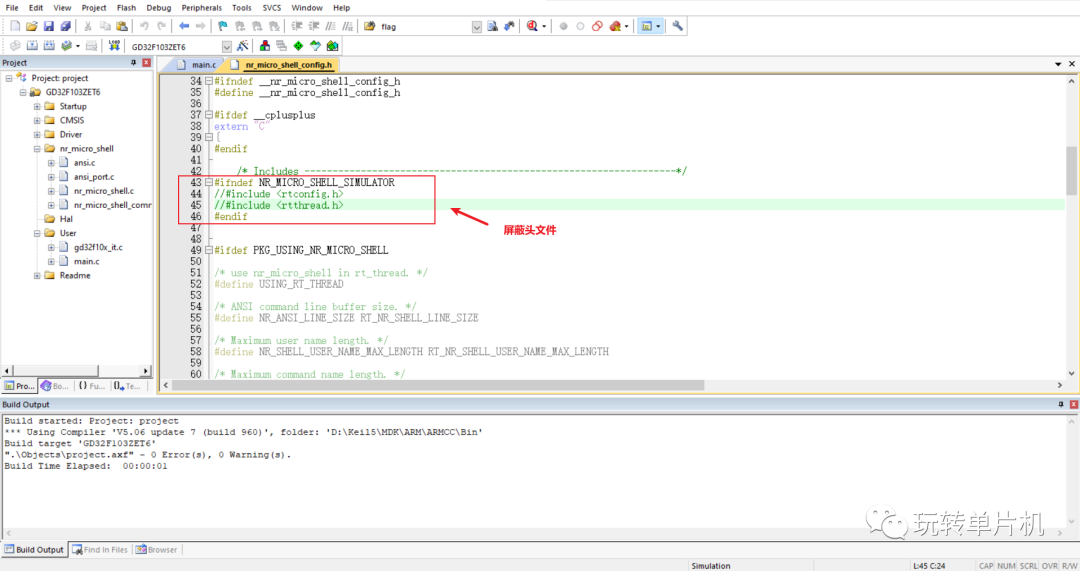
4、屏蔽RT-Thread 的頭文件:
5、修改輸出的末尾行模式:

6、初始化nr_micro_shell:
#include "gd32f10x.h" #include "stdio.h" #include "nr_micro_shell.h" // uart配置 void hal_log_init(void) { /* 使GPIO時(shí)鐘 */ rcu_periph_clock_enable(RCU_GPIOA); /* 使USART時(shí)鐘 */ rcu_periph_clock_enable(RCU_USART0); /* 連接端口到USARTx_Tx */ gpio_init(GPIOA, GPIO_MODE_AF_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_9); /* 連接端口到USARTx_Rx */ gpio_init(GPIOA, GPIO_MODE_IN_FLOATING, GPIO_OSPEED_50MHZ, GPIO_PIN_10); /* USART配置 */ usart_deinit(USART0); /*!< 復(fù)位外設(shè)USART */ usart_word_length_set(USART0, USART_WL_8BIT); /*!< 配置USART字長 */ usart_stop_bit_set(USART0, USART_STB_1BIT); /*!< 配置USART停止位 */ usart_parity_config(USART0, USART_PM_NONE); /*!< 配置USART奇偶校驗(yàn) */ usart_baudrate_set(USART0, 115200U); /*!< 配置USART波特率 */ usart_receive_config(USART0, USART_RECEIVE_ENABLE); /*!< USART/UART接收器配置 */ usart_transmit_config(USART0, USART_TRANSMIT_ENABLE); /*!< USART/UART發(fā)送器配置 */ usart_enable(USART0); /*!< 使能USART */ /*中斷管理器使能,并分配優(yōu)先級(jí)*/ nvic_irq_enable(USART0_IRQn, 1, 0); /*清除中斷標(biāo)志*/ usart_interrupt_flag_clear(USART0, USART_INT_FLAG_RBNE); ?? usart_interrupt_flag_clear(USART0,?USART_INT_FLAG_IDLE); ?? /*?使能串口中斷?*/ usart_interrupt_enable(USART0, USART_INT_RBNE); /*!< 接收不為空中斷 */ } // usart0中斷 void USART0_IRQHandler(void) { if(RESET != usart_interrupt_flag_get(USART0, USART_INT_FLAG_RBNE)) { /* 清除標(biāo)志位 */ usart_interrupt_flag_clear(USART0, USART_INT_FLAG_RBNE); /* 接收數(shù)據(jù)(注意) */ shell(usart_data_receive(USART0)); } } //printf重定向函數(shù) int fputc(int ch,FILE *f) { usart_data_transmit(USART0, (uint8_t)ch); //發(fā)送一字節(jié)數(shù)據(jù) while(RESET == usart_flag_get(USART0, USART_FLAG_TBE)); //等待發(fā)送完成 return ch; } // 外設(shè)初始化 void hal_device_init(void) { hal_log_init(); /* 初始化 */ ?? shell_init(); } // 主循環(huán) int main(void) { // 設(shè)置優(yōu)先級(jí)組 nvic_priority_group_set(NVIC_PRIGROUP_PRE4_SUB0); // 外設(shè)初始化 hal_device_init(); while (1) { } }
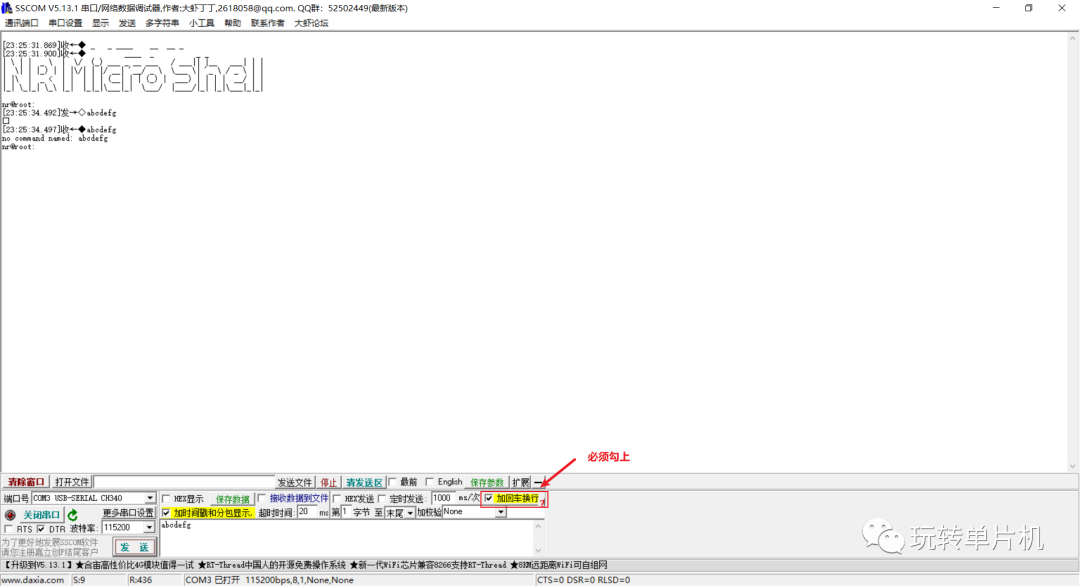
7、查看效果:
| 定義指令
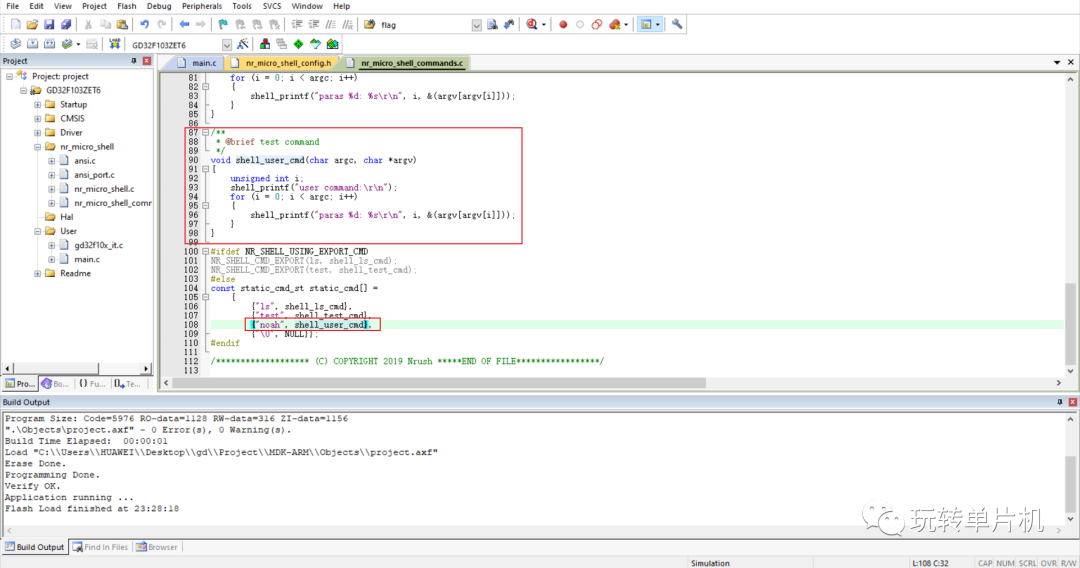
1、添加自定義指令代碼:
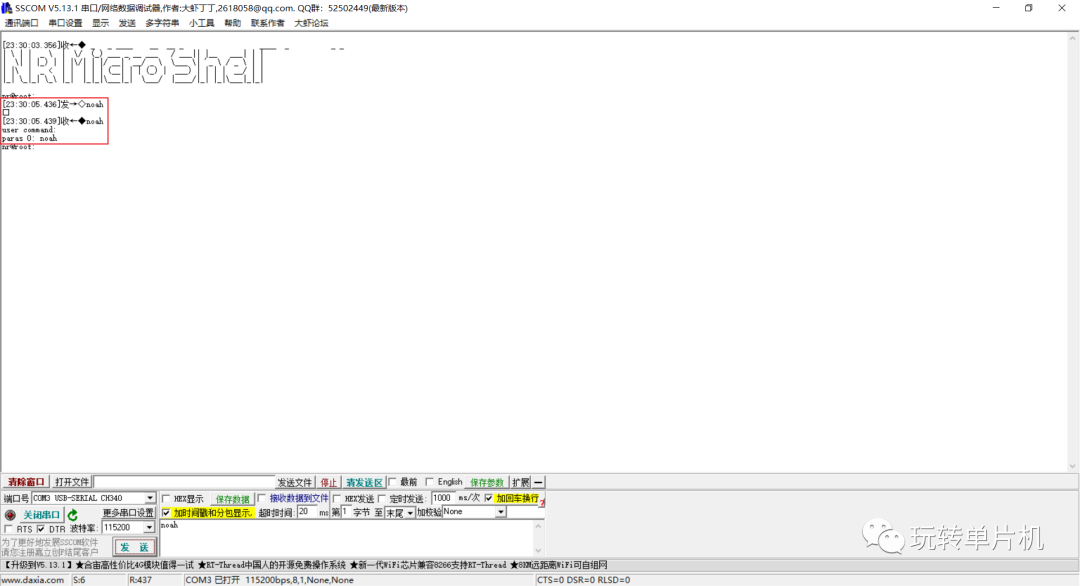
2、查看效果:
| 最終效果
移植成功后就可以在MCU中體驗(yàn)Linux的shell命令那種感覺,注意一定要修改輸出的末尾行模式,不然會(huì)不能正常使用,來感受一下最終效果:
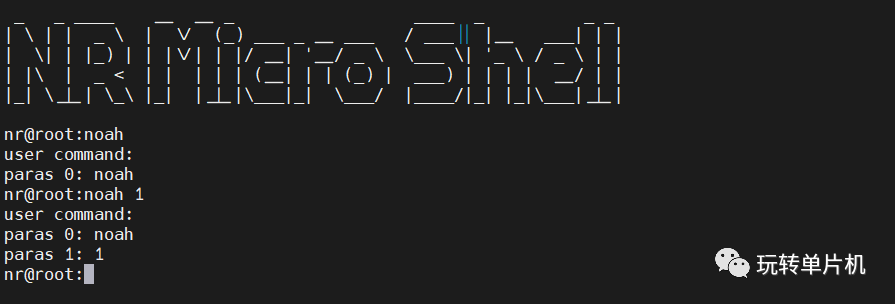
最終的效果還是不錯(cuò)的,和Linux的體驗(yàn)類似,感興趣的同學(xué)可以移植來體驗(yàn)一下MCU級(jí)別的shell命令交互。
審核編輯:劉清
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報(bào)投訴
-
嵌入式
+關(guān)注
關(guān)注
5152文章
19686瀏覽量
317924 -
串口中斷
+關(guān)注
關(guān)注
0文章
67瀏覽量
14345 -
RT-Thread
+關(guān)注
關(guān)注
32文章
1414瀏覽量
42036 -
USART串口
+關(guān)注
關(guān)注
0文章
32瀏覽量
7087
原文標(biāo)題:通俗|嵌入式命令行交互工具
文章出處:【微信號(hào):玩轉(zhuǎn)單片機(jī),微信公眾號(hào):玩轉(zhuǎn)單片機(jī)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評(píng)論請先 登錄
相關(guān)推薦
熱點(diǎn)推薦
在STM32實(shí)現(xiàn)命令行
工作中的開發(fā)環(huán)境都是基于linux命令行交互,作為命令行的重度使用者,玩單片機(jī)也要使用命令行工具,百度了一些
發(fā)表于 12-09 11:32
?3114次閱讀
Linux命令行的基本使用
嵌入式Linux開發(fā)環(huán)境的構(gòu)建,Linux命令行的基本使用,VI、GCC、Makefile基本工具的使用,交叉開發(fā)環(huán)境的使用。學(xué)習(xí)條件: 1.C語言編程基礎(chǔ)
發(fā)表于 11-05 09:08
Linux命令行怎么使用
嵌入式Linux開發(fā)環(huán)境的構(gòu)建,Linux命令行的基本使用,VI、GCC、Makefile基本工具的使用,交叉開發(fā)環(huán)境的使用。學(xué)習(xí)條件: 1.C語言編程基礎(chǔ)
發(fā)表于 12-16 07:46
在單片機(jī)上實(shí)現(xiàn)shell命令行交互的方法
文章發(fā)表于我的個(gè)人微信公眾號(hào):嵌入式軟件那些事公眾號(hào)會(huì)定期分享一些嵌入式軟件開發(fā)相關(guān)的技術(shù)經(jīng)驗(yàn),涉及嵌入式Linux、STM32、RTOS等,希望對大家有所幫助!如何在單片機(jī)上實(shí)現(xiàn)shell命
發(fā)表于 01-12 07:33
Xilinx軟件命令行工具:XSCT開發(fā)和調(diào)試
了解如何使用XSCT,Xilinx軟件命令行工具進(jìn)行開發(fā)和調(diào)試。
該視頻演示了XSCT如何充當(dāng)Xilinx SDK的命令行控制臺(tái)。
Xilinx軟件命令行工具進(jìn)行開發(fā)和調(diào)試
了解如何使用XSCT,Xilinx軟件命令行工具進(jìn)行開發(fā)和調(diào)試。
該視頻演示了XSCT如何充當(dāng)Xilinx SDK的命令行控制臺(tái)。
使用串口登錄嵌入式Linux設(shè)備命令行的方法
使用串口登錄嵌入式Linux設(shè)備命令行的方法如下:舉例如下:平臺(tái):AT91SAM9G45OS: linux-2.6.66交叉編譯器:arm-linux-gcc ,版本:3.4.1用到的命令
發(fā)表于 11-01 16:57
?10次下載

學(xué)習(xí)筆記(02):嵌入式Linux開發(fā)基礎(chǔ)-shell命令使用
嵌入式Linux開發(fā)環(huán)境的構(gòu)建,Linux命令行的基本使用,VI、GCC、Makefile基本工具的使用,交叉開發(fā)環(huán)境的使用。學(xué)習(xí)條件: 1.C語言編程基礎(chǔ)
發(fā)表于 11-01 18:00
?14次下載
mini shell命令行調(diào)試工具(單片機(jī)、c語言)
@mini shell命令行調(diào)試工具介紹Mini shell 命令行調(diào)試工具(單片機(jī)、c語言)Mini shell是一個(gè)特別適合低內(nèi)存的單片機(jī)上使用的一個(gè)
發(fā)表于 11-29 10:21
?10次下載
Golang基于flag庫實(shí)現(xiàn)一個(gè)命令行工具
Golang 標(biāo)準(zhǔn)庫中的 flag 庫提供了解析命令行選項(xiàng)的能力,我們可以基于此來開發(fā)命令行工具。

單片機(jī)上如何做shell命令行交互
做過嵌入式Linux開發(fā)或使用過桌面Linux系統(tǒng)的童鞋們,肯定對shell命令交互印象比較深刻,然而我們大多數(shù)搞嵌入式軟件開發(fā)的碼農(nóng)都是基于單片機(jī),比如51、STM32等進(jìn)行開發(fā)的,





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論