") A6伺服操作小妙招您必須掌握!
A6伺服操作小妙招您必須掌握!
本次速成班為大家?guī)砹?個松下A6何服異常排除小妙招,只需10分鐘,您即可成為精通操作的“大神”。
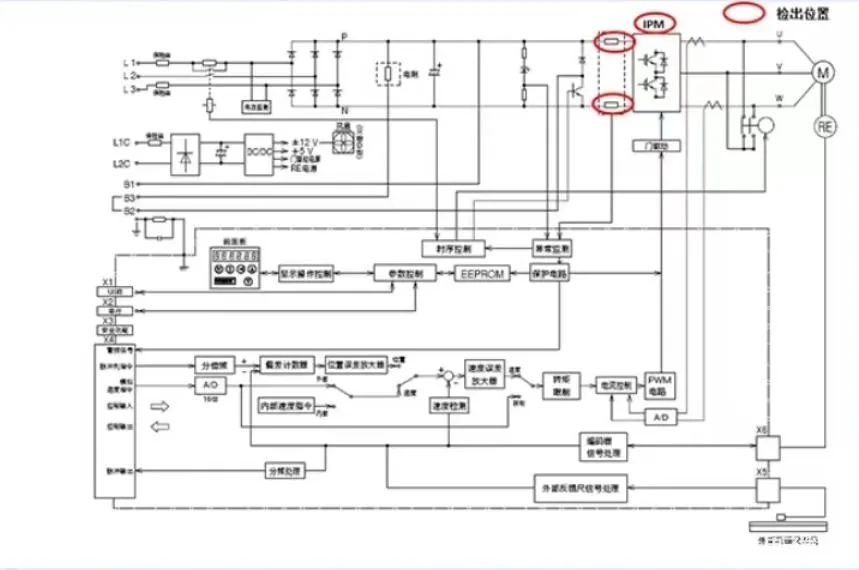
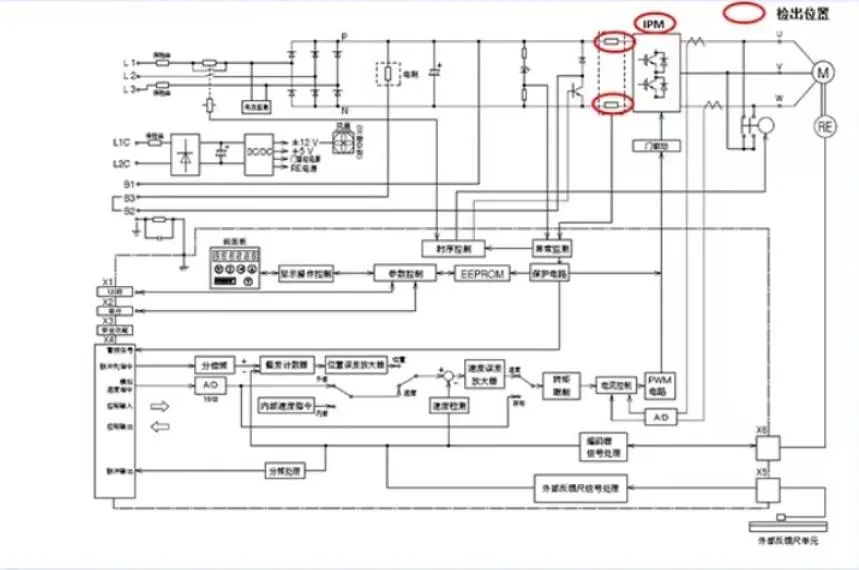
驅(qū)動器在使用過程中出現(xiàn)Err14.1IPM異常保護(hù),應(yīng)該怎么辦呢?
這個問題提的很好,出現(xiàn)ERR14.1IPM異常保護(hù),通常是因為驅(qū)動電機(jī)的IPM(智能功率模塊)內(nèi)的過電流檢出異常。這時,我們應(yīng)該這樣處理:
1、確認(rèn)電機(jī)的UVW是否正確連接。2、是否發(fā)生最大轉(zhuǎn)矩→通過前面板的 "d04_trq" 進(jìn)行確認(rèn)→若是最大轉(zhuǎn)矩(通常300%),降低加減速或者負(fù)載使其不出現(xiàn)最大轉(zhuǎn)矩。
3、小輸出時,測量相的線間電阻,確認(rèn)是否不平衡。→若不平衡,需更換電機(jī)。(大功率由于卷線電阻在1Q以下,難以判斷)4、確認(rèn)電機(jī)的接地,測U、V、W與地線之間的電阻。→若無限大,需更換電機(jī)。
5、若通過以上方法并未得到改善,不能確認(rèn)原因是什么,拆下電機(jī)的電源線,開啟伺服,稍微轉(zhuǎn)動電機(jī)軸。→若發(fā)生了Err14.1,很有可能是驅(qū)動器損壞。→若不發(fā)生Err14.1,很有可能是電機(jī)線的接地、電機(jī)線的接觸不良、電機(jī)自身故障。
出現(xiàn)Err24.0位置偏差過大保護(hù)時,又該怎樣處理呢?
這種情況是位置偏差脈沖超過Pr0.14(位置偏差過大設(shè)定)的設(shè)定時發(fā)生異常引起的。只需按照下面步驟操作,就可以解決啦!
1、電機(jī)未能跟隨指令進(jìn)行動作。指令位置偏差可通過驅(qū)動器前面板的 "d00_uEP" 的監(jiān)視模式或者PANATERM監(jiān)視功能的[指令位置偏差] 、波形曲線進(jìn)行確認(rèn)。確認(rèn)轉(zhuǎn)矩是否飽和,轉(zhuǎn)矩指令值可通過驅(qū)動器前面板"d04_trq" 的監(jiān)視模式或者PANATERM監(jiān)視功能的 [轉(zhuǎn)矩指令]、波形曲線進(jìn)行確認(rèn)。偏差大,轉(zhuǎn)矩指令值不飽和時,需調(diào)整增益。使用轉(zhuǎn)矩限制,若指令轉(zhuǎn)矩被限制,試著將Pr0.13(第1轉(zhuǎn)矩限制)、Pr5.22(第1轉(zhuǎn)矩限制)的設(shè)定值變更到轉(zhuǎn)矩指令值所容許的范圍內(nèi)。若轉(zhuǎn)矩飽和的情況下,加長加減速時間,減輕負(fù)載,降低速度后進(jìn)行確認(rèn)。
2、Pr0.14(位置偏差過大設(shè)定)的值小。若設(shè)備的規(guī)格無問題, 則將Pr0.14(位置偏差過大設(shè)定)的設(shè)定值加大。
如果出現(xiàn)Err38.0驅(qū)動禁止輸入保護(hù),是不是也有辦法解決呢?
那當(dāng)然啦,出現(xiàn)這種異常的原因是Pr5.04 [驅(qū)動禁止輸入設(shè)定]=0時,正方向/負(fù)方向驅(qū)動禁止輸入(POT/NOT)都為ON。Pr5.04=2時,正方向/負(fù)方向驅(qū)動器禁止輸入其中一個為ON。解決方案其實非常簡單:
確認(rèn)連接到正方向/負(fù)方向驅(qū)動禁止輸入的開關(guān)、電線、電源、連接部是否異常。特別確認(rèn)控制用信號電源(DC12~24V)啟動是否延遲。
審核編輯黃宇
-
驅(qū)動器
+關(guān)注
關(guān)注
52文章
8228瀏覽量
146264
發(fā)布評論請先 登錄
相關(guān)推薦
易+A6多功能溫控器,智能享受,您的選擇
高價回收安川伺服驅(qū)動器,松下A6系列伺服驅(qū)動器
西門子1214C系列PLC如何連接松下A6伺服驅(qū)動器
松下A6伺服驅(qū)動器通過modbus進(jìn)行RS232通訊案例
松下A6驅(qū)動器維修
與松下伺服A6可以通過兩種方式進(jìn)行通信
1214C系列PLC是如何連接松下A6伺服驅(qū)動器的
松下A6伺服,回收松下 :A4-A5 II系列 100W,200W,400,750W等伺服電機(jī)驅(qū)動器
請問松下A6伺服驅(qū)動器如何通過modbus進(jìn)行RS232通訊?
蘇州回收松下A5/A6系列伺服放大器伺服電機(jī)以及plc模塊
您必須掌握的電腦病毒知識匯集
A6伺服操作小妙招





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論