 自動駕駛的嬰兒學步—定速巡航
自動駕駛的嬰兒學步—定速巡航
無需駕駛員介入,解放人類的雙手、雙腳,讓汽車成為日常生活的第三空間,可以在乘車時進行觀影、音樂、購物等娛樂,能將乘客安全地送達目的地,這些是自動駕駛發展的最終目標,也是眾多汽車工程師在自動駕駛道路上一直追求、預期達到的結果。
目標雖如此,但想要讓其實現卻不是那么簡單,為了能夠實現最終目標,汽車工程師將目標階段化,即將自動駕駛實現的程度一步步來完成,國際汽車工程師學會根據自動駕駛環境中駕駛員參與駕駛程度不斷降低,自動駕駛系統參與駕駛程度不斷提升,可以實現自動駕駛范圍不斷擴大,限制不斷縮小,自動駕駛被分為L0級~L5級共6個等級,當達到L5級自動駕駛時,人類將可以擺脫控制汽車的需求,自動駕駛將可以完全實現。無論什么技術都不是一蹴而就的,自動駕駛的發展也并不是現象中那么簡單,就像教小孩子走路一樣,為了讓汽車可以實現自動駕駛,首先要教汽車如何去看路、如何去行走、如何去避讓等。
那如何讓汽車可以更快學會行駛?就像人類嬰兒學步一樣,首先要做的就是讓汽車模仿走路,比如告訴車輛如何行駛是正確的,先讓車輛可以在固定速度下自動行駛,而這一技術,便是定速巡航(CRUISECONTROLSYSTEM)縮寫為CCS。定速巡航作為高級輔助駕駛系統中較為早期的一項功能,現階段已經在眾多車輛上實現了搭載,定速巡航又稱為定速巡航行駛裝置、定速控制裝置等,駕駛員將車輛駕駛到規定車速后,開啟定速巡航功能,車輛便可以保持車速行駛。
定速巡航功能非常簡單,只能將車速保持在駕駛員預定的數值上,只能提供相對恒定的駕駛速度,且并不會根據實際情況對車輛的駕駛狀態進行調節或給予必要的預警提示,無法去應對多變的交通環境,因此,定速巡航系統的使用場景具有一定的限定范圍。原則上,定速巡航要在高速公路或全封閉的道路上使用,在諸如城市道路這種非封閉的道路上,交通環境千變萬化,前方車輛突然減速,行人忽然行駛到車輛前方等現象經常出現,定速巡航系統無法應對。對于高速公路這種環境封閉,行駛方向單一的場景,則是定速巡航的用武之地。當行駛在高速公路上時,定速巡航系統的使用可以減少駕駛員駕車動作,僅需觀察路況,必要時接管即可,可以減少駕駛員駕車疲勞,且車輛根據設定車速行駛時,還可以節省燃油消耗。
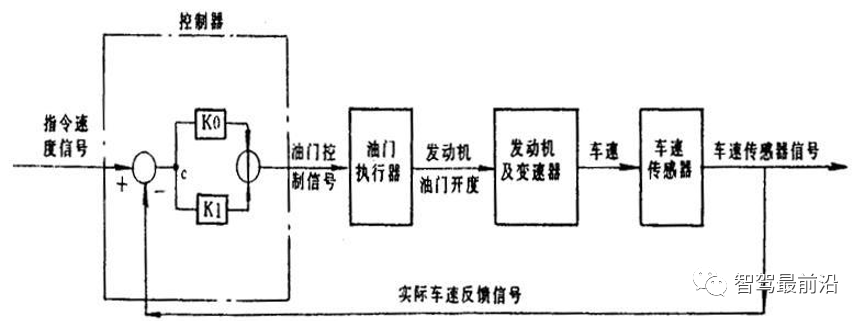
根據控制邏輯和控制方式對不同,現階段的定速巡航主要分為3種類型,即機械拉線式定速巡航、電子式定速巡航、電子智能式多功能定速巡航,機械拉線式定速巡航通過機械拉線式控制車輛、電子式定速巡航和電子智能式多功能定速巡航采用電子式控制車輛。定速巡航設定后,駕駛員可通過操作控制開關來實現手動加速、減速、記憶恢復等功能,通過踩踏加速踏板或制動踏板、關閉控制開關來解除定速巡航系統。機械拉線式定速巡航主要由控制開關、控制組件(巡航電腦)、伺服器(執行機構)組成,定速巡航的工作原理非常簡單,即由巡航控制組件讀取車速傳感器發出的脈沖信號與設定的速度進行比較,從而發出指令由伺服器機械地調整節氣門的開度變化,從而讓車速始終保持在預定速度。
機械拉線式定速巡航可適用于大部分拉線式油門的車輛,開發成本較低,但其控制精確度較低,由于是機械式控制,容易出現機械故障卡位的可能,安全性、卡可靠性較差,隨著汽車技術的發展,越來越多機械拉線式定速巡航被電子式定速巡航所取代。電子式定速巡航摒除了拉線式定速巡航器的機械控制部分,完全采用精準電子控制,使控制更精準,避免了機械故障帶來的風險,通過電子信號對汽車節氣門開度進行控制,安全性更高,可以消除油門失控的可能,但由于其通用性差,需要轉車專用,因此開發成本較高,普及性差。
如大眾高爾夫的多款發動機都采用了電子節氣門技術,使得發動機的進氣量不直接由加速踏板來控制,而是由電控單元采集分析諸多信號(如加速踏板位置信號、發動機轉速信號等)后通過控制節氣門開度來精確控制,也就是說,這幾款發動機的管理系統的電子節氣門控制已具備了驅動節氣門執行器的功能,因此可以很容易地將巡航控制功能集成到系統中,而通過實踐證明,高爾夫的這幾款發動機包括柴油發動機的控制單元中都預存有相應的巡航控制程序,只需激活就可使其運行。對于裝備自動變速器的高爾夫,系統通過調整發動機轉速(控制節氣門開度、噴油時間、點火提前角等)及變換變速器工作擋位實現按設定車速行駛。對于裝備手動變速器的高爾夫,巡航控制系統將在相應擋位下根據行車阻力自動增減節氣門開度,使汽車行駛速度保持一定。使用定速巡航功能不僅能大大地減輕駕駛員的疲勞強度,并且由于巡航控制系統能自動地維持車速,避免了不必要的加速踏板的人為變動,從而改善了汽車燃料經濟性和發動機的排放性能,也就是說,會明顯地降低油耗,這一點可通過高爾夫儀表上多功能顯示器顯示的瞬時油耗很直觀地看出來。
定速巡航由于使用場景有限,且安全性無法確保,與自動駕駛的最終目標依舊相差很遠,但定速巡航的出現為自動駕駛的發展奠定了技術基礎,正如嬰兒學步需要慢慢地學習,定速巡航系統,也為自動駕駛的發展跨出了第一步。隨著汽車技術的發展,定速巡航的功能也已經得到了極速發展,更為智能的自適應巡航功能也應運而生,相較于定速巡航,自適應巡航可以適用于更多的道路情況,可以在駕駛員不干預的情況下,對汽車進行自動化調整,進一步提升了安全性和舒適性。技術的發展就是如此,在0到1的發展過程中,會出現諸多的困難和阻礙,也可能只是跨出了很小的一步,但這很小的一步,卻是最終目標實現過程中關鍵一步,自動駕駛的發展還有很長的路要走,但終究會實現。
審核編輯黃宇
-
自動駕駛
+關注
關注
784文章
13786瀏覽量
166399 -
定速巡航
+關注
關注
0文章
5瀏覽量
2185 -
汽車
+關注
關注
13文章
3494瀏覽量
37256
發布評論請先 登錄
相關推薦
AK2超聲波雷達:自動駕駛低速巡航的精準感知來源

一文聊聊自動駕駛測試技術的挑戰與創新

自動駕駛汽車安全嗎?


自動駕駛技術的典型應用 自動駕駛技術涉及到哪些技術








 工商網監
工商網監
評論