
RPC(Remote Procedure Call Protocol)即遠程過程調用,也就是調用的函數是在其它的控制板上運行的,不需要理會底層的通訊協議。現在大型設備通常有超過5塊控制板,這些控制板通過485/CAN/以太網組成一個局域網。通訊協議可以使用Modbus或者自定義。。。
多模塊組網,實現模塊化,減少電氣布線便于維護:
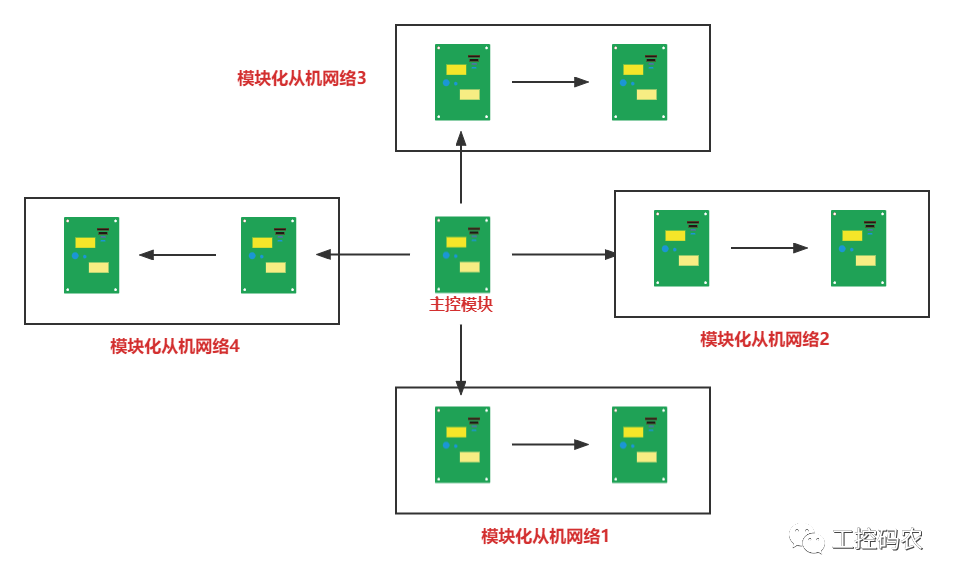
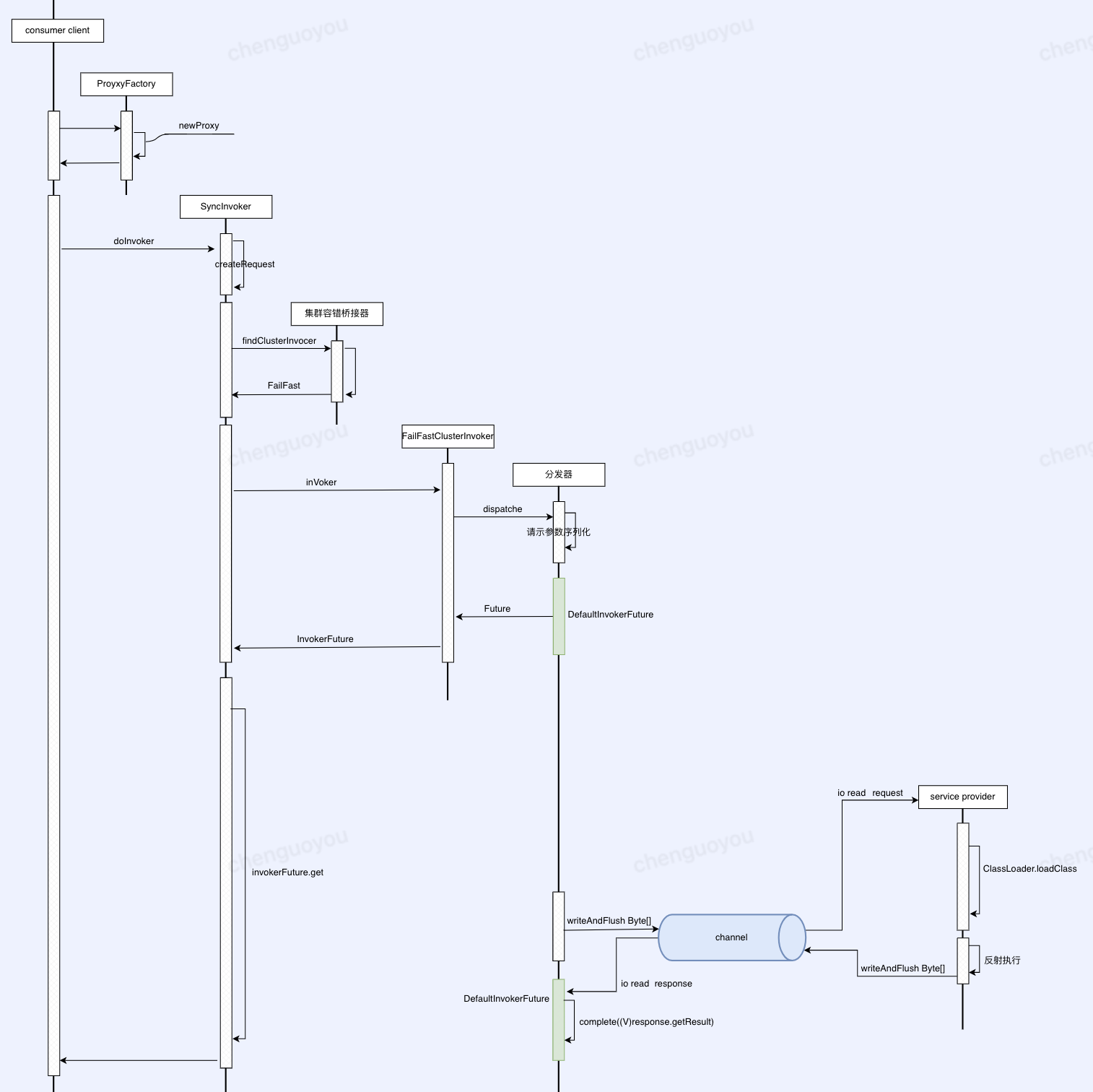
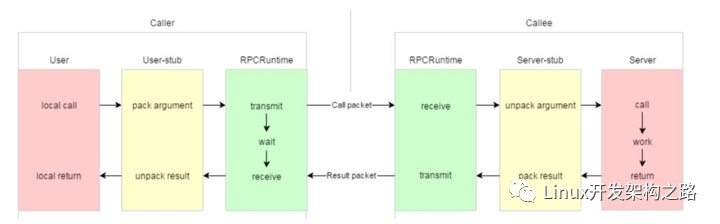
遠程調用數據流:

這些控制板的硬件基本都一樣(電機,傳感器。。),底層驅動程序也一樣,只是上層的業務邏輯的差別,在驅動層封裝一層rpc,能進一步簡化業務邏輯開發,使得控制從機的電機 動作和本機的函數接口一樣.
動作 傳感器映射
映射是把本地動作編號 傳感器編號映射到從機模塊的動作編號和傳感器編號,這個是在上電初始化時完成.
enum
{
HOST=0,//本機編號
SLAVE1,
SLAVE2,
};
l->MapRemoteAction(201,SLAVE1,1); //動作201映射到從機1的1號動作
l->MapRemoteAction(301,SLAVE2,1); //動作301映射到從機2的1號動作
l->MapRemoteSensor(X201,SLAVE1,X01);//把傳感器X201映射到從機的X01
SLAVE1,SLAVE2是從機模塊編號,通常是電路板上的撥碼開關決定的.RPC組包時會把這些模塊編號放在頭部.
業務代碼:
start(App):
l->WaitAction(201,STEP2,STEP_ERROR); //執行從機1動作201,動作正確完成就跳到step2,錯誤step_error
step2:
if(l->IsSenorOn(X201)) //從機1號傳感器感應
{
l->WaitAction(301,STEP_OK,STEP_ERROR); //執行從機2的動作
}
else
{
l->SetActionOk();
}
step_ok:
l->SetActionOk();
step_error:
l->SetSubError();
end
上面的業務代碼是沒有任何通訊相關的流程,只是一些簡單的函數調用和本地函數調用一模樣
RPC層
RPC層主要完成數據組包,實時數據通訊,從機的動作 電機運動都是耗時過程,需要一定的時間才能完成,那么主機端的rpc層就需要不斷查詢從機的狀態.App調用從機的動作時就同步等待從機的狀態變化后繼續向下執行.軟件實現上需要單獨一個線程或者類似于switch-case實時處理rpc的工作流程.

聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
RPC
+關注
關注
0文章
111瀏覽量
11747 -
函數
+關注
關注
3文章
4365瀏覽量
63906 -
通訊協議
+關注
關注
10文章
283瀏覽量
20668
發布評論請先 登錄
相關推薦
熱點推薦
TSMaster RPC 基礎入門:編程指導和使用說明
介紹RPC模塊前,我們先淺聊一下RPC的相關說明,以及在什么樣的情況下需要了解本文。1.RPC說明遠程過程調用(RPC,RemoteProc

如何手搓一個自定義的RPC 遠程過程調用框架
1、RPC(遠程過程調用概述) 遠程過程調用(RPC, Remote Procedure Call)是一種通過網絡從遠程計算機程序上請求服務
【學習打卡】OpenHarmony的RPC連接介紹
。遠程過程調用 (RPC)是一種用于構建基于客戶端-服務器的分布式應用程序的強大技術。它基于對傳統本地過程調用的擴展,因此被調用過程不必與
發表于 07-28 18:13
什么是RPC
什么是RPC 英文原義:Remote Procedure Call Protocol
中文釋義:(RFC-1831)遠過程調用協議
注 解:一種通過
發表于 02-23 11:48
?943次閱讀
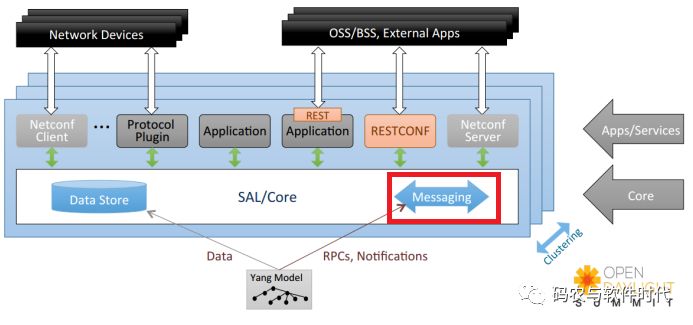
OpenDaylight中的RPC & Notification是什么
我們將介紹RPC和Notification,并從進程內外的通信開始,著重介紹遠程過程調用和發布-訂閱機制,然后分析MD-SAL的通信交互過程。
RPC接口與HTTP接口哪一個更好?
HTTP接口和RPC接口都是生產上常用的接口,顧名思義,HTTP接口使用基于HTTP協議的URL傳參調用,而RPC接口則基于遠程過程調用。
發表于 06-13 09:18
?1592次閱讀

基于Client/Server架構的HTTP接口和RPC接口
HTTP接口和RPC接口都是生產上常用的接口,顧名思義,HTTP接口使用基于HTTP協議的URL傳參調用,而RPC接口則基于遠程過程調用。
發表于 06-13 09:18
?908次閱讀

RPC接口和HTTP接口的區別與聯系
基于遠程過程調用。 RPC(即Remote Procedure Call,遠程過程調用)和HTTP(HyperText Transfer Protocol,超文本傳輸協議),兩者前者是一種方法,后者則是一種

什么是遠程過程調用
開發環境:Ubuntu VS Code 編譯器:g++ 編程語言:C++ 框架源碼下載:GitHub 認識RPC RPC的全稱是遠程過程調用(Remote Procedure Call
Dubbo源碼淺析(一)—RPC框架與Dubbo
一、什么是RPC 1.1 RPC概念 RPC,Remote Procedure Call 即遠程過程調用,與之相對的是本地服務調用,即LPC
RPC的基本原理和主要特點
RPC(Remote Procedure Call,遠程過程調用)機制是一種常用的通信機制。實際上就是要像調用本地的函數一樣去調遠程函數。






 工商網監
工商網監

評論