 KUKA:接通運動的碰撞識別
KUKA:接通運動的碰撞識別
碰撞識別概覽
如果一個機器人與一個物件發生碰撞,則機器人控制器將提高軸扭矩,以便克服阻力。這時可能會損壞機器人、工具或其它零部件。
碰撞識別將減小此類損壞的風險。碰撞識別系統監控軸轉矩。如果該轉矩超過極限值,將出現以下反應:
?機器人以 STOP2停止。
?信息 確認軸 {軸編號}的碰撞識別
?機器人控制器調用程序 CollDetect_UserAction。
程序位于文件夾 R1Program中。默認情況下,它不含指令。在需要 時,用戶可以在CollDetect_UserAction中編程其所需的反應。對此的前提條件是專家或更高級別的用戶組。
碰撞識別的基本前提是:
? $IMPROVED_COLLMON ==TRUE
?負載數據正確。
TORQMON (舊的)
在早期 KSS版本中的程序中可能仍使用通過行指令 TORQMONSetLimits 編程的力矩監控。該監控基本上仍功能正常并且顯示出其早期特性。
但是,前提條件是:$IMPROVED_COLLMON == FALSE。因此,當前版本的碰撞識別不可用。
基本上只能使用舊的力矩監控 (TORQMON) 或者當前的碰撞識別。不能一起使用這兩個功能。
即使在 $IMPROVED_COLLMON == FALSE 時,也不(!)可再編程之前的行指令 TORQMON。
在碰撞之后繼續運行
如果有信息 確認軸 {軸編號} 的碰撞識別,則在可以重新運行機器人之前, 必須對其進行確認。如果不再有 $STOPMESS,信號 $COLL_ALARM 重新變為FALSE。
程序運行下的繼續運行:
如果在識別到的碰撞之后繼續程序運行(通過啟動或啟動反向),則該識別立即重新激活。
手動運行下的繼續運行:
如果要在識別到的碰撞之后手動運行,則自動中斷識別 60 ms。
安全回退
在碰撞之后,作用力和力矩對機器人軸的作用很強,使識別功能可以持續地防止繼續運行。用戶必須手動退回機器人,即從碰撞位置移出。
有以下方法退回機器人:
?通過運行鍵(手動移動選項,選項 軌跡)反向運行
自動取消碰撞識別 1 秒。機器人延之前運行的軌跡返回。
?手動移動選項,選項 跨接碰撞識別
用戶可以通過復選框跨接即停用碰撞識別。在通過復選框重新激活之前保持不激活狀態。
接通通用碰撞識別
操作步驟:接通
1. 選擇指令 》 移動參數 》 碰撞識別。
2. 在行指令中選擇條目 UseDataSet。
3. 在 DataSet 欄內選擇應用于碰撞識別的數據組。

4. 按下 指令 OK 確認。
操作步驟:關斷
1. 選擇指令 》 移動參數 》 碰撞識別。在行指令中選擇 Off。

2. 按 指令 OK 鍵確認。
為了接通運動的碰撞識別功能,用戶可在運動行指令中選擇一個數據組。同時接通了通用和運動上的碰撞識別:
可能同時接通了通用碰撞識別和運動碰撞識別。運動上的設置將覆蓋通用設置。
樣條段:
在樣條組內,默認情況下樣條段繼承該樣條組的設置。但是,用戶可以為每個段進行單獨的設置。
操作步驟:
1. 如果在行指令中不顯示欄 ColDetect,則可以通過 切換參數》 碰撞識別進行顯示。
2. 在行指令的 ColDetect下選擇數據組。
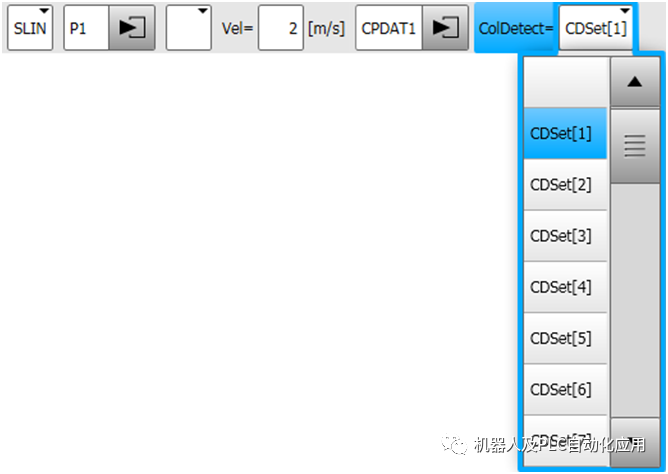
3. 用 指令 OK確認選擇。
在編輯器中,該指令現在包含補充ColDetect[編號]。

帶 ColDetect 的指令,例如SLIN 單個運動
空欄
在帶數據組的列表的頂部有一個空欄。如果選擇該空欄,這表示:
? 此運動沒有自己的碰撞識別設置。如果接通了通用碰撞識別,則它將繼承其設置。
在樣條段中,該列表不含空欄。
如果希望樣條段沒有自己的設置,則在必要時通過 切換參數 》 碰撞識別 隱藏 ColDetect 欄。但是,對于段“隱藏”已經是默認狀態。
OFF
僅對于樣條段,數據組列表含有 OFF 條目。OFF 將關閉該段的碰撞識別。
在編輯器中顯示樣條設置
SPLINE S1 VEL=2 m/s CPDAT2 Tool[1] Base[1] ColDetect[1]
SLIN P2
SLIN P3 ColDetect[2]
SLIN P4 ColDetect=OFF
ENDPLINE
設置 ColDetect[1] 適用于樣條組。
SLIN P2 沒有自己的設置。這表示它將繼承樣條組的設置,即ColDetect[1]。
ColDetect[2] 適用于 SLIN P3。
為 SLIN P4 關閉了碰撞識別。
顯示當前值/窗口 碰撞識別 - 視圖
在主菜單中選擇配置 》 碰撞識別 》 視圖。
碰撞識別 - 視圖 窗口打開。

序號說明
1軸編號
2每個軸當前極限。這是程序運行的極限還是手動運行的極限,取決于機器人移動的方式。 該值越小,識別越靈敏。“0”表示該軸的識別未激活。此外,在學習模式下,學習模式偏差顯示為灰色。
3? 數字:當前峰值 ? 黑色垂直線條:配置的激活極限 ? 灰色垂直線條:有效極限 只有在學習模式和手動運行模式下,有效極限與配置的激活極限有所不同。 學習模式:極限由學習模式偏差決定。 手動運行:極限通過手動移動選項窗口中的 標準值偏量確定。 ? 彩色條:相對于極限的峰值綠色:峰值位于極限以下 紅色:峰值達到或超過極限。已識別到碰撞。
4顯示適用于當前運動的數據組。 手動運行模式下還會顯示點動信息。BCO 運行始終和手動運行數據一起執行。所以,也會在 BCO 運行期間以及直接在 BCO 運行后顯示點動。
5顯示最后一次峰值完成重置的時間點。
序號說明
6? 灰色:當前運動時碰撞識別未激活。 ? 綠色:當前運動時碰撞識別已激活。
7? 紅色:控制系統識別到碰撞。 ? 灰色:無碰撞。 如果碰撞識別未激活,則 LED 燈始終顯示為灰色。
8? 綠色:該學習模式已激活。 ? 灰色:該學習模式未激活。 如果碰撞識別未激活,則 LED 燈始終顯示為灰色。
9切換至 碰撞識別 - 數據組視圖 窗口。
10切換至 碰撞識別 - 數據組學習視圖 窗口。
行指令 SaveMax
出于兼容性原因,KSS 中仍有行指令 SaveMax:所以,包含 SaveMax 的早期KSS 版本的程序仍可繼續使用。
針對新程序,強烈建議不要通過 SaveMax 填充數據組,而是通過學習模式或通過窗口 碰撞識別 - 數據組配置!
SaveMax 主要可能導致顯示錯誤,尤其是在碰撞識別 - 視圖窗口中。
調用
1. 指令》移動參數》 碰撞識別
2. 在行指令中選擇條目 SaveMax。

行指令 SetDefault, SetLimits
出于兼容性原因,KSS 中仍有行指令 SetDefault 或 SetLimits:所以, 包括這些行指令的早期 KSS 版本的程序仍可繼續使用。
針對新程序,強烈推薦使用行指令 UseDataSet!
SetDefault和 SetLimits 主要可能導致顯示錯誤,尤其是在碰撞識別 - 視圖窗口中。
調用
?指令》移動參數》 碰撞識別
?在行指令中選擇條目 SetDefault或 SetLimits。
行指令 SetDefault
將 $custom.dat 中的默認值用于碰撞識別。

行指令 SetLimits
為每個軸指定所需的碰撞識別靈敏度。默認:50 %

審核編輯 :李倩
-
控制器
+關注
關注
112文章
16404瀏覽量
178636 -
機器人
+關注
關注
211文章
28525瀏覽量
207576
原文標題:KUKA : 接通運動的碰撞識別
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
射頻識別系統中的防碰撞算法設計
水銀開關式碰撞傳感器的識別
滾軸式碰撞傳感器的識別
偏心錘式碰撞傳感器的識別
滾球式碰撞傳感器的識別
KUKA庫卡機器人伺服驅動器相關型號舉例
CAD中怎么進行碰撞檢測?CAD碰撞檢測教程
基于多比特識別的射頻識別防碰撞算法
基于多比特識別的射頻識別標簽防碰撞算法
多維編碼逐維識別RFID防碰撞算法
人臉識別碰撞智慧機場 新科技不斷擦出火花
一文詳解KUKA機器人的碰撞識別

KUKA的碰撞識別(KSS版)






 工商網監
工商網監
評論