 STM系列CAN通信一體化步進電機電機快速使用教程
STM系列CAN通信一體化步進電機電機快速使用教程
本教程適用于立邁勝STM系列CAN通信一體化步進電機電機上位機連接調試。本文所用軟件與說明書獲取方式在文末處說明。
一、前期準備
軟件環境準備
(參考《SCM-USBCAN-LB&SCM-USBCANI-LB 通信轉換器產品使用說明書》進行轉換器驅動的安裝)
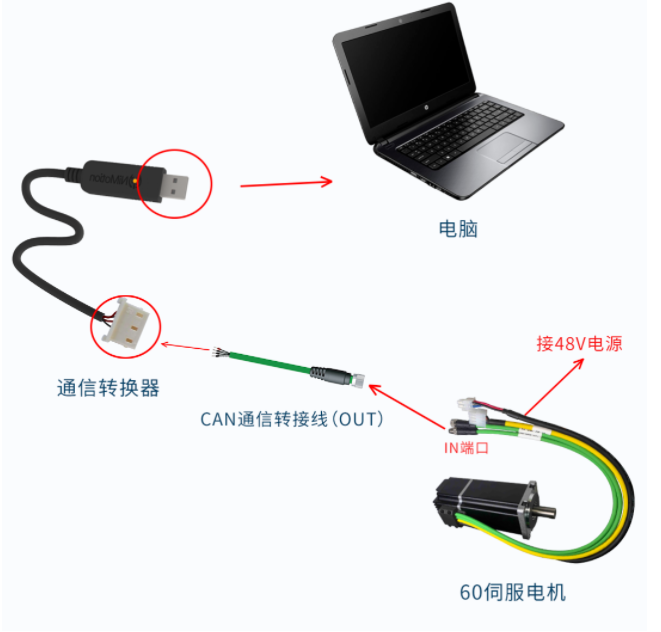
硬件環境準備
1.將“USB轉CAN轉換器”一端插到電機通信接口,另一端插電腦USB接口。
2.電機直流供電(根據電機使用說明書,對應電機型號在額定范圍內直流供電)。
下圖為電機接線圖(以42電機舉例,28/57/86通用)

二、建立通訊
1.打開NiMotionCanIDE上位機軟件
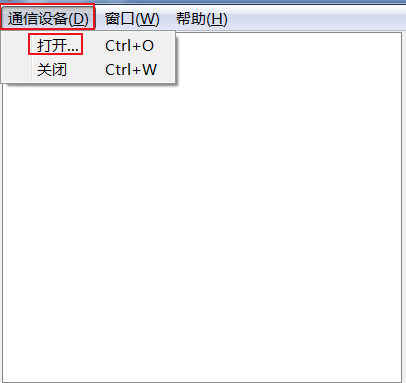
2.擊右左上方“通信設備”,點擊“打開”,如下圖。
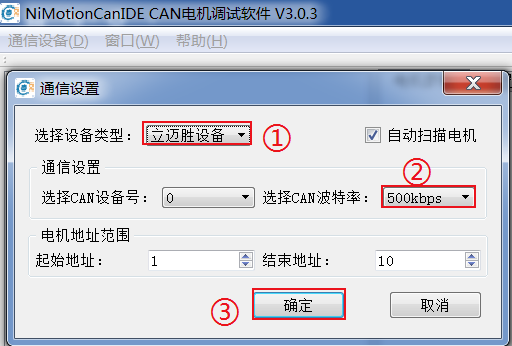
3.通信設置中:選擇設備類型“立邁勝設備”,選擇CAN波特率(默認500kbps),其它設置保持默認值,點擊“確定”,如下圖。
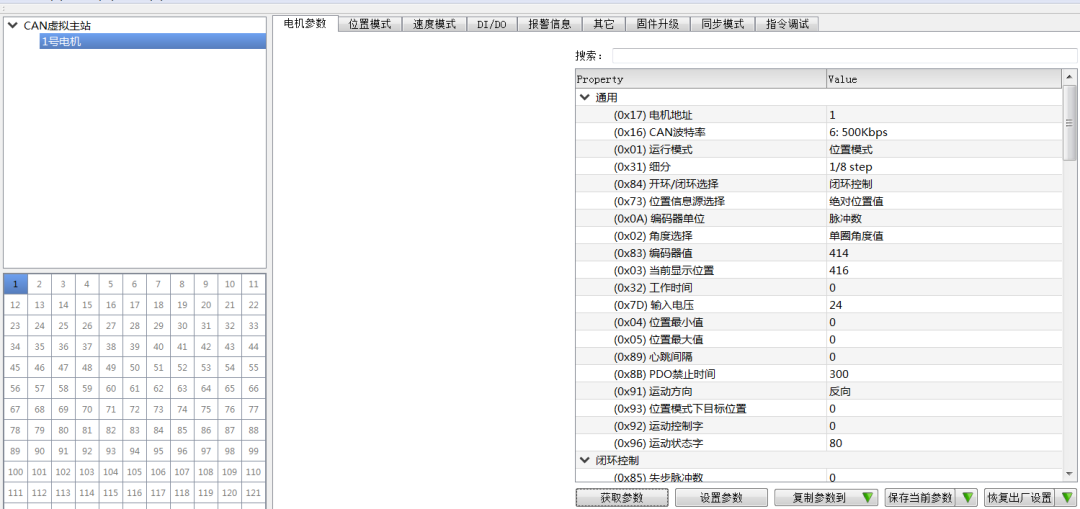
4.通信成功后的界面如下圖所示,CAN虛擬主站下面會有1號電機出現。
三、電機運行示例
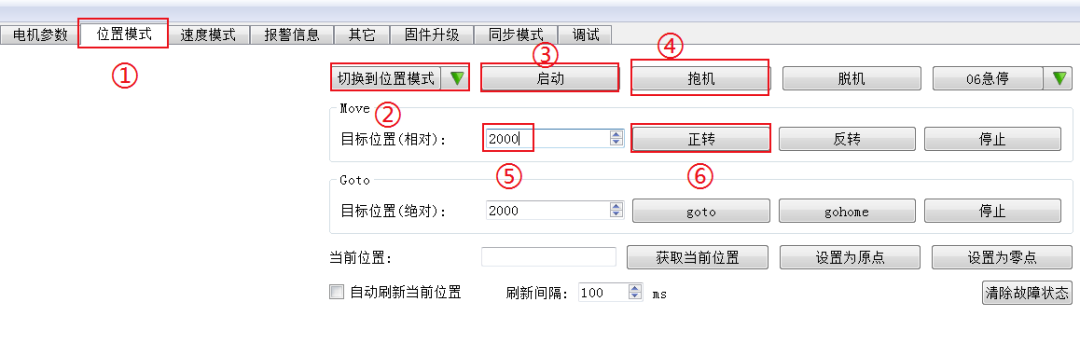
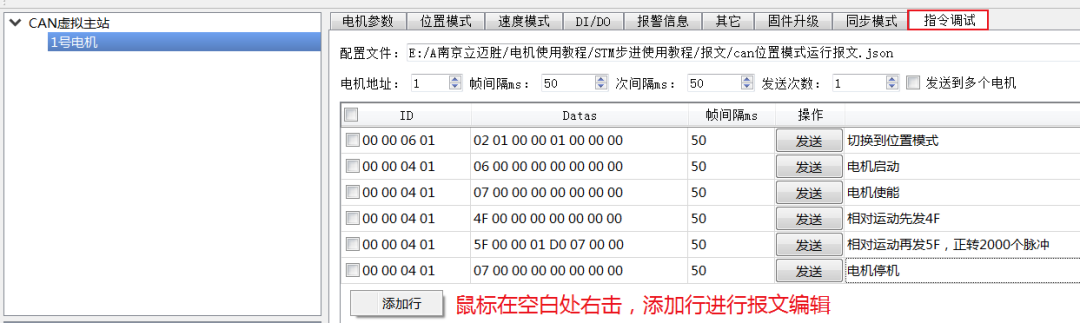
1.位置模式運行
操作順序如下圖:①位置模式界面;②電機切換到位置模式;③啟動;④使能;⑤給定位置值;⑥正轉或反轉
運動報文示例如下。
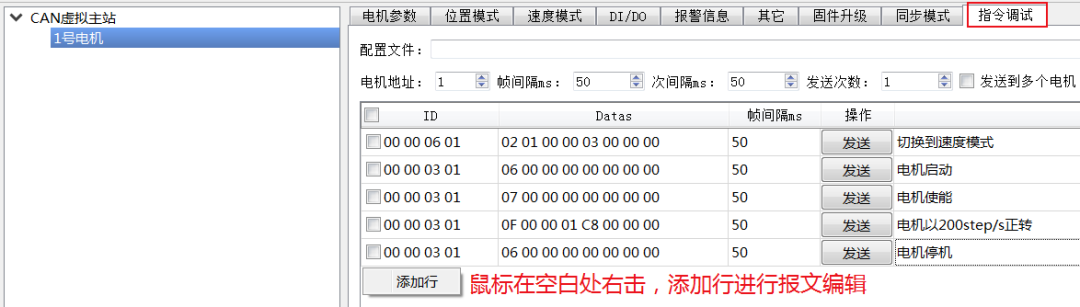
2.速度模式運行
操作順序如下圖:①速度模式界面;②電機切換到速度模式;③啟動;④使能;⑤給定速度值;⑥正轉或反轉

運動報文示例如下。
四、補充說明
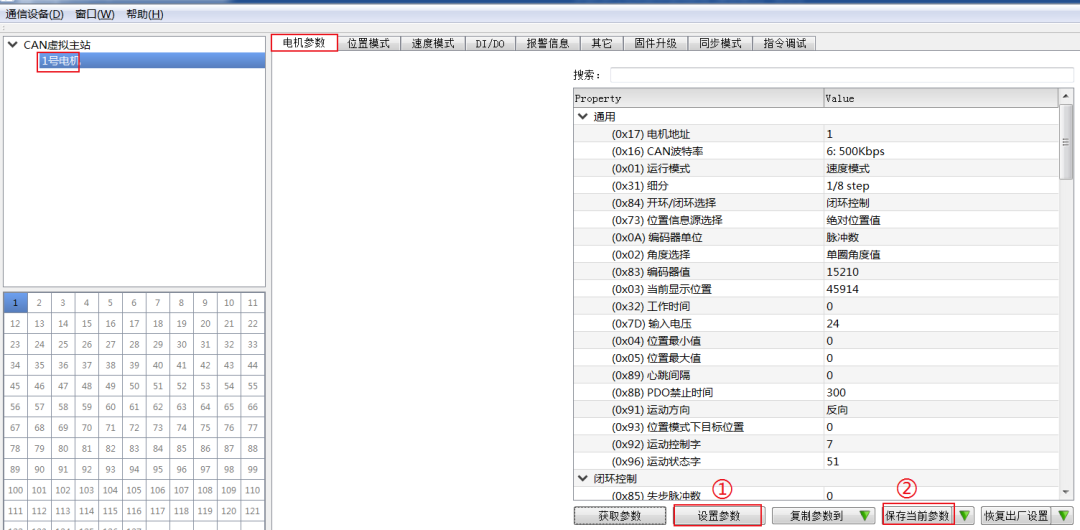
1.參數設置可在“電機參數”界面中設置,操作步驟:先①設置參數,再②保存當前參數,如下圖。
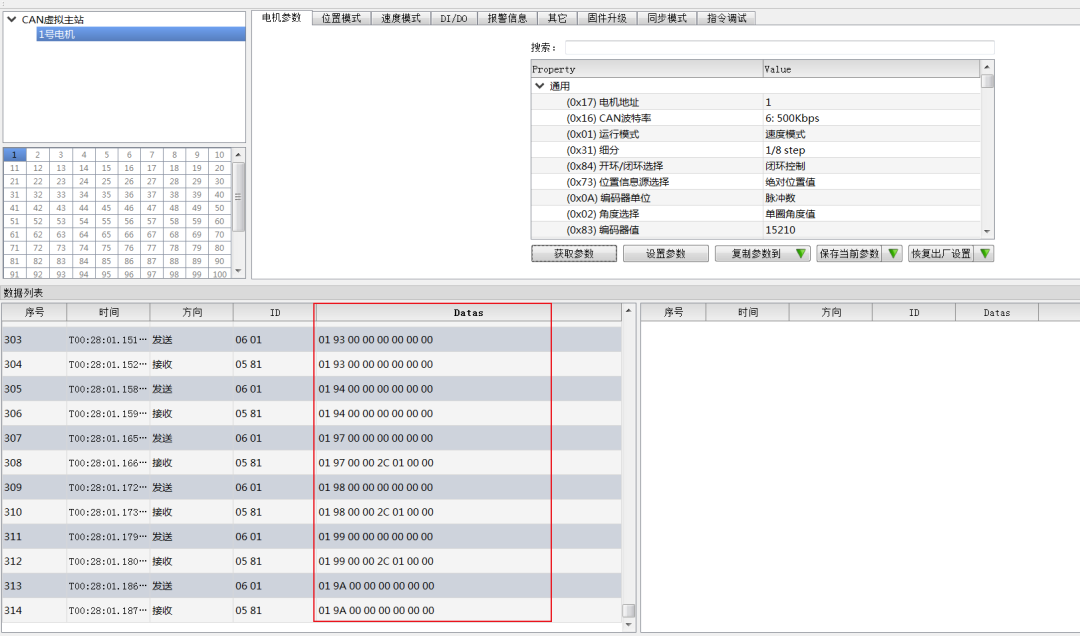
2.軟件左下角界面為實時報文。
3.電機應用詳細介紹可參照《STMxx 系列一體化步進電機 CAN 總線使用說明書》及《一體化步進電機 CAN 通訊用戶手冊》;
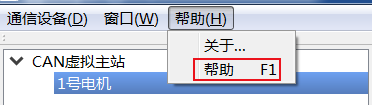
4.可點擊“幫助”查看軟件詳細介紹
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
CAN
+關注
關注
57文章
2744瀏覽量
463615 -
步進電機
+關注
關注
150文章
3109瀏覽量
147443 -
STM
+關注
關注
1文章
556瀏覽量
42437
發布評論請先 登錄
相關推薦
什么是機電一體化
機電一體化http://www.gooxian.com/article/show-1823.htm就是“利用電子、信息(包括傳感器、控制、計算機等)技術使機械柔性化和智能化”的技術1)
發表于 08-29 09:06
機電一體化系統
的運動。5) 計算機根據來自旋轉編碼器或測速發電機的信號,判斷機器人的當前狀態,并計算和判斷要達到所希望的狀態或者移動到某一目標應該如何動作。2.其它機電一體化系統機器人是實現人類
發表于 08-29 09:11
一體化伺服電機報警信息在哪個參數里面查看?
本文僅適用于立邁勝PMM系列一體化伺服電機出現的常見問題。如您的伺服電機是其他型號的請謹慎操作。解決方法如下:報警信息在哪個參數里面查看當前報警信息可查看H603F,當前設備報警數量可
發表于 06-28 06:28
CANopen通信一體化步進電機電機上位機連接調試
本教程適用于立邁勝STM系列CANopen通信一體化步進電機電機上位機連接調試。本文所用軟件與說明書獲取方式在文末處說明。
發表于 09-01 07:20
STM系列CANopen通信一體化步進電機電機快速使用教程
本教程適用于立邁勝STM系列CANopen通信一體化步進電機電機上位機連接調試。本文所用軟件與說明書獲取方式在文末處說明。

STM-M系列(高性能)CANopen通信一體化步進電機快速使用教程
本教程適用于立邁勝STM-M系列(高性能)CANopen通信一體化步進電機電機上位機連接調試。







 工商網監
工商網監
評論