 安防雷達助力智慧航運(STS1-13傳感器 船舶檢測,橋梁防撞,軌跡跟蹤)
安防雷達助力智慧航運(STS1-13傳感器 船舶檢測,橋梁防撞,軌跡跟蹤)
1.產品概述

STS1-13是一款高性價比的安防雷達產品,通過發射24GHz的電磁波,檢測物體反射回來的帶有多普勒效應的回波完成目標的探測和定位。該產品應用于檢測視野內的運動目標(例如人、車、船),匯報他們的距離、方位角和速度信息,支持多個目標同時匯報。基于以上匯報的準確信息,可配合攝像頭等光電設備進行跟蹤定位、身份識別和事件記錄。
安防雷達STS1-13可在多種場所發揮主動探測的作用,例如智慧航運、漁業防護、橋梁防撞、船流量監控、漁政管理等水域的船只探測;變電站、看守所、輸油管線等基礎設施的安防維護;機場周界安防、鐵路沿線安防、公路交通管控等通行設施的監控管制等。該雷達傳感器性能優良,價格優惠,接口開放,便于集成商匹配攝像頭或紅外等設備進行系統集成。
STS1-13安防雷達的主要特點:
1) 收發通道多:3發32收的調頻連續波(FMCW)雷達,相控陣體制。
2) 探測威力大:行人穩定探測超過1000米,車輛和船只穩定探測超過2000米。
3) 測量精度高:測角精度可達0.3°,測距精度2米。
4) 支持多個工作頻段,可避免同頻干擾問題。
5) 支持劃定防區,可有效屏蔽核心區域以外的誤報。
6) 采用機器學習算法,支持大小目標識別分辨,便于客戶針對性篩選目標。
7)雷達原廠支持,接口開放,便于系統集成和定制化開發。
STS1-13安防雷達雷達技術指標:
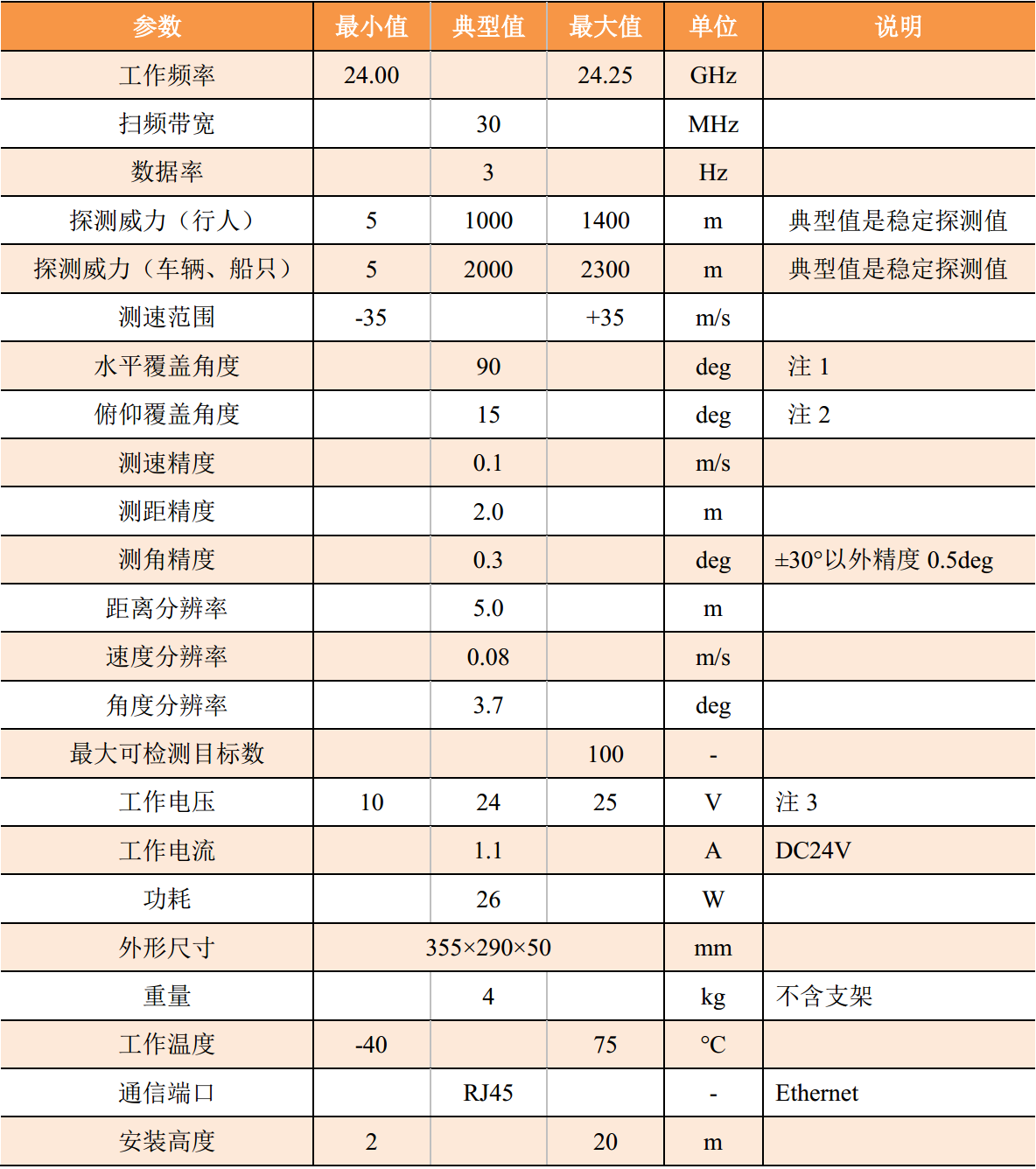
注1:雷達匯報的角度范圍可達±60°,以利于近距離大角度的目標發現,但角度越大相應的探測能力和測角精度都會下降。如果需要過濾某些位置的目標,可使用防區功能。
注2:雷達的法線(與前面罩垂直)方向探測威力最大,隨著俯(仰)角逐漸增大,其探測能力逐漸下降,當考慮盲區時,還應注意到此時目標距離雷達很近,并不需要很強的能量就可以探測到,所以盲區不用按照這里的標稱值計算,可參考下文的列表。
注3:建議供電采用直流24V,如果要用12V供電,需要考慮電源適配器與雷達間的直流電源延長線不宜太長(例如不超過10米),盡量避免由于壓降導致的雷達工作異常。產品標配24V適配器。
2.技術特點
安防雷達STS1-13是一款采用調頻連續波(FMCW)的相控陣雷達,該雷達采用了3個發射通道和32個接收通道的陣列天線設計。在每個發射波束工作時間內,所有的接收通道接收數據,同時形成多個接收波位(數字波束形成DBF),并在每個波位內進行恒虛警檢測(CFAR)形成點云信息,綜合運用點跡凝聚(DB-SCAN算法)和聯合概率數據關聯算法(JPDA)、卡爾曼(Kalman)濾波算法等雷達數據處理算法,最終輸出目標信息。扇面的電子掃描(E-scan)過程克服了機械掃描雷達的壽命短的問題。
當發射波位的指向改變時,對應地調整接收通道的相位因子,從而接收波位也完成相對應的指向,這樣配合的工作方式,使得雷達收發信號的指向性更強,能量更集中,從而增強雷達的探測能力;加上SFC(靈敏度頻率控制)電路的作用,雷達可以具備高動態(HDR)范圍,可適用于不同場景下的目標探測;同樣得益于合成的窄波束的設計,提升了雷達抗干擾和抗多徑的能力。
2.1雷達坐標系
雷達匯報的目標位置信息,是以雷達所在位置為坐標原點的。
(1) 雷達正前方為Y軸(對應目標的縱向距離),與Y軸垂直的是X軸(對應目標的橫向距離)。Y軸左側的目標橫向距離為負數,Y軸右側的目標橫向距離為正數。
(2) 假設圖中目標A在遠離雷達,其X0 = -3米(注意是負數),Y0 = 50米,速度v=1.5m/s(遠離目標的速度為正)。 則目標距離雷達的徑向距離R為50.1米。角度φ=arctan(-3/50) = -3.4°(注意目標在左側,角度為負數)。
定制開發下,可輸出目標的經緯度信息。
3.實測效果
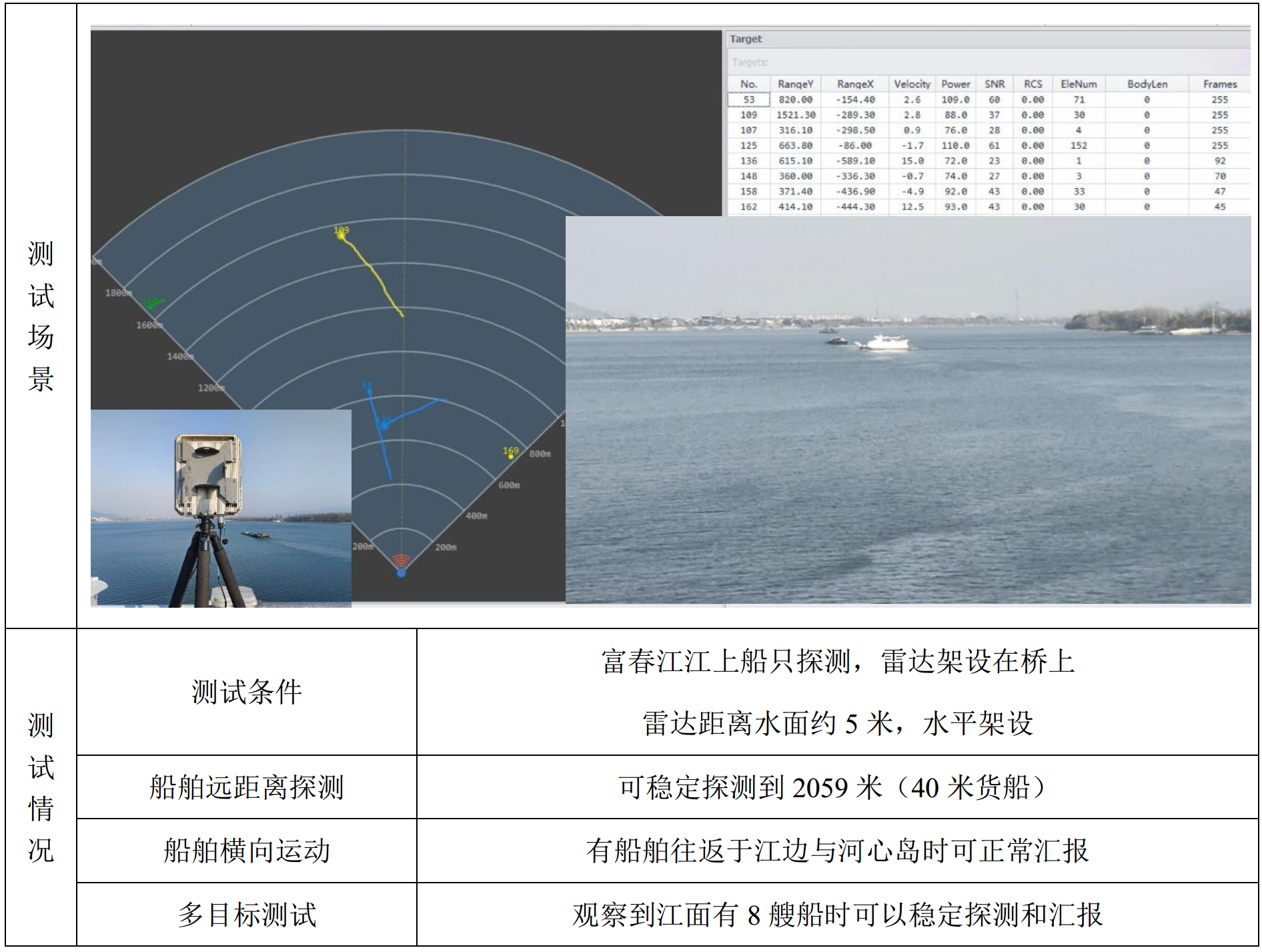
STS1-13船只探測效果,探測距離超過2000米
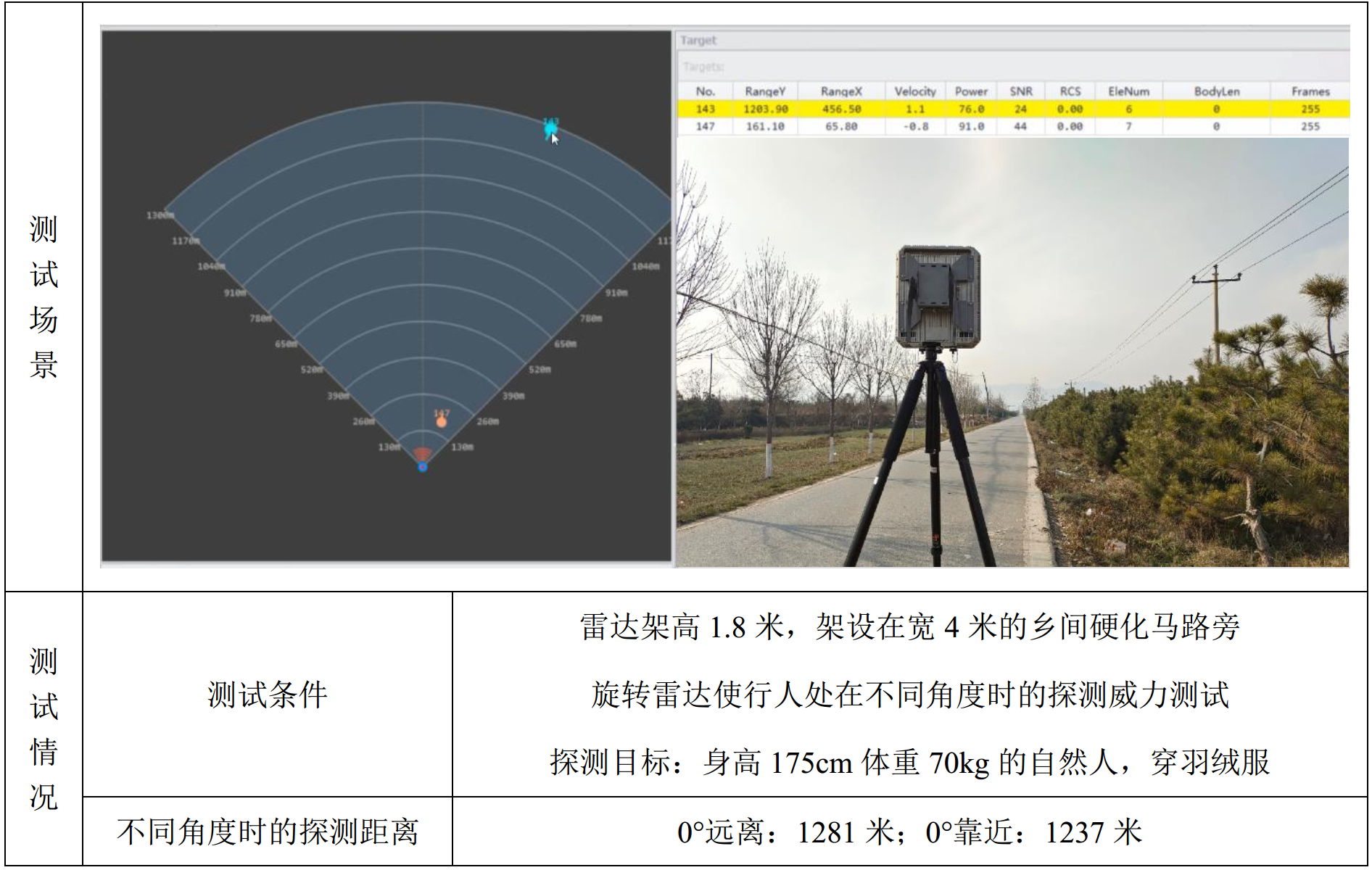

STS1-13行人探測,探測距離超過1000米
附錄:STS1-13產品解讀
問:STS1-13定位的應用方向是什么?
答:在水域和陸地都可應用。雷達作為智能感知的重要技術手段,可為智慧航運提供基礎性原生信息。充分挖掘這些信息,將有利于船舶運行數據采集、航道船流量信息統計、船只航線跟蹤和智能駕駛,以及航道規劃輔助決策等大數據信息的搜集工作。將雷達技術與水運行業深度融合,可推動水上交通運輸領域新型基礎設施的建設。另外在水上執法、緝毒緝私、打擊跨境偷渡等公安方向也可應用。在陸地應用方面,STS1-13可用于關鍵基礎設施的周界安防、行人入侵探測,或者要地防護等。典型應用例如機場周界安防、鐵路沿線安防、油氣管線防護等。
問:這款雷達有什么特殊之處嗎?
答:STS1-13有多達32個接收通道,探測威力大,測角精度高;采用24GHz成熟的軟硬件設計,批量化生產,性價比非常高。
32個通道進行數字波束形成(DBF),合成波束寬度約為3.1度,相當于雷達將能量集中到3.1度這么小的角度范圍內,所以探測能力更強。當然雷達需要同時進行很多個波束的計算,才能實現大角度的覆蓋能力,超高算力的信號處理能力,是開發工作的關鍵環節。
測角精度取決于雷達的波束寬度和目標的信噪比(SNR),在探測能力大(SNR高)的情況下加上波束寬度窄(只有3°,受其他角度雜波的影響小),所以測角精度也很高。
問:這款產品的實際探測能力的確能到參數表中的標稱值那么遠嗎,有沒有虛標?
答:沒有虛標。事實上這款雷達的探測能力是超過標稱的典型值的,不過的確存在應用場景不同時探測威力有差異的情況,這在有大型反射物或較多金屬反射物的場景中尤其明顯。一個面積A=2m×2m的公路路牌,其雷達截面積(RCS)約等于1.3×106m2,而一個人一般我們按照RCS=0.5m2計算,兩者相差非常大,大反射體帶來的回波太強,會導致雷達系統由于相噪引起的底噪抬高,從而降低弱目標的SNR,當SNR低于門限時小目標就檢測不出來了。
STS1-13采用優化了環路參數的射頻鏈路,盡最大可能地降低了不同場景下的差異性。另外產品規劃設計時,充分考慮到了這一問題,所以實測空曠場景下明顯優于列寫的典型值,復雜環境下也能滿足定義值。
問:這款雷達可以匯報目標的哪些信息?
答:STS1-13可以實時匯報目標相對于雷達的橫向距離、縱向距離、速度(運動方向)、信噪比,和探測到的目標長度信息。從雷達發出電磁波,到檢測和匯報目標出來,整體的時間延遲小于0.5秒,信息更新速率大約是3次/秒。雷達默認是以自身為坐標原點的,正前方是Y軸(前后算是縱向距離),左右是X軸(代表橫向距離)。雷達匯報的信噪比和目標長度信息可作為目標大小的判定依據。
如果必要,可定制化開發,支持目標的經緯度信息匯報。部分客戶有發現目標后開關量控制需求,可以按需定制。
問:在實際場景下,如何考慮安裝位置呢?
答:考慮河流上安裝的情況,其他場景類似。
如果在河岸上安裝,雷達的法線應與河流方向30-60°夾角,注意不要讓雷達法線垂直照向對岸。原因是如果一個目標在雷達前面橫穿,那么他面向雷達的速度非常小(理想的橫切運動,其面向雷達的速度為零),常常與靜止地物雜波混到一起,不利于目標檢出,此時如果強制檢出,可能誤報也會增多。
問:STS1-13可以測量多大速度的目標呢?
答:速度上限是,雷達可以測量到±120km/h的目標,正負號代表遠離或靠近的運動方向。速度下限是±2km/h(約±0.6m/s),更低速度的目標,雷達也具備一定的探測能力,但由于需要過濾掉接近零速的地物雜波(即濾除極低速的誤報),所以弱目標的檢出率將會明顯下降。
注意這里的速度值都是指目標面向雷達的速度值,這個值小于等于目標的真實速度,見下圖。
問:有的廠家用到77GHz或80GHz的雷達,STS1-13選用24GHz頻段基于哪些考慮呢?
答:目前大多數國家(含中國)已經將76-79GHz劃分給汽車雷達專用,從法規上說,再將這個頻段用于其他用途都是不合規的。79-81GHz這個頻率段主要發達經濟體也在考察用于汽車雷達,目前沒有明確的法規指定應用方向,仍存在不確定性。而24.0~24.25GHz是已經劃分好的全球通用的ISM頻段,可放心使用。
77-80GHz頻段的空衰比24GHz嚴重,在公里級雷達中這一點逐漸突出出來,而且探測距離越遠,差距越明顯。
從現有的技術能力來說,77-80G頻段的射頻部分輸出功率偏低(例如13dBm),這么高頻率的功率放大器件成本較高,一般雷達廠家不會選用,轉而考慮使用多發射通道(例如TDM或DDM技術),但整體提升有限,汽車雷達目前用這類器件做出的產品測車距離大約是300-500米(20°視野);24GHz頻段則有更為成熟的產業鏈,功率放大部分可達27dBm,同樣可考慮多通道設計,加上幾十個接收通道的接收機,雷達探測威力明顯更強。
(感謝閱讀,歡迎集成商接洽合作!)
審核編輯黃宇
-
傳感器
+關注
關注
2550文章
51042瀏覽量
753105 -
檢測
+關注
關注
5文章
4482瀏覽量
91444 -
雷達
+關注
關注
50文章
2930瀏覽量
117468
發布評論請先 登錄
相關推薦

24G雷達模塊LD2450 支持人體移動軌跡跟蹤與手勢識別

Sensirion發布高性價比溫度傳感器STS4L
AJ601PGAP1AA1AMA/E雷達傳感器和紅外傳感器優缺點對比
GUD8礦用本安性磁性傳感器檢測距離怎樣確定
迅為瑞芯微RK3568核心板橋梁監測設備接口應用
24GHz軌跡跟蹤人體感應雷達模組,可檢測區域內人員位置、數量
迅為RK3568核心板橋梁監測設備接口應用
OndoSense推出用于防撞和定位的新型雷達傳感器 可以檢測到0.1米的物體
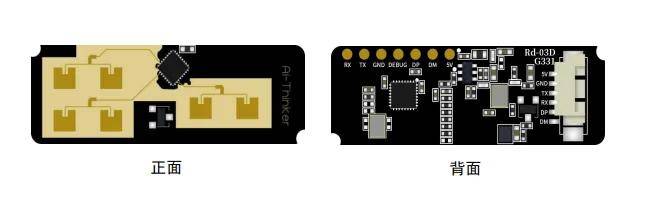
安信可雷達系列的超低功耗人體存在毫米波傳感器—Rd-03L
激光雷達船閘智能檢測解決方案

常用的焊縫自動跟蹤傳感器有哪些






 工商網監
工商網監
評論