") 萬(wàn)字講述汽車(chē)電子電氣架構(gòu)演進(jìn)
萬(wàn)字講述汽車(chē)電子電氣架構(gòu)演進(jìn)
汽車(chē)電子電氣架構(gòu)(EEA,Electrical/Electronic Architecture)把汽車(chē)中的各類傳感器、ECU(電子控制單元)、線束拓?fù)浜碗娮与姎夥峙湎到y(tǒng)整合在一起完成運(yùn)算、動(dòng)力和能量的分配,進(jìn)而實(shí)現(xiàn)整車(chē)的各項(xiàng)功能。
如果將汽車(chē)比作人體,汽車(chē)的機(jī)械結(jié)構(gòu)相當(dāng)于人的骨骼,動(dòng)力、轉(zhuǎn)向相當(dāng)于人的四肢,電子電氣架構(gòu)則相當(dāng)于人的神經(jīng)系統(tǒng)和大腦,是汽車(chē)實(shí)現(xiàn)信息交互和復(fù)雜操作的關(guān)鍵。
電子電氣架構(gòu)涵蓋了車(chē)上計(jì)算和控制系統(tǒng)的軟硬件、傳感器、通信網(wǎng)絡(luò)、電氣分配系統(tǒng)等;它通過(guò)特定的邏輯和規(guī)范將各個(gè)子系統(tǒng)有序結(jié)合起來(lái),構(gòu)成實(shí)現(xiàn)復(fù)雜功能的有機(jī)整體。
功能車(chē)時(shí)代,汽車(chē)一旦出廠,用戶體驗(yàn)就基本固化;智能車(chē)時(shí)代,汽車(chē)常用常新,千人千面,電子電氣架構(gòu)向集中化演進(jìn)是這一轉(zhuǎn)變的前提。
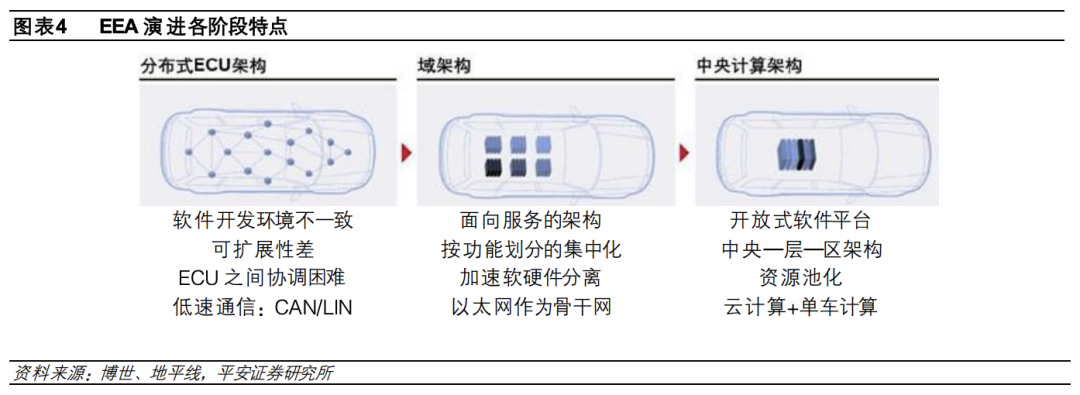
從分布式到域控制再到集中式,隨著芯片和通信技術(shù)的發(fā)展,電子電氣架構(gòu)正在發(fā)生巨大的變化。
1.1 分布式電子電氣架構(gòu)不堪重負(fù)
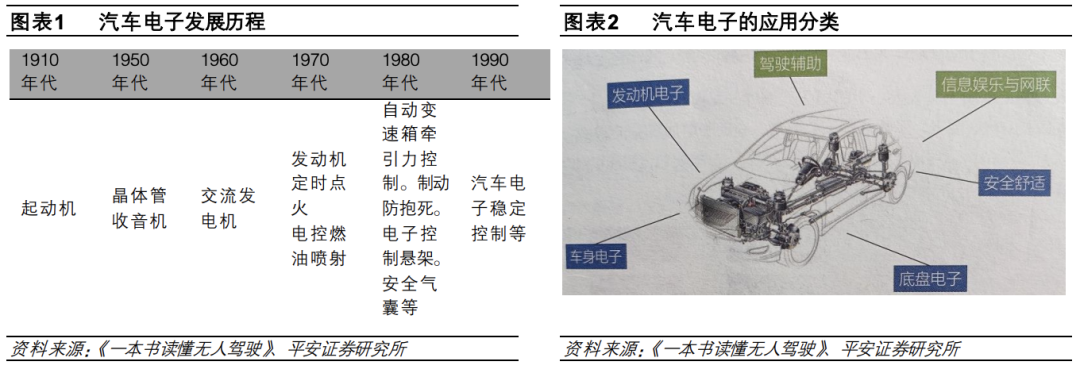
汽車(chē)誕生之初是個(gè)純機(jī)械產(chǎn)品,車(chē)上沒(méi)有蓄電池,車(chē)上的設(shè)備亦不需要電力,1927 年博世開(kāi)發(fā)出鉛蓄電池,從此車(chē)上的電子設(shè)備才有了可靠的電力來(lái)源。
大規(guī)模集成電路的發(fā)展讓汽車(chē)電子得以快速發(fā)展,發(fā)動(dòng)機(jī)定時(shí)點(diǎn)火控制系統(tǒng)、電控燃油噴射系統(tǒng)、自動(dòng)變速箱控制系統(tǒng)、牽引力控制系統(tǒng)、電控懸架系統(tǒng)、電控座椅、電控車(chē)窗、儀表、電控空調(diào)、汽車(chē)電子穩(wěn)定控制系統(tǒng)等,逐步成為了汽車(chē)不可或缺的組成部分。
汽車(chē)電子控制技術(shù)逐步發(fā)展壯大,為消費(fèi)者提供了更高性能、更舒適、更安全的出行工具。
早期分布式的電子電氣架構(gòu)下,每個(gè) ECU 通常只負(fù)責(zé)控制一個(gè)單一的功能單元,彼此獨(dú)立,分別控制著發(fā)動(dòng)機(jī)、剎車(chē)、車(chē)門(mén)等部件,常見(jiàn)的有發(fā)動(dòng)機(jī)控制器(ECM)、傳動(dòng)系統(tǒng)控制器(TCM)、制動(dòng)控制器(BCM)、電池管理系統(tǒng)(BMS)等。
各個(gè) ECU 之間通過(guò) CAN(Controller Area Network,控制器域網(wǎng)絡(luò))總線或者 LIN(Local Interconnect Network,局部互聯(lián)網(wǎng)絡(luò))總線連接在一起,通過(guò)廠商預(yù)先定義好的通信協(xié)議交換信息。
隨著整車(chē)電子電氣產(chǎn)品應(yīng)用的增加,ECU 的數(shù)量從幾十個(gè)快速增加到 100 多個(gè),ECU 數(shù)量越多,對(duì)應(yīng)的總線的線束長(zhǎng)度必將越長(zhǎng),線束重量也相應(yīng)增加(2007 年上市的奧迪 Q7 和保時(shí)捷卡宴的總線長(zhǎng)度超 6km,總重量超 70kg,是全車(chē)重量?jī)H次于發(fā)動(dòng)機(jī)的部件),這就導(dǎo)致整車(chē)成本增加、汽車(chē)組裝的自動(dòng)化水平低。
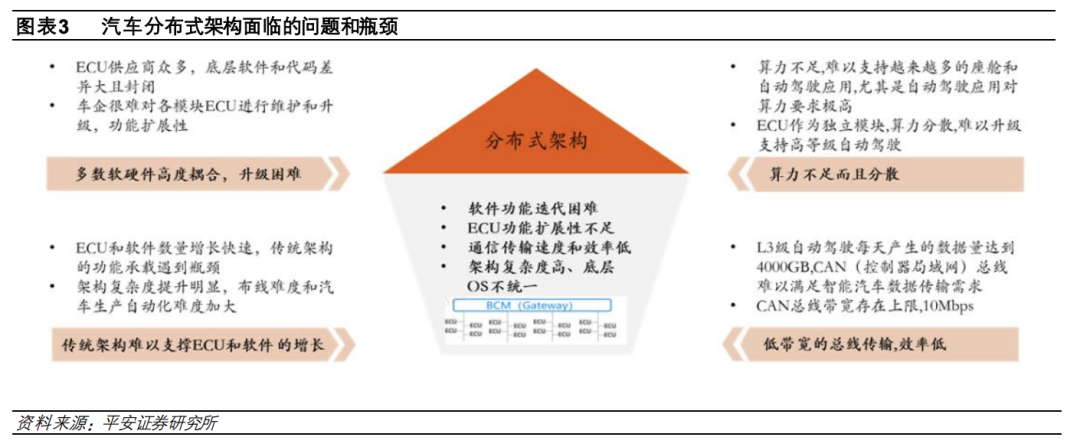
分布式計(jì)算導(dǎo)致了車(chē)內(nèi)信息孤島、算力浪費(fèi)、軟硬件耦合深,主機(jī)廠嚴(yán)重依賴供應(yīng)商。
傳統(tǒng)汽車(chē)供應(yīng)鏈中,不同的 ECU 來(lái)自不同供應(yīng)商,不同的硬件有不同的嵌入式軟件和底層代碼,整車(chē)軟件實(shí)際上是很多獨(dú)立的、不兼容的軟件混合體,導(dǎo)致整個(gè)系統(tǒng)缺乏兼容性和擴(kuò)展性。
車(chē)廠要進(jìn)行任何功能變更都需要和許多不同的供應(yīng)商去協(xié)商軟硬件協(xié)調(diào)開(kāi)發(fā)問(wèn)題,每新增一個(gè)新功能都需要增加一套 ECU 和通信系統(tǒng),耗時(shí)長(zhǎng),流程繁瑣。且由于每個(gè) ECU 綁定一個(gè)具體功能,無(wú)法實(shí)現(xiàn)橫跨多個(gè) ECU/傳感器的復(fù)雜功能,亦無(wú)法通過(guò) OTA(Over-the-Air)來(lái)保持汽車(chē)軟件的持續(xù)更新。
分布式電子電氣架構(gòu)導(dǎo)致通信帶寬瓶頸。
智能網(wǎng)聯(lián)車(chē)功能越來(lái)越復(fù)雜,車(chē)輛傳感器數(shù)量增加,由此產(chǎn)生的數(shù)據(jù)傳輸及處理的實(shí)時(shí)性要求提高,汽車(chē)內(nèi)部網(wǎng)絡(luò)通信數(shù)據(jù)量呈指數(shù)級(jí)增長(zhǎng)趨勢(shì),傳統(tǒng)的 FlexRay、LIN 和 CAN 低速總線已無(wú)法提供高帶寬通信能力,也無(wú)法適應(yīng)數(shù)據(jù)傳輸及處理的實(shí)時(shí)性要求。
我們用一個(gè)具體的例子來(lái)說(shuō)明分布式電子電氣架構(gòu)下的弊端:
假設(shè)車(chē)廠需要修改一個(gè)雨刷總成的功能,由于每一款車(chē)在開(kāi)發(fā)流程中的既定節(jié)點(diǎn)上,都要對(duì)雨刷總成進(jìn)行定義、標(biāo)定和驗(yàn)證,后續(xù)修改即相當(dāng)于二次開(kāi)發(fā),車(chē)企需要重新和雨刷供應(yīng)商簽合同,重新做各個(gè)層級(jí)的標(biāo)定和驗(yàn)證。顯然這樣一種面向硬件的工程化體系和流程,在車(chē)輛越來(lái)越復(fù)雜的未來(lái),是無(wú)法支撐產(chǎn)品的快速迭代進(jìn)化的。
解決之道就是把硬件標(biāo)準(zhǔn)化。雨刷總成是一個(gè)電機(jī)驅(qū)動(dòng)的機(jī)械部件,雨刷所需的傳感器可調(diào)用車(chē)輛上搭載的攝像頭或其他傳感器,一旦感應(yīng)到擋風(fēng)玻璃透明度下降,車(chē)輛即可通過(guò)軟件控制讓雨刷自動(dòng)啟動(dòng)合適的工作模式,這就實(shí)現(xiàn)了軟件定義雨刷功能的目的。當(dāng)各種不同的總成、模塊都標(biāo)準(zhǔn)化以后,就可以通過(guò)中央控制器里的軟件來(lái)實(shí)現(xiàn)更高等級(jí)的智能,就像手機(jī)上運(yùn)行的多個(gè) APP,既可大幅縮短產(chǎn)品開(kāi)發(fā)周期,也可廣泛采用標(biāo)準(zhǔn)化的零部件,有助于企業(yè)控制成本和質(zhì)量。比如一家零部件企業(yè)開(kāi)發(fā)和生產(chǎn)一款標(biāo)準(zhǔn)化的雨刷,然后賣(mài)給各家整車(chē)企業(yè),其價(jià)格會(huì)非常便宜;同時(shí),標(biāo)準(zhǔn)化硬件的標(biāo)定和驗(yàn)證都可適當(dāng)簡(jiǎn)化,從而進(jìn)一步節(jié)省開(kāi)發(fā)時(shí)間和成本。
1.2 汽車(chē)電子電氣架構(gòu)向中央計(jì)算邁進(jìn)
汽車(chē)分布式電子電氣架構(gòu)已不能適應(yīng)汽車(chē)智能化的進(jìn)一步進(jìn)化。高度集成是解決之道。
基于少量高性能處理器打造汽車(chē)的“大腦”,通過(guò)一套新型的電子電氣架構(gòu),形成快速傳遞信息的“神經(jīng)網(wǎng)絡(luò)”和“血管”,以控制和驅(qū)動(dòng)所有電子件和傳感器。
少量的高性能計(jì)算單元替代過(guò)去大量分布式 MCU(微控制單元),多個(gè)分散的小傳感器集成為功能更強(qiáng)的單個(gè)傳感器,汽車(chē) 、功能逐步整合集中,ECU 的減負(fù)意味著把整車(chē)原先搭載的幾十上百個(gè) ECU逐一進(jìn)行軟硬件剝離,再把功能主要通過(guò)軟件遷移到域控制器(域控制器是指域主控硬件、操作系統(tǒng)、算法和應(yīng)用軟件等幾部分組成的整個(gè)系統(tǒng)的統(tǒng)稱)中,如自動(dòng)駕駛、娛樂(lè)、網(wǎng)關(guān)等,在域控制器架構(gòu)的基礎(chǔ)上,更進(jìn)一步把不同功能的域進(jìn)行整合,就到了跨域融合階段,再進(jìn)一步到中央計(jì)算+位置域階段。
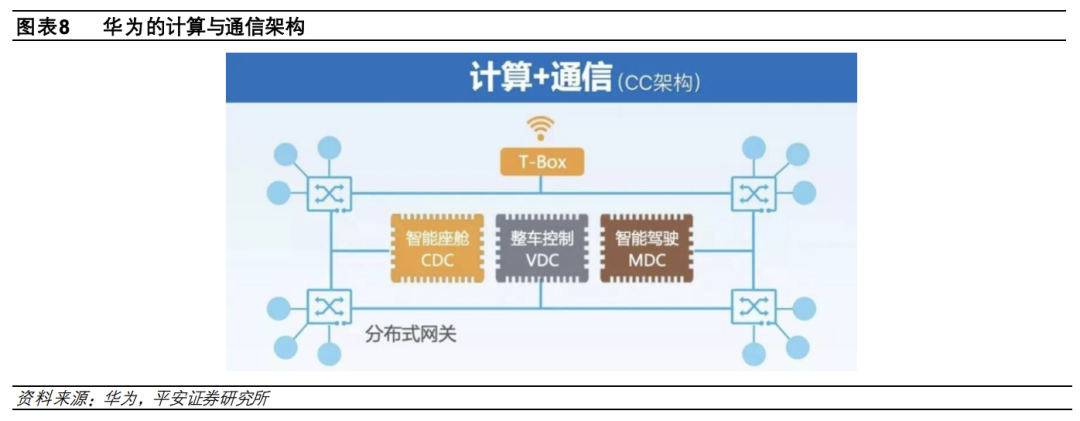
華為判斷到 2030 年電子電氣架構(gòu)將演進(jìn)為中央計(jì)算平臺(tái)+區(qū)域接入+大帶寬車(chē)載通信的計(jì)算和通信架構(gòu)。
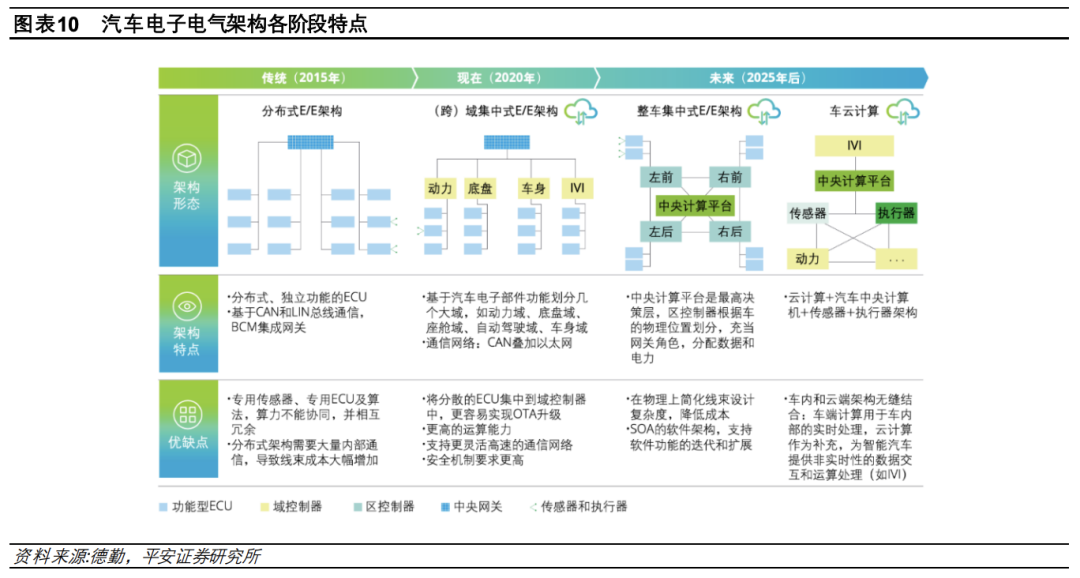
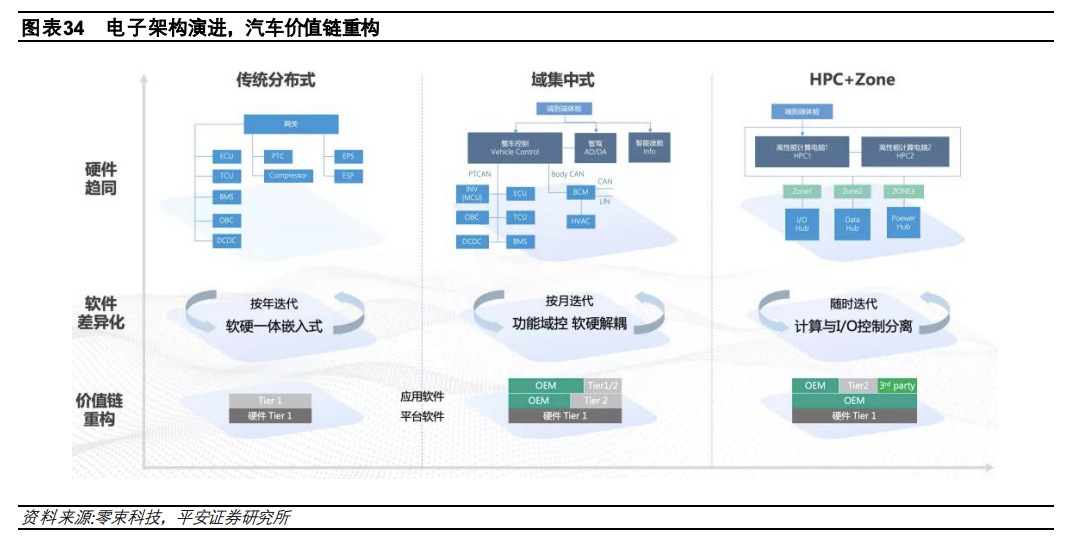
汽車(chē)電子電氣架構(gòu)的升級(jí)主要體現(xiàn)在硬件架構(gòu)、軟件架構(gòu)、通信架構(gòu)三方面:硬件架構(gòu)從分布式向域控制/中央集中式方向發(fā)展、軟件架構(gòu)從軟硬件高度耦合向分層解耦方向發(fā)展、通信架構(gòu)由LIN/CAN 總線向以太網(wǎng)方向發(fā)展。
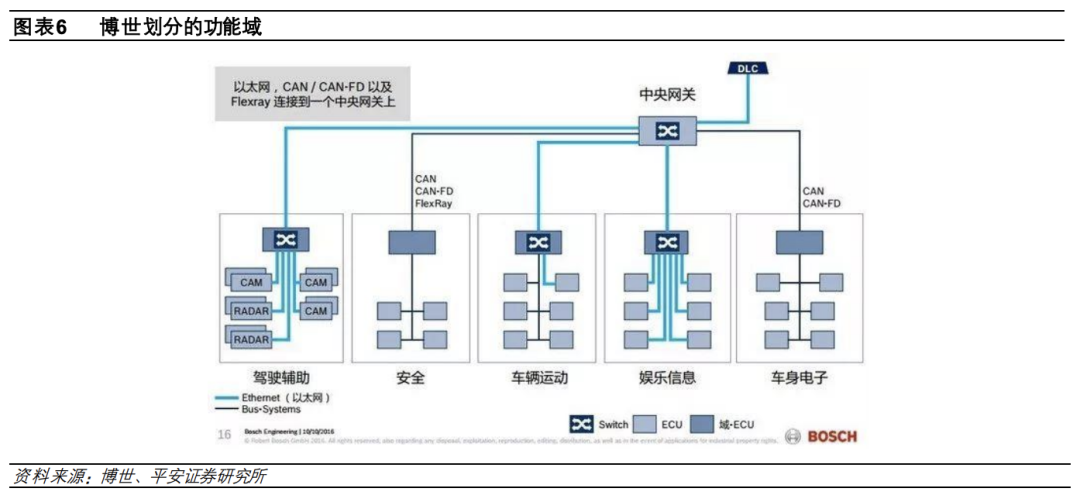
博世給出的電子電氣架構(gòu)路線圖分為六個(gè)階段,已成行業(yè)共識(shí):分布式階段(包括模塊化、集成化)——域集中式(包括集中化、域融合)、中央集中式(包括車(chē)載電腦、車(chē)云計(jì)算)。
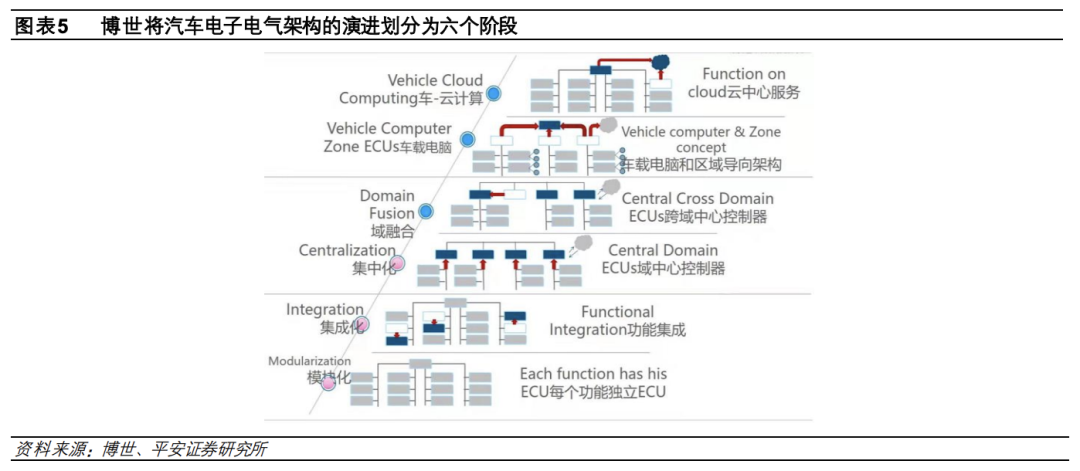
模塊化階段。1)一個(gè) ECU 負(fù)責(zé)特定的功能,比如車(chē)上的燈光對(duì)應(yīng)有一個(gè)控制器,門(mén)對(duì)應(yīng)有一個(gè)控制器,無(wú)鑰匙系統(tǒng)對(duì)應(yīng)有一個(gè)控制器。隨著汽車(chē)功能增多這種架構(gòu)日益復(fù)雜無(wú)法持續(xù)。2)集成化階段,單個(gè) ECU 負(fù)責(zé)多個(gè)功能,ECU數(shù)量較上一階段減少。在這兩個(gè)階段,汽車(chē)電子電氣架構(gòu)仍處于分布式階段,ECU 功能集成度較低。
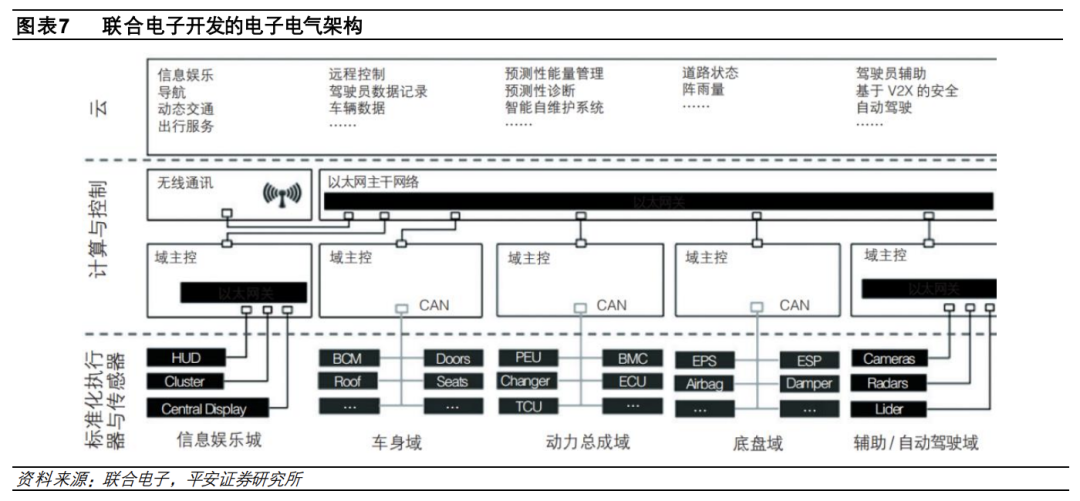
功能域控階段。功能域即根據(jù)功能劃分的域控制器,最常見(jiàn)的是如博世劃分的五個(gè)功能域(動(dòng)力域、底盤(pán)域、車(chē)身域、座艙域、自動(dòng)駕駛域)。域控制器間通過(guò)以太網(wǎng)和 CANFD(CAN with Flexible Data-Rate)相連,其中座艙域和自動(dòng)駕駛域由于要處理大量數(shù)據(jù),算力需求逐步增長(zhǎng)。動(dòng)力總成域、底盤(pán)域、車(chē)身域主要涉及控制指令計(jì)算及通訊資源,算力要求較低。
跨域融合階段。在功能域基礎(chǔ)上,為進(jìn)一步降低成本和增強(qiáng)協(xié)同,出現(xiàn)了跨域融合,即將多個(gè)域融合到一起,由跨域控制單元進(jìn)行控制。比如將動(dòng)力域、底盤(pán)域、車(chē)身域合并為整車(chē)控制域,從而將五個(gè)功能域(自動(dòng)駕駛域、動(dòng)力域、底盤(pán)域、座艙域、車(chē)身域)過(guò)渡到三個(gè)功能域(自動(dòng)駕駛域、智能座艙域、車(chē)控域)。
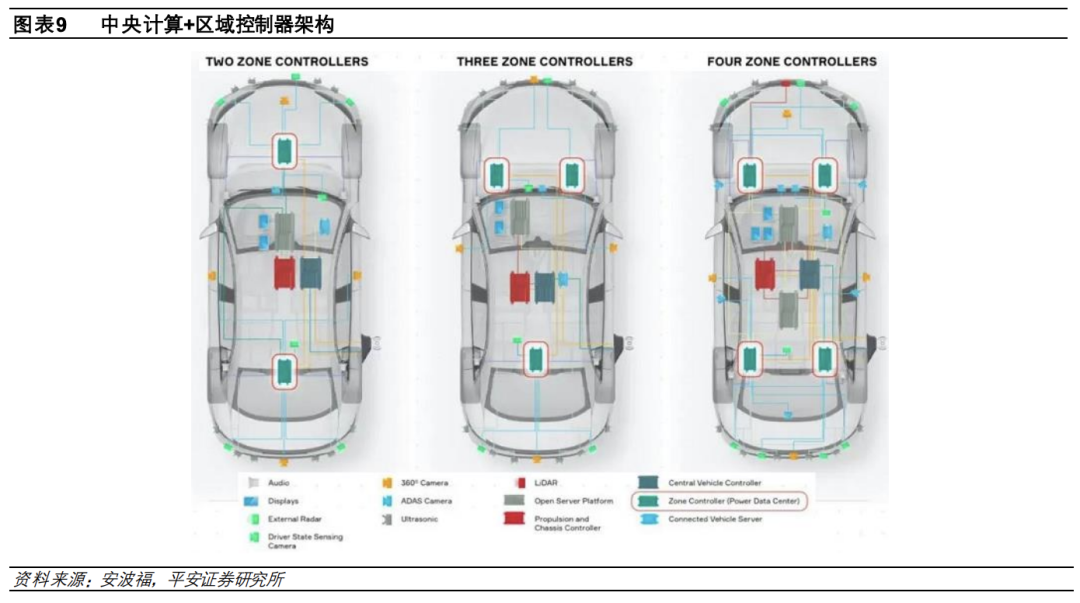
中央計(jì)算+位置域階段。隨著功能域的深度融合,功能域逐步升級(jí)為更加通用的計(jì)算平臺(tái),從功能域跨入位置域(如中域、左域、右域)。區(qū)域控制器平臺(tái)(Zonal Control Unit,ZCU)是整車(chē)計(jì)算系統(tǒng)中某個(gè)局部的感知、數(shù)據(jù)處理、控制與執(zhí)行單元。它負(fù)責(zé)連接車(chē)上某一個(gè)區(qū)域內(nèi)的傳感器、執(zhí)行器以及 ECU等,并負(fù)責(zé)該位置域內(nèi)的傳感器數(shù)據(jù)的初步計(jì)算和處理,還負(fù)責(zé)本區(qū)域內(nèi)的網(wǎng)絡(luò)協(xié)議轉(zhuǎn)換。位置域?qū)崿F(xiàn)就近布置線束,降低成本,減少通信接口,更易于實(shí)現(xiàn)線束的自動(dòng)化組裝從而提高效率。傳感器、執(zhí)行器等就近接入到附近的區(qū)域控制器中,能更好實(shí)現(xiàn)硬件擴(kuò)展,區(qū)域控制器的結(jié)構(gòu)管理更容易。區(qū)域接入+中央計(jì)算保證了整車(chē)架構(gòu)的穩(wěn)定性和功能的擴(kuò)展性,新增的外部部件可以基于區(qū)域網(wǎng)關(guān)接入,硬件的可插拔設(shè)計(jì)支持算力不斷提升,充足的算力支持應(yīng)用軟件在中央計(jì)算平臺(tái)迭代升級(jí)。
在一項(xiàng)針對(duì)某家整車(chē)制造商的研究中,安波福發(fā)現(xiàn),使用區(qū)域控制器可以整合 9個(gè) ECU,并少用數(shù)百根單獨(dú)電線,從而使車(chē)輛的重量減少了 8.5千克。減重有助于節(jié)能,并延長(zhǎng)電動(dòng)汽車(chē)的續(xù)駛里程。此外,由于區(qū)域控制器將車(chē)輛的基本電氣結(jié)構(gòu)劃分為更易于管理的組成部分,更容易實(shí)現(xiàn)自動(dòng)化線束組裝。
汽車(chē)云計(jì)算階段。將汽車(chē)部分功能轉(zhuǎn)移至云端,車(chē)內(nèi)架構(gòu)進(jìn)一步簡(jiǎn)化。車(chē)的各種傳感器和執(zhí)行器可被軟件定義和控制,汽車(chē)的零部件逐步變成標(biāo)準(zhǔn)件,徹底實(shí)現(xiàn)軟件定義汽車(chē)功能。
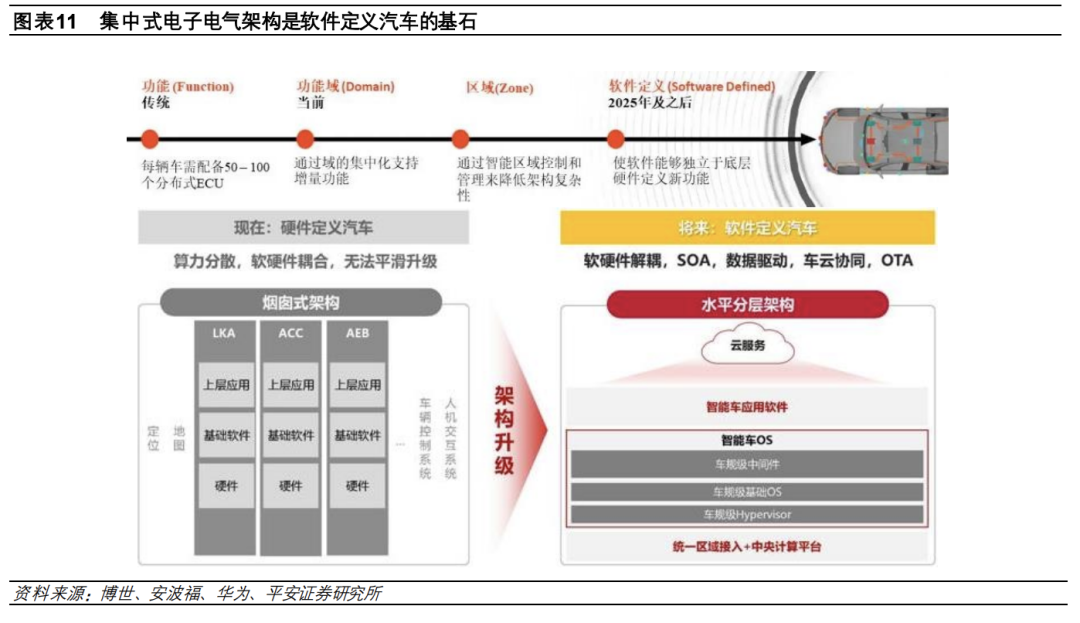
汽車(chē)電子電氣架構(gòu)的演進(jìn)為軟硬件解耦提供了有力支撐,高度中心化的電子電氣架構(gòu)帶來(lái)計(jì)算集中化、軟硬件解耦、平臺(tái)標(biāo)準(zhǔn)化、功能定制化。
1)算力趨向于集中,眾多的 ECU集中到幾個(gè)強(qiáng)大的算力平臺(tái),為軟件運(yùn)行提供了算力基礎(chǔ);
2)底層軟件和代碼開(kāi)始打通,操作系統(tǒng)為核心的軟件生態(tài)開(kāi)始建立,軟件可以實(shí)現(xiàn)持續(xù)迭代,OTA 發(fā)展提速;
3)域控制器+時(shí)間敏感以太網(wǎng)可以實(shí)現(xiàn)數(shù)據(jù)的高速處理和傳輸,為軟件應(yīng)用的發(fā)展創(chuàng)造了條件。
02 各主機(jī)廠的電子電氣架構(gòu)進(jìn)度對(duì)比
未來(lái)汽車(chē)產(chǎn)品最核心的技術(shù)是電子電氣架構(gòu),汽車(chē)電子電氣架構(gòu)由分散式、嵌入式逐漸向集中式、集成式的方向發(fā)展,最終的理想狀態(tài)應(yīng)該是形成一個(gè)汽車(chē)中央大腦(one brain),統(tǒng)一管理各種功能。
電子電氣架構(gòu)類似于“中央政府”,可對(duì)汽車(chē)的各種功能進(jìn)行統(tǒng)籌管理,避免“諸侯割據(jù)、政令不一”。
開(kāi)始的時(shí)候這個(gè)“中央政府”可能會(huì)管得少一些,“地方諸侯”還依然保有一定控制權(quán),但之后“中央政府”一定會(huì)管得越來(lái)越多,最終地方行政機(jī)構(gòu)只接收“中央政府”指令并予以高效執(zhí)行,以確保車(chē)輛整體表現(xiàn)最優(yōu)。
由于過(guò)去汽車(chē)上控制器相互獨(dú)立,軟件為嵌入式,整車(chē)做最終硬件集成即可。未來(lái)隨著 ECU 的減負(fù),原先高度分散的功能集成至域控制器,主機(jī)廠必須自己掌握中央控制系統(tǒng),否則就會(huì)失去對(duì)汽車(chē)產(chǎn)品的控制權(quán)。而把原本高度分散的控制功能逐步整合統(tǒng)一起來(lái)是傳統(tǒng)車(chē)企的全新必修課,因此車(chē)企對(duì)電子電氣架構(gòu)的掌握是分步的、漸進(jìn)式的。
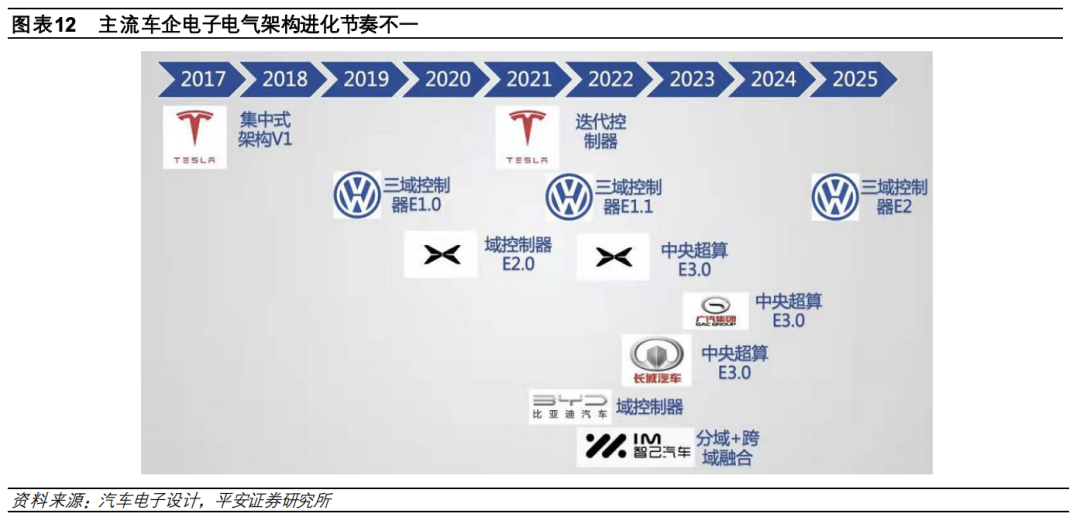
特斯拉 Model3 開(kāi)啟了電子電氣架構(gòu)大變革,出現(xiàn)中央計(jì)算雛形+位置域,縮短 50%整車(chē)線束,未來(lái)目標(biāo)是將整車(chē)線束降至100 米,在電子架構(gòu)方面,特斯拉領(lǐng)先傳統(tǒng)車(chē)企 6年以上。
除特斯拉以外,目前大部分的車(chē)企的電子電氣架構(gòu)仍處于早期的功能域控制器階段,即部分功能集中到了功能域控制器,但還有保留較多分布式模塊,即“分布式 ECU+域控制器”的過(guò)渡方案,避免因?yàn)樽兏锍潭忍髮?dǎo)致額外的風(fēng)險(xiǎn)及成本。
大部分企業(yè)規(guī)劃的下一代跨域融合電子電氣架構(gòu)將于 2022 年量產(chǎn),以實(shí)現(xiàn)軟件高度集中于域控制器,逐步減少分布式 ECU。
到 2025 年部分車(chē)企落地中央計(jì)算+區(qū)域控制器的電子電氣架構(gòu),從而實(shí)現(xiàn)軟硬件的進(jìn)一步集成,軟件所有權(quán)逐步收歸主機(jī)廠。
朝著“中央計(jì)算+區(qū)域控制”的架構(gòu)演進(jìn)的過(guò)程可能長(zhǎng)達(dá) 5-10 年。
2.1 奧迪 A8 小試牛刀
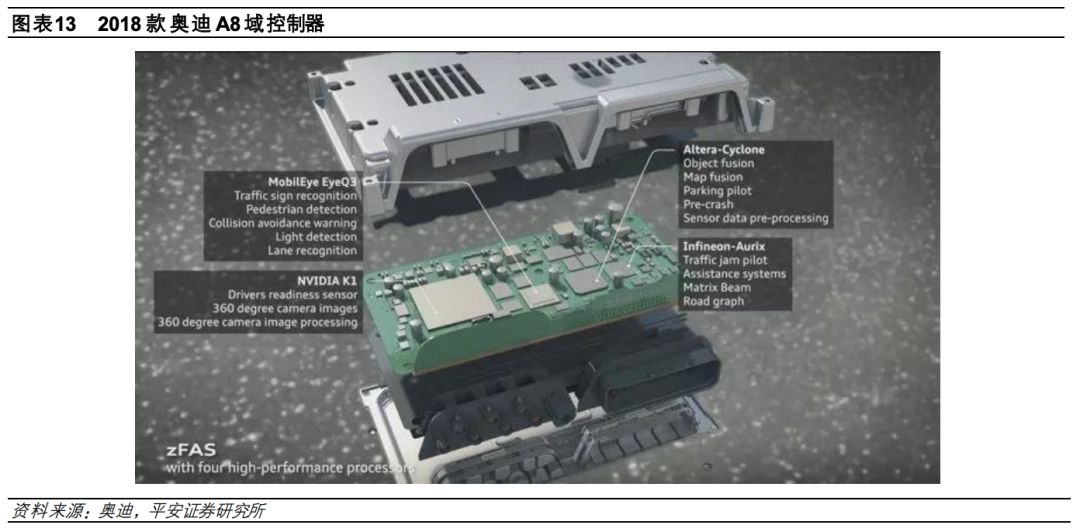
2018 年推出的奧迪 A8 率先實(shí)現(xiàn)了輔助駕駛功能的集成式控制,取代了 ECU 相互分離的分布式的輔助駕駛系統(tǒng)。
除自動(dòng)駕駛域集成外,其余底盤(pán)+安全、動(dòng)力、車(chē)身、娛樂(lè)四大域仍然采用分布式架構(gòu)。
其自動(dòng)駕駛域控制器由 4 塊芯片組成,Mobileye EyeQ3 負(fù)責(zé)視覺(jué)感知計(jì)算,如交通信號(hào)識(shí)別、行人監(jiān)測(cè)、碰撞報(bào)警,車(chē)道線識(shí)別、光線探測(cè)。
英偉達(dá) K1 負(fù)責(zé)圖像融合計(jì)算,如駕駛員監(jiān)測(cè)、360 全景攝像頭的圖像處理。
英特爾 Cyclone V 負(fù)責(zé)目標(biāo)融合、地圖融合、停車(chē)輔助、預(yù)剎車(chē)燈。英飛凌的 Aurix TC297 負(fù)責(zé)通信處理。
這個(gè)自動(dòng)駕駛域控制器軟件開(kāi)發(fā)由奧地利軟件公司 TTTech 完成,德?tīng)柛L峁┯布伞?/p>
2.2 特斯拉 Model3 開(kāi)啟電子電氣架構(gòu)的全面變革
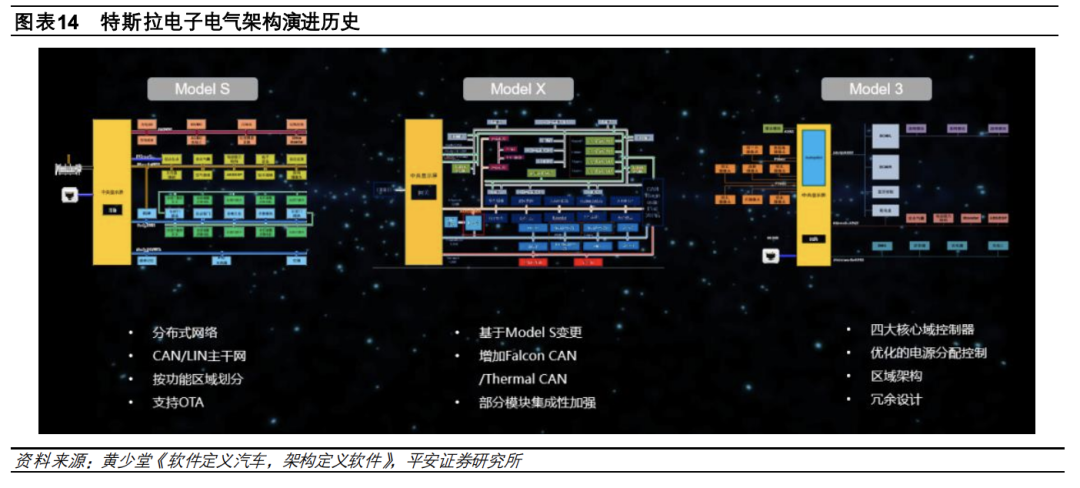
特斯拉是汽車(chē)電子電氣架構(gòu)的全面變革者,2012 年 Model S 有較為明顯的功能域劃分,包括動(dòng)力域、底盤(pán)域、車(chē)身域,ADAS 模塊橫跨了動(dòng)力和底盤(pán)域,由于傳統(tǒng)域架構(gòu)無(wú)法滿足自動(dòng)駕駛技術(shù)的發(fā)展和軟件定義汽車(chē)的需求,為解耦軟硬件,搭載算力更強(qiáng)大的主控芯片,必須先進(jìn)行電子電氣架構(gòu)的變革,因此 2017 年特斯拉推出的 Model3 突破了功能域的框架,實(shí)現(xiàn)了中央計(jì)算+區(qū)域控制器框架,通過(guò)搭建異域融合架構(gòu)+自主軟件平臺(tái),不僅實(shí)現(xiàn)軟件定義汽車(chē),還有效降低整車(chē)成本,提高效率:
1)Model 3整車(chē)三個(gè)控制器,有效降低物料成本;
2)硬件集成為軟件,為汽車(chē)深度的控制和維護(hù)提供基礎(chǔ);
3)自主軟件平臺(tái)通過(guò)模塊化支持?jǐn)U展復(fù)用。
特斯拉 Model3 基本實(shí)現(xiàn)了中央集中式架構(gòu)的雛形,不過(guò) Model3 距離真正的中央集中式架構(gòu)還有相當(dāng)距離:通訊架構(gòu)以 CAN總線為主,中央計(jì)算模塊只是形式上將影音娛樂(lè) MCU、自動(dòng)駕駛 FSD 以及車(chē)內(nèi)外聯(lián)網(wǎng)模塊集成在一塊板子上,且各模塊獨(dú)立運(yùn)行各自的操作系統(tǒng)。但無(wú)論如何,Model3 已經(jīng)踐行了中央計(jì)算+區(qū)域控制的電子電氣架構(gòu)理念框架,領(lǐng)先傳統(tǒng)車(chē)企 6 年左右。
特斯拉三代車(chē)的電子電氣架構(gòu)演進(jìn)背后的實(shí)質(zhì)是不斷把車(chē)輛功能從供應(yīng)商手中拿回來(lái)自主開(kāi)發(fā)的過(guò)程。
Model3 的自動(dòng)駕駛模塊、娛樂(lè)控制模塊、其它區(qū)域控制器、熱管理均為自主設(shè)計(jì)開(kāi)發(fā),實(shí)現(xiàn)了整車(chē)主要模塊自主,不依賴 Tier1,即使沒(méi)有實(shí)現(xiàn)自主的模塊,特斯拉也與供應(yīng)商進(jìn)行了聯(lián)合開(kāi)發(fā),比如特斯拉將自己的軟件加入到了博世為其提供的 ibooster 里,通過(guò)軟件更新實(shí)現(xiàn)剎車(chē)距離變短。
通過(guò)三款車(chē)型的演進(jìn),特斯拉的新型電子電氣架構(gòu)不僅實(shí)現(xiàn)了 ECU數(shù)量的大幅減少、線束大幅縮短(MODEL S 線束 3000米,Model 3 減少一半以上),更打破了汽車(chē)產(chǎn)業(yè)舊有的零部件供應(yīng)體系(即軟硬件深度耦合打包出售給主機(jī)廠,主機(jī)廠議價(jià)能力差,后續(xù)功能調(diào)整困難),真正實(shí)現(xiàn)了軟件定義汽車(chē),特斯拉的 OTA 可以改變制動(dòng)距離、開(kāi)通座椅加熱,提供個(gè)性化的用戶體驗(yàn),由于突破了功能域,特斯拉的域控制器橫跨車(chē)身、座艙、底盤(pán)及動(dòng)力域,這使得車(chē)輛的功能迭代更為靈活,用戶可以體驗(yàn)到車(chē)是常用常新的,與之形成鮮明對(duì)比的是,大部分傳統(tǒng)車(chē)廠的 OTA 僅限于車(chē)載信息娛樂(lè)等功能。
特斯拉為了更好地發(fā)揮軟件的作用,實(shí)現(xiàn)了自動(dòng)駕駛主控芯片這一最為核心的智能硬件的自研自制(特斯拉認(rèn)為芯片的專用設(shè)計(jì)使得其上的軟件運(yùn)行更高效),這意味著后續(xù)特斯拉車(chē)輛的升級(jí)速度、功能的部署都不再依賴外部 SOC 芯片供應(yīng)商,真正將車(chē)輛的靈魂掌握在自己手中。
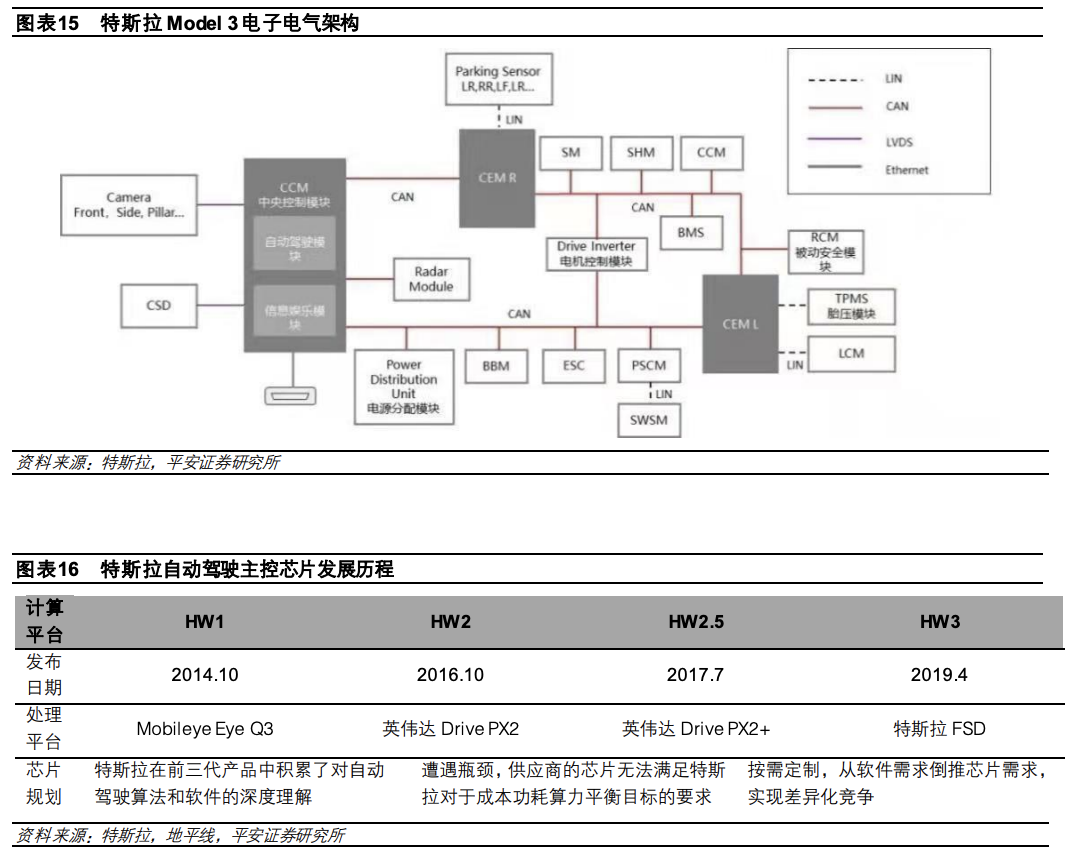
Model 3整車(chē)四個(gè)控制器包括中央計(jì)算模塊(CCM)、左車(chē)身控制模塊(BCM LH)、右車(chē)身控制模塊(BCM RH)和前車(chē)身控制模塊(BCM FH)四大域控制器。
左車(chē)身控制模塊負(fù)責(zé)左車(chē)身便利性控制以及轉(zhuǎn)向、制動(dòng)、助力等。
右車(chē)身控制模塊負(fù)責(zé)右車(chē)身便利性控制、底盤(pán)安全系統(tǒng)、動(dòng)力系統(tǒng)、熱管理等。
中央計(jì)算模塊包括自動(dòng)駕駛模塊、信息娛樂(lè)模塊、車(chē)內(nèi)外通信連接,共用一套液冷系統(tǒng)。
自動(dòng)駕駛及娛樂(lè)控制模塊接管與輔助駕駛有關(guān)的傳感器——攝像頭、毫米波雷達(dá),將對(duì)算力需求較高的智能駕駛、信息娛樂(lè)放在一起,便于智能硬件持續(xù)升級(jí),2019 年特斯拉推出自研 FSD 芯片替換了基于英偉達(dá) Drive PX2 芯片組,AI 計(jì)算性能提升達(dá) 21 倍,隨著特斯拉將自動(dòng)駕駛最核心的計(jì)算硬件實(shí)現(xiàn)自研,特斯拉大幅提升了相對(duì)于競(jìng)爭(zhēng)對(duì)手的領(lǐng)先優(yōu)勢(shì)。
操作系統(tǒng)基于開(kāi)源 Linux進(jìn)行定制化裁剪,并自研中間件,軟硬件均實(shí)現(xiàn)了自主可控,車(chē)型功能迭代更新速度加快,整車(chē)開(kāi)發(fā)成本降低。
2.3 大眾 ID 系列電子電氣架構(gòu)
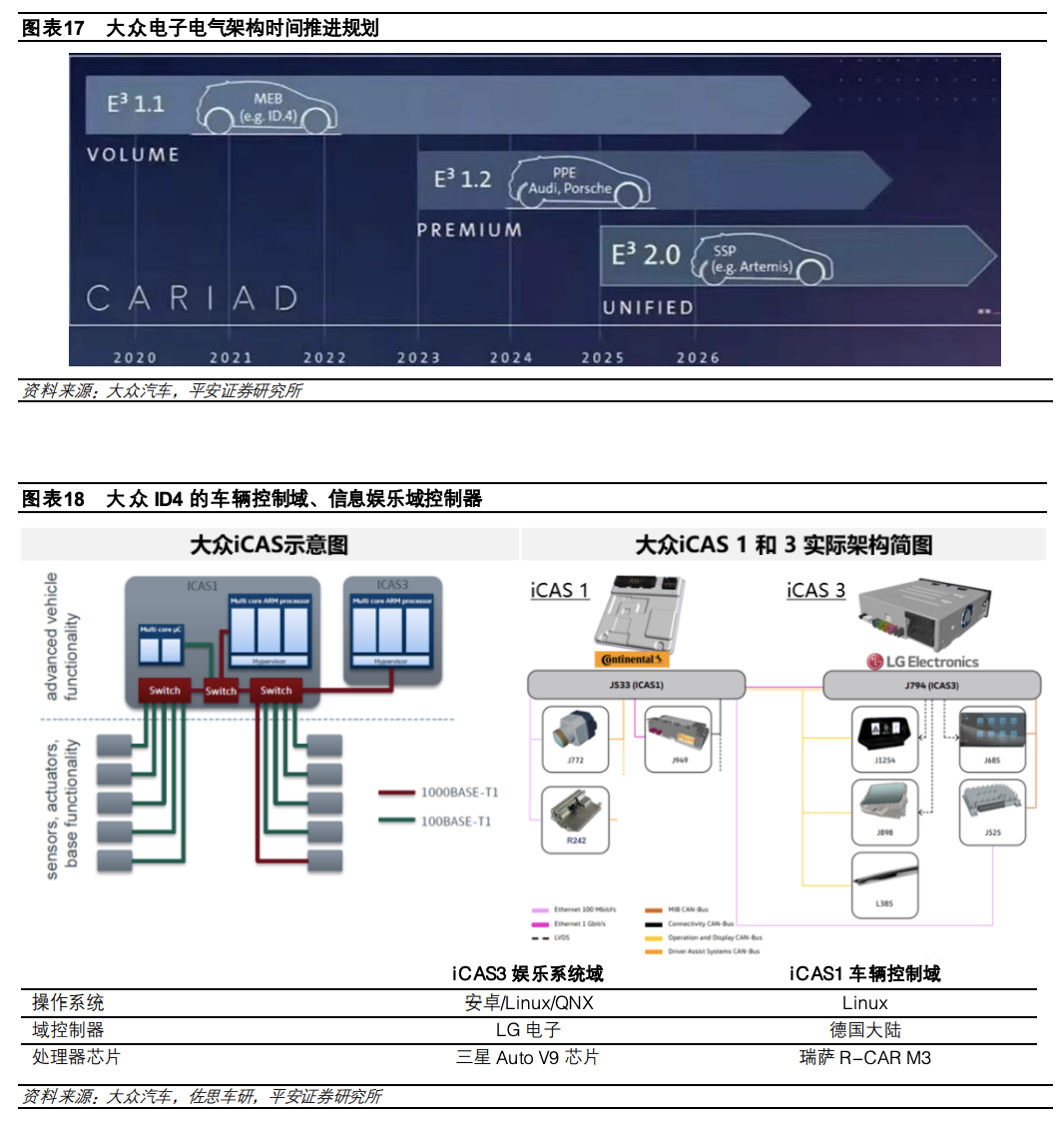
大眾汽車(chē)已經(jīng)從 MQB 平臺(tái)車(chē)型的分布式電子電氣架構(gòu)升級(jí)為 MEB 平臺(tái) ID 系列車(chē)型上采用的三個(gè)功能域的電子電氣架構(gòu)。
按規(guī)劃,基于大眾 MEB 平臺(tái)的 ID系列電子電氣架構(gòu)為 E31.1版,2023年在 PPE 平臺(tái)搭載 E31.2版,到 2025年后才進(jìn)化到 E32.0 版。
大眾的 E3 架構(gòu)主要由車(chē)輛控制域(ICAS1)、智能駕駛域(ICAS2)和智能座艙域(ICAS3)組成,其中智能駕駛域 ICAS2尚未開(kāi)發(fā)完成,量產(chǎn)車(chē)型上搭載的依然是分布式架構(gòu)方案,大眾 ID 系列的電子電氣架構(gòu)雖然有三個(gè)功能域,但同時(shí)依然保留了較多分布式模塊,大眾 ID4 有 52 個(gè) ECU,兩倍于特斯拉 Model Y ECU數(shù)量。
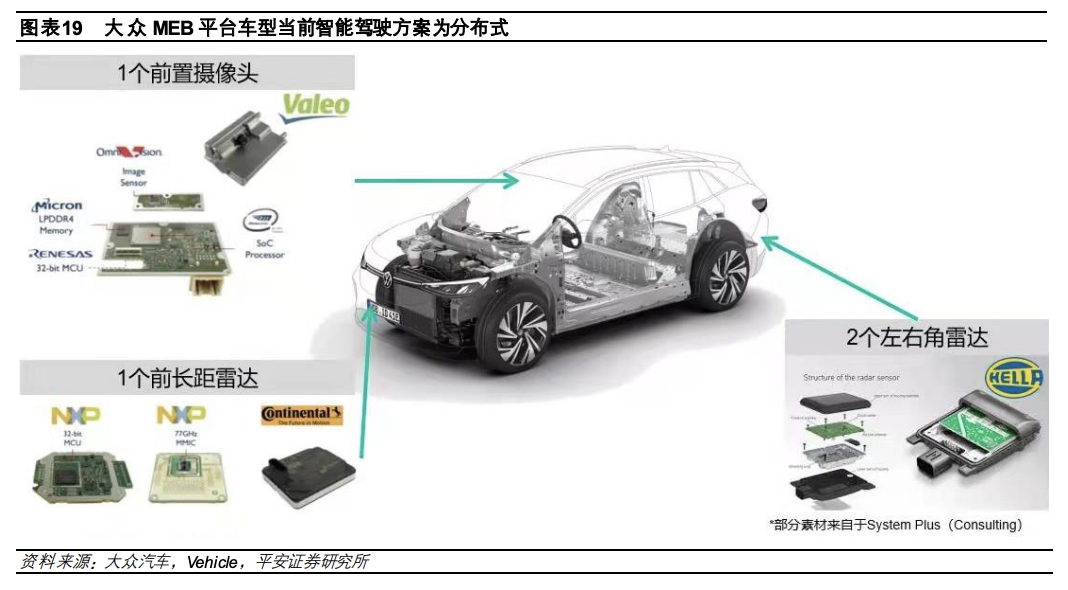
國(guó)產(chǎn) ID4 輔助駕駛功能由 Mobileye 單目攝像頭+前長(zhǎng)距雷達(dá)+兩個(gè)后角雷達(dá)實(shí)現(xiàn),作為平價(jià)電動(dòng)車(chē),在自動(dòng)駕駛域控制器這塊暫時(shí)沒(méi)有選擇跟特斯拉和中國(guó)新勢(shì)力去PK。
大眾 ID 系列車(chē)型 2021 年完成 7 萬(wàn)臺(tái)交付量,低于前期規(guī)劃。
中國(guó)作為大眾最重要的單一市場(chǎng),智能化這塊也正在加速追趕,2022 年大眾軟件公司 CARIAD 在中國(guó)成立子公司,據(jù)其中國(guó)子公司首席執(zhí)行官介紹,該公司的核心業(yè)務(wù)是針對(duì) MEB平臺(tái)進(jìn)行軟件研發(fā),2022 年下半年啟動(dòng) OTA 功能,第二是針對(duì)高端平臺(tái)(PPE 在華首款車(chē) 2024 年投產(chǎn))做中國(guó)本土化、數(shù)字化產(chǎn)品,包括高級(jí)駕駛輔助系統(tǒng),其智能網(wǎng)聯(lián)系統(tǒng)也要與中國(guó)的基礎(chǔ)設(shè)施建設(shè)相結(jié)合;第三是圍繞 2025 年后 SSP 平臺(tái)做軟件研發(fā)。
結(jié)合大眾汽車(chē) 2030 NEW auto 的規(guī)劃,軟件自研比例要上升到 60%,軟件研發(fā)保持自主的好處是實(shí)現(xiàn)敏捷(包括開(kāi)發(fā)和維護(hù))和體現(xiàn)產(chǎn)品差異化,其中本地化也是外資在中國(guó)提升智能化的必要且關(guān)鍵的一環(huán),最終目的是打造吸引中國(guó)用戶的有競(jìng)爭(zhēng)力的產(chǎn)品。
我們看一下幾款同一時(shí)間面世的三款電動(dòng)車(chē)的電子電氣架構(gòu)的對(duì)比,雖然大眾 ID 系列也號(hào)稱是用三個(gè)域控制器代替過(guò)去 70+ 分布式 ECU,但實(shí)際上依然保有較多 ECU 數(shù)量,ID3 之前由于出現(xiàn)大面積的軟件 BUG 而遲遲未按期交付,這也反映出傳統(tǒng)車(chē)廠即使選擇進(jìn)行電子電氣架構(gòu)大變革,但若自身人才結(jié)構(gòu)及軟件實(shí)力尚不足夠,就依然會(huì)嚴(yán)重依賴外部供應(yīng)商,造成步子邁得太大帶來(lái)額外風(fēng)險(xiǎn)。
所以大部分主機(jī)廠選擇的做法是走漸進(jìn)式路線,隨著自身軟件實(shí)力提升逐步收歸軟件主導(dǎo)權(quán)。
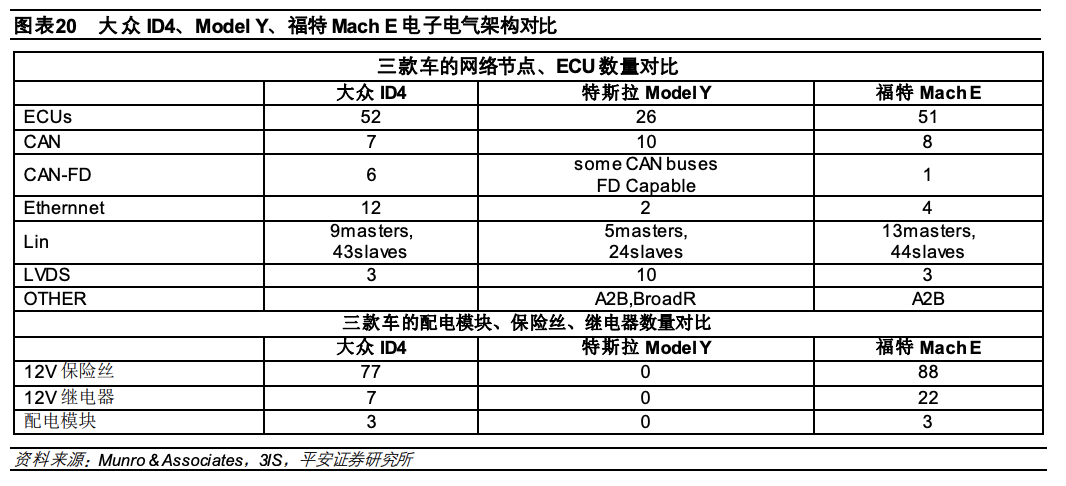
2021 年 Munro & Associates 工程公司比較了特斯拉 Model Y、福特 Mach-E 和大眾 ID.4 電氣架構(gòu)之間的差異。
涉及三款電動(dòng)車(chē)內(nèi) ECU 的數(shù)量、CAN 總線的數(shù)量、以太網(wǎng)的使用、LIN 總線、LVDS(Low-Voltage Differential Signaling,低電壓差分信號(hào))通道的使用、音頻、保險(xiǎn)絲和繼電器的使用等方面。
特斯拉 Model Y 集成度明顯更高,其 ECU 數(shù)量是 ID4 的一半,福特和大眾還保留了較多的現(xiàn)成的分布式 ECU,特斯拉的 LIN(本地互連網(wǎng)絡(luò))數(shù)量也僅為大眾 ID4和福特 Mach-E 的一半。
Tesla 中 CAN(控制器局域網(wǎng))總線的數(shù)量更高,由于攝像頭數(shù)量增加,特斯拉的低壓差分信號(hào)(LVDS)使用量是福特和大眾汽車(chē)的三倍以上,大眾汽車(chē)的以太網(wǎng)的使用更多。
特斯拉從 Model 3開(kāi)始車(chē)輛的低壓電氣部分不采用任何保險(xiǎn)絲盒繼電器。
2.4 小鵬汽車(chē) G9 電子電氣架構(gòu)具領(lǐng)先性
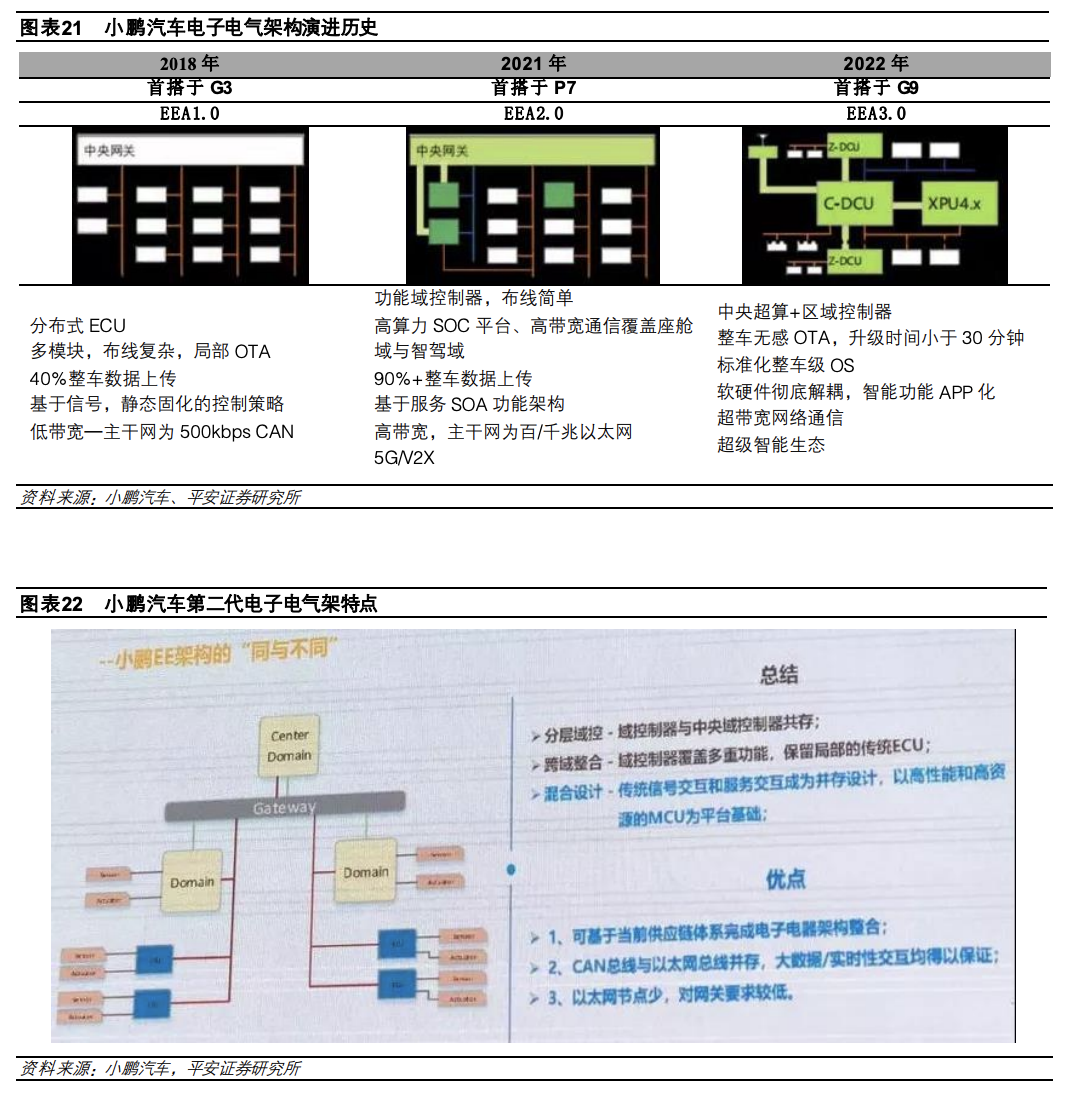
新勢(shì)力三強(qiáng)中小鵬汽車(chē)在電子電氣架構(gòu)方面走得比較領(lǐng)先,隨著車(chē)型從 G3、P7 和 P5,迭代到 G9 的這套 X-EEA3.0 電子電氣架構(gòu),已經(jīng)進(jìn)入到中央集中式電子電氣架構(gòu)。
憑借領(lǐng)先一代的架構(gòu),搭載更高算力 SOC 芯片及更高算力利用率,小鵬G9 或成首款支持 XPILOT 4.0 智能輔助駕駛系統(tǒng)的量產(chǎn)車(chē)。
小鵬 P7 搭載小鵬第二代電子電氣架構(gòu),具備混合式的特點(diǎn):
1) 分層域控。功能域控制器(智駕域控制器、車(chē)身域控制器、動(dòng)力域控制器等模塊)與中央域控制器并存;
2) 跨域整合——域控制器覆蓋多重功能,保留局部的傳統(tǒng) ECU;
3) 混合設(shè)計(jì)——傳統(tǒng)的信號(hào)交互和服務(wù)交互成為并存設(shè)計(jì)。
因此 CAN 總線和以太網(wǎng)總線并存,大數(shù)據(jù)/實(shí)時(shí)性交互均得以保證;以太網(wǎng)節(jié)點(diǎn)少,對(duì)網(wǎng)關(guān)要求低。
小鵬第二代電子電氣架構(gòu)實(shí)現(xiàn)傳統(tǒng) ECU 數(shù)量減少約 60%,硬件資源實(shí)現(xiàn)高度集成,大部分的車(chē)身功能遷移至域控制器,中央處理器可實(shí)現(xiàn)支持儀表、信息娛樂(lè)系統(tǒng)以及智能車(chē)身相關(guān)控制的大部分功能,同時(shí)集成中央網(wǎng)關(guān),兼容 V2X 的協(xié)議,支持車(chē)與車(chē)的局域網(wǎng)的通信,支持車(chē)與云端的互聯(lián),車(chē)與遠(yuǎn)程數(shù)字終端的連接功能。
小鵬汽車(chē)的智能駕駛域控制器,集成了高速 NGP、城市 GNP 及泊車(chē)功能。
小鵬輔助駕駛采用激光雷達(dá)視覺(jué)融合方案,與特斯拉的純視覺(jué)方案不同,這就導(dǎo)致兩者硬件架構(gòu)不同,對(duì)于通訊帶寬、計(jì)算能力的要求也不一樣。
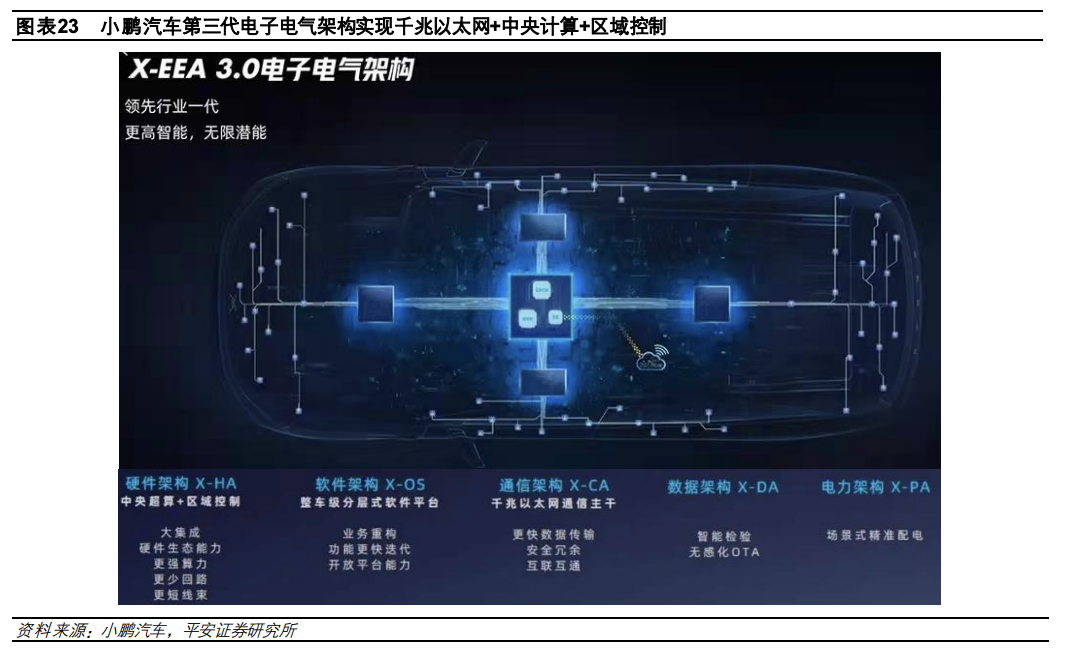
小鵬汽車(chē)將其 X-EEA3.0 電子電氣架構(gòu)稱為“讓智能汽車(chē)在未來(lái)永不落伍的秘密”。根據(jù)公司披露的首搭于 G9 的電子電氣架構(gòu)的信息,未來(lái) G9 可以升級(jí)和優(yōu)化的潛力較大。
X-EEA 3.0硬件架構(gòu)方面,采用中央超算(C-DCU)+區(qū)域控制(Z-DCU)的硬件架構(gòu),中央超算包含車(chē)控、智駕、座艙 3個(gè)域控制器,區(qū)域控制器為左右域控制器,將更多控制件分區(qū),根據(jù)就近配置的原則,分區(qū)接管相應(yīng)功能,大幅縮減線束。
得益于小鵬汽車(chē)的全棧自研能力,新架構(gòu)做到了硬件和軟件的深度集成,不僅實(shí)現(xiàn)軟硬件解耦,也實(shí)現(xiàn)軟件分層解耦,可使得系統(tǒng)軟件平臺(tái)、基礎(chǔ)軟件平臺(tái)、智能應(yīng)用平臺(tái)分層迭代,把車(chē)輛的底層軟件和基礎(chǔ)軟件與智能、科技、性能相關(guān)的應(yīng)用軟件脫離開(kāi),在開(kāi)發(fā)新功能時(shí),只需要對(duì)最上層的應(yīng)用軟件進(jìn)行研究和迭代就可以,縮短了研發(fā)周期和技術(shù)壁壘,用戶也能夠享受到車(chē)的快速迭代。
系統(tǒng)軟件平臺(tái):基于外購(gòu)代碼做部分定制開(kāi)發(fā),隨整車(chē)基礎(chǔ)軟件平臺(tái)凍結(jié)而凍結(jié),可復(fù)用于不同車(chē)型;
基礎(chǔ)軟件平臺(tái):多個(gè)整車(chē)基礎(chǔ)功能軟件均形成標(biāo)準(zhǔn)服務(wù)接口且在車(chē)輛量產(chǎn)前凍結(jié),可復(fù)用于不同車(chē)型;
智能應(yīng)用平臺(tái):如自動(dòng)駕駛、智能語(yǔ)音控制、智能場(chǎng)景等功能,可實(shí)現(xiàn)快速開(kāi)發(fā)和迭代。
X-EEA 3.0 數(shù)據(jù)架構(gòu)方面,域控制器設(shè)置內(nèi)存分區(qū),升級(jí)運(yùn)行互不干涉,便用車(chē)邊升級(jí),30分鐘可升級(jí)完成。
通信架構(gòu)方面,X-EEA3.0 在國(guó)內(nèi)首次實(shí)現(xiàn)了以千兆以太網(wǎng)為主干的通信架構(gòu),同時(shí)支持多通訊協(xié)議,讓車(chē)輛在數(shù)據(jù)傳輸方面更快速。從 G9 搭載的新一代電子電氣架構(gòu)可以看出,小鵬在骨干網(wǎng)絡(luò)的建設(shè)和面向 SOA 的方向起步較早。
X-EEA 3.0 電力架構(gòu)方面,可實(shí)現(xiàn)場(chǎng)景式精準(zhǔn)配電,可根據(jù)駕駛、第三空間等不同用車(chē)場(chǎng)景按需配電,比如在路邊等人時(shí),可以只對(duì)空調(diào)、座椅調(diào)節(jié)、音樂(lè)等功能供電,其他部分?jǐn)嚯姡@樣就能實(shí)現(xiàn)節(jié)能耗節(jié)省,提高續(xù)航里程。車(chē)輛定期自診斷,主動(dòng)發(fā)現(xiàn)問(wèn)題,引導(dǎo)維修,以科技手段賦能售后。
2.5 長(zhǎng)城汽車(chē)電子電氣架構(gòu)發(fā)展路線圖
長(zhǎng)城汽車(chē) 2020 年開(kāi)發(fā)的第三代電子電氣架構(gòu)包含 4 個(gè)功能域控制器——車(chē)身控制、動(dòng)力底盤(pán)、智能座艙、智能駕駛,應(yīng)用軟件自主研發(fā),已實(shí)現(xiàn)量產(chǎn)并應(yīng)用于長(zhǎng)城汽車(chē)全系車(chē)型,車(chē)型物料成本得以優(yōu)化,如新哈弗 H6 優(yōu)化了 300 米線束,總長(zhǎng)度1.6 公里,接近特斯拉 Model 3,減重超 2 公斤。
從 GEEP3.0開(kāi)始長(zhǎng)城汽車(chē)實(shí)現(xiàn)全部應(yīng)用層軟件自主開(kāi)發(fā)能力,四個(gè)域控制器的上層應(yīng)用軟件,甚至部分底層及底層的集成軟件亦由長(zhǎng)城汽車(chē)自主開(kāi)發(fā)。
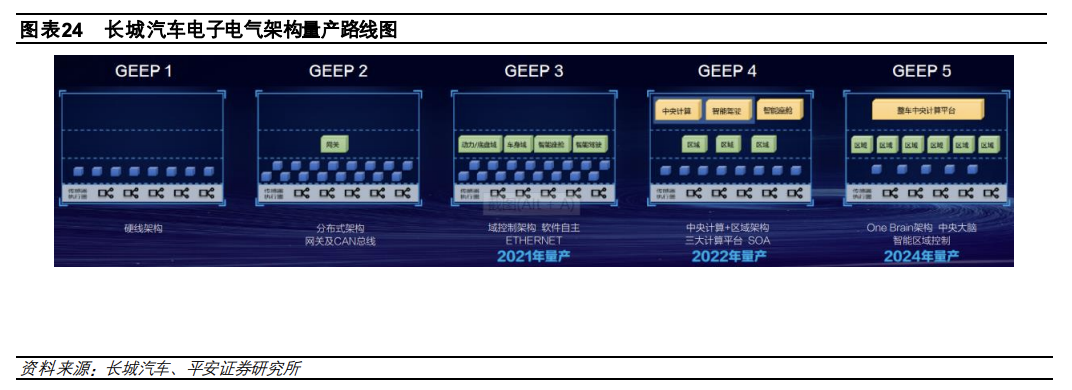
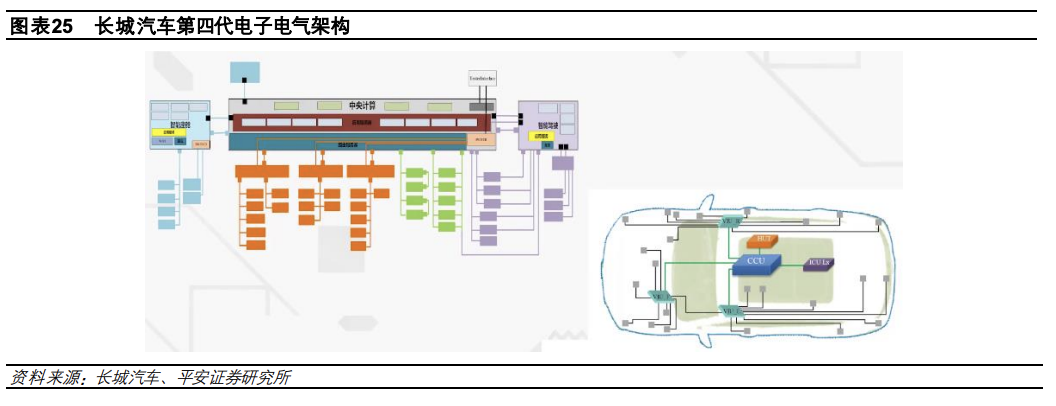
2022 年內(nèi)將推出的第四代電子電氣架構(gòu)將進(jìn)一步集中整車(chē)控制軟件,實(shí)現(xiàn)高效集成管理、高度安全可靠和更快需求響應(yīng)。第四代架構(gòu)擁有中央計(jì)算、智能座艙及高階自動(dòng)駕駛 3 個(gè)計(jì)算平臺(tái),外加 3 個(gè)區(qū)域控制器(左、右、前)。第四代架構(gòu)將率先搭載到長(zhǎng)城汽車(chē)的全新的電動(dòng)、混動(dòng)平臺(tái),并陸續(xù)擴(kuò)展到全系車(chē)型。
第四代電子電氣架構(gòu)的中央計(jì)算單元跨域整合了車(chē)身、網(wǎng)關(guān)、空調(diào)、動(dòng)力/底盤(pán)控制及 ADAS 功能,它的主控芯片算力高達(dá) 30KDMIPS,能夠高效保障系統(tǒng)的控制和響應(yīng)。
GEEP 4.0 架構(gòu)擁有成熟的視覺(jué)處理芯片解決方案,18 路 CAN FD、4 路 LIN、11 路車(chē)載以太網(wǎng),以及 64GB 存儲(chǔ)和 1GB 內(nèi)存等配置,以備未來(lái)功能融合帶來(lái)的算力和通信等需求。
3 個(gè)區(qū)域控制器為標(biāo)準(zhǔn)化的控制單元,負(fù)責(zé)整合周邊 MCU,目前三個(gè)區(qū)域控制器的大部分軟件算法已經(jīng)上移到中央計(jì)算單元中,由長(zhǎng)城軟件團(tuán)隊(duì)開(kāi)發(fā)。
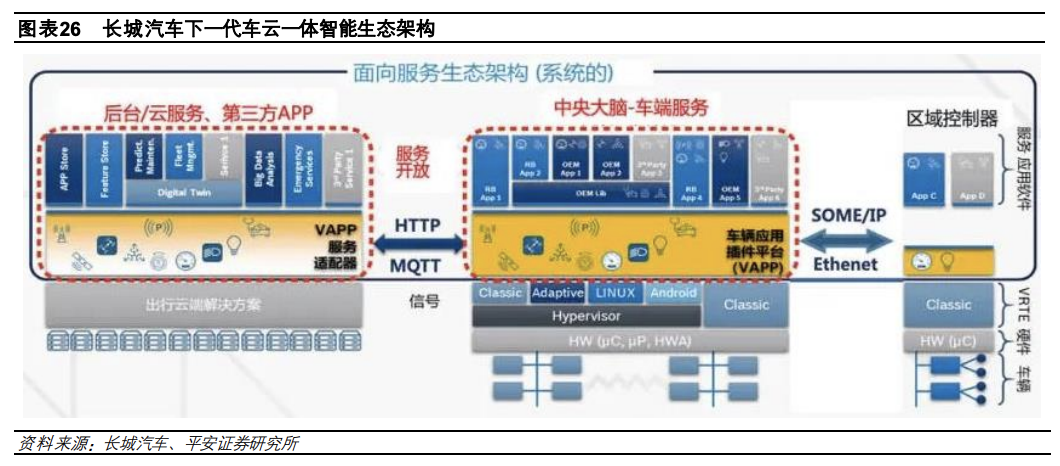
該架構(gòu)引入 SOA 設(shè)計(jì)方式及理念,打造軟件分層的基礎(chǔ)架構(gòu)平臺(tái),提供模塊化標(biāo)準(zhǔn)服務(wù)接口,優(yōu)勢(shì)是可以提供積木式拆裝組合、解耦軟硬件平臺(tái),提高軟件復(fù)用性,讓汽車(chē)實(shí)現(xiàn)全生命周期的功能迭代升級(jí),用戶可以根據(jù)需求喜好,動(dòng)態(tài)訂閱升級(jí)車(chē)輛服務(wù)功能,無(wú)需等待軟件升級(jí)批次。
同時(shí) SOA 化還能靈活部署智能化場(chǎng)景,標(biāo)準(zhǔn)化接口可實(shí)現(xiàn)開(kāi)放服務(wù),構(gòu)建長(zhǎng)城汽車(chē)眾創(chuàng)生態(tài),聯(lián)合開(kāi)發(fā)者為用戶提供全場(chǎng)景智慧出行服務(wù)。
GEEP 4.0 支持固件空中升級(jí),軟件空中升級(jí)、遠(yuǎn)程診斷;同時(shí)支持整車(chē)所有 ECU OTA 功能,包含動(dòng)力底盤(pán)系統(tǒng)、影音娛樂(lè)系統(tǒng)、車(chē)身系統(tǒng)、智能駕駛系統(tǒng)等。
基于全新架構(gòu)的云診斷方式為售后服務(wù)帶來(lái)便利,基于車(chē)端、云端功能的部署,實(shí)現(xiàn)遠(yuǎn)程對(duì)車(chē)輛故障信息診斷,可以遠(yuǎn)程對(duì)車(chē)輛進(jìn)行維修。
在保證診斷和維修時(shí)效性同時(shí),通過(guò)診斷知識(shí)庫(kù)可以智能化地識(shí)別、分析,并匹配最優(yōu)的維修方案,有效解決 4S 店人員不足、技術(shù)受限的短板,真正做到快速為用戶排憂解難。
長(zhǎng)城汽車(chē)第五代電子電氣架構(gòu)研發(fā)與第四代同步啟動(dòng),第五代架構(gòu)將整車(chē)軟件高度集中在一個(gè)中央大腦(one brain),計(jì)劃 2024 年面世。
將實(shí)現(xiàn) 100% SOA 化,完成整車(chē)標(biāo)準(zhǔn)化軟件平臺(tái)的搭建。特斯拉目前所用的中央計(jì)算模塊座艙芯片和智駕芯片是分離的,還不是 one brain 方案,從目前全球頭部智能芯片廠家的趨勢(shì)看,智駕芯片和座艙芯片融合為一片是大勢(shì)所趨,但 one brain 方案對(duì)主機(jī)廠的軟件能力要求很高。
長(zhǎng)城汽車(chē)的電子電氣架構(gòu)迭代速度快,將為自研智能化核心技術(shù)落地提供“地基”。電子電氣架構(gòu)快速迭代也與公司致力于在智能化方面保持領(lǐng)先地位這一目標(biāo)強(qiáng)相關(guān)。
智能化方面,長(zhǎng)城的典型致勝利器有:
1)毫末智行的自動(dòng)駕駛?cè)珬W匝屑夹g(shù)。
2)2023年投入商業(yè)應(yīng)用的線控轉(zhuǎn)向技術(shù)。
自動(dòng)駕駛解決方案全棧自研方面:長(zhǎng)城汽車(chē)旗下的毫末智行將于 2022 年內(nèi)實(shí)現(xiàn)城市領(lǐng)航輔助駕駛功能,或與小鵬汽車(chē)比拼城市領(lǐng)航功能落地節(jié)奏。
硬件方面,HPilot3.0 擁有 360TOPS 的強(qiáng)勁算力,全車(chē)配備 12 個(gè)攝像頭和 2 個(gè)激光雷達(dá),5 個(gè)毫米波雷達(dá),12 個(gè)超聲波雷達(dá)。
毫末智行城市領(lǐng)航功能率先落地的原因之一是采用重感知的方案,而不是重地圖的方案,不受城市高精地圖限制。
毫末智行城市領(lǐng)航計(jì)劃 2022 年 6 月份 SOP,并可做到全國(guó) 100 多個(gè)城市有效的部署,在地理范圍上具有很大優(yōu)勢(shì)。
毫末智行整體部署范圍大、車(chē)型多、數(shù)量多,可基于更多的數(shù)據(jù)保持高速的持續(xù)迭代。
2022 年承擔(dān)長(zhǎng)城汽車(chē) 34 款待上市車(chē)型高級(jí)別輔助駕駛開(kāi)發(fā)任務(wù),占長(zhǎng)城汽車(chē)全年待上市車(chē)型接近 80%,這些車(chē)型中 30% 是標(biāo)配,其余均是高配搭載。
自動(dòng)駕駛執(zhí)行端方面:汽車(chē)智能化升級(jí)和電子電氣架構(gòu)的集中化,同時(shí)還需要對(duì)傳統(tǒng)汽車(chē)底盤(pán)進(jìn)行線控升級(jí)來(lái)適配發(fā)展,底盤(pán)控制系統(tǒng)與自動(dòng)駕駛的執(zhí)行環(huán)節(jié)強(qiáng)相關(guān)。
線控底盤(pán)主要為線控轉(zhuǎn)向、線控制動(dòng)、線控?fù)Q擋、線控油門(mén)、線控懸掛,其中線控轉(zhuǎn)向和線控制動(dòng)是面向自動(dòng)駕駛執(zhí)行端最核心的產(chǎn)品,當(dāng)前全球主要的線控制動(dòng)廠家是博世、大陸、采埃孚等傳統(tǒng) Tier1,進(jìn)入門(mén)檻很高。
2021 年中長(zhǎng)城汽車(chē)首次發(fā)布智慧線控底盤(pán),從電子機(jī)械線控制動(dòng)、轉(zhuǎn)向器、電機(jī)、模擬器、控制器等核心硬件到包括整個(gè)軟件系統(tǒng)全都由長(zhǎng)城汽車(chē)自主設(shè)計(jì)完成。這是全國(guó)首個(gè)支持 L4+ 自動(dòng)駕駛的線控轉(zhuǎn)向技術(shù),將于 2023 年正式投入商業(yè)應(yīng)用。
2.6 上汽零束電子電氣架構(gòu)
上汽總工程師祖似杰認(rèn)為,汽車(chē)產(chǎn)品最核心的技術(shù)是電子電氣架構(gòu),且一定要由整車(chē)企業(yè)掌握。
電子電氣架構(gòu)作為汽車(chē)的中樞,將定義很多與此前完全不同的相關(guān)標(biāo)準(zhǔn),因?yàn)檫^(guò)去汽車(chē)是一個(gè)封閉的系統(tǒng),而未來(lái)汽車(chē)將是一個(gè)開(kāi)放的系統(tǒng)。自動(dòng)駕駛汽車(chē)普及之后車(chē)企要承擔(dān)行車(chē)安全事故責(zé)任,安全技術(shù)只能自己把握,從這一點(diǎn)出發(fā),車(chē)企也要把電子電氣架構(gòu)和中央控制系統(tǒng)牢牢掌握在自己手里,包括電子電氣架構(gòu)之上的車(chē)載操作系統(tǒng)、基礎(chǔ)應(yīng)用和服務(wù)軟件架構(gòu)等,都要充分理解并融會(huì)貫通。
從對(duì)整車(chē)產(chǎn)品控制權(quán)的角度,祖似杰認(rèn)為,原來(lái)汽車(chē)產(chǎn)品上的控制器是相互獨(dú)立的,而且是嵌入式的,整車(chē)企業(yè)將其中一些交由供應(yīng)商負(fù)責(zé)也不會(huì)有太大問(wèn)題,未來(lái)汽車(chē)產(chǎn)品上的控制系統(tǒng)走向統(tǒng)一,整車(chē)企業(yè)必須自己掌握中央控制系統(tǒng),否則就會(huì)失去對(duì)汽車(chē)產(chǎn)品的控制權(quán)。而把原本高度分散的控制功能逐步整合統(tǒng)一起來(lái),是車(chē)企必須要走的一條正確而艱難的路。
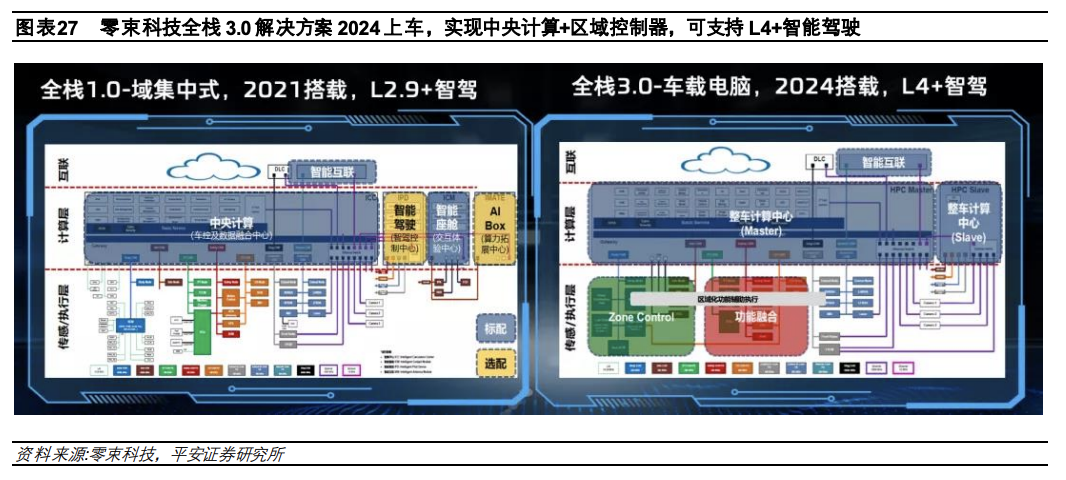
上汽在旗下高端純電智能車(chē)品牌智己、飛凡搭載全棧 1.0 版電子電氣架構(gòu),全棧 1.0 電子電氣架構(gòu)有 3 個(gè)域控制器,即中央計(jì)算(車(chē)控及數(shù)據(jù)融合)、智能駕駛、智能座艙,同時(shí)還保留了較多分布式模塊。
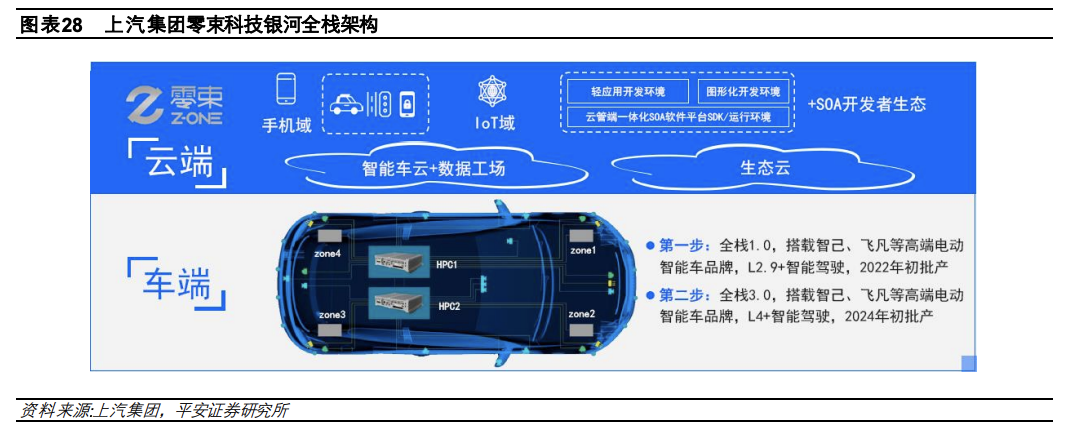
2021 年 7 月啟動(dòng)“零束銀河全棧 3.0 技術(shù)解決方案”的自主研發(fā),進(jìn)一步中央集中化,支持 L4級(jí)以上自動(dòng)駕駛,計(jì)劃 2024 年在上汽旗下智己、飛凡搭載。
零束銀河全棧 3.0 電子電氣架構(gòu)使用主從兩個(gè)高性能計(jì)算單元,即 HPC1 和 HPC2 來(lái)實(shí)現(xiàn)智能駕駛、智能座艙、智能計(jì)算、智能駕駛備份功能,再加 4 個(gè)區(qū)域控制器,實(shí)現(xiàn)各自不同區(qū)域的相關(guān)功能,以全面支撐 L4 以上智能駕駛技術(shù)。
底層狹義操作系統(tǒng)(OS)由異構(gòu)升級(jí)為同構(gòu);骨干通信帶寬擴(kuò)容至千兆甚至萬(wàn)兆;智能車(chē)數(shù)據(jù)工廠全面實(shí)現(xiàn)數(shù)字孿生鏡像,持續(xù)夯實(shí)云、管、端智能車(chē)網(wǎng)絡(luò)安全防護(hù)體系,加速智能車(chē)自學(xué)習(xí)、自成長(zhǎng)和自進(jìn)化,使車(chē)真正成為直連用戶的載體和入口、移動(dòng)的 AIoT 平臺(tái)和數(shù)字化體驗(yàn)空間。
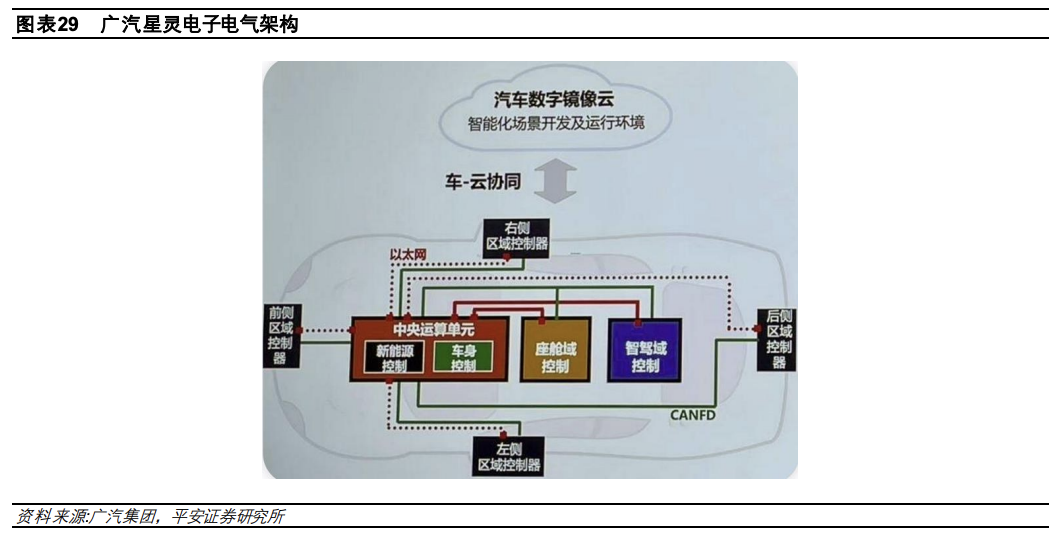
2.7 廣汽星靈電子電氣架構(gòu)
廣汽星靈電子電氣架構(gòu)計(jì)劃于 2023 年搭載到廣汽埃安全新車(chē)型上,其由汽車(chē)數(shù)字鏡像云,中央計(jì)算機(jī)、智能駕駛計(jì)算機(jī)、信息娛樂(lè)計(jì)算機(jī)三個(gè)核心計(jì)算機(jī)群組,以及四個(gè)區(qū)域控制器組成,集成了千兆以太網(wǎng)、5G 和信息安全、功能安全等技術(shù)。相比廣汽上一代電子電氣架構(gòu),新架構(gòu)的算力提升 50 倍,數(shù)據(jù)傳輸速率提升 10 倍,線束回路減少約 40%,控制器減少約20 個(gè)。
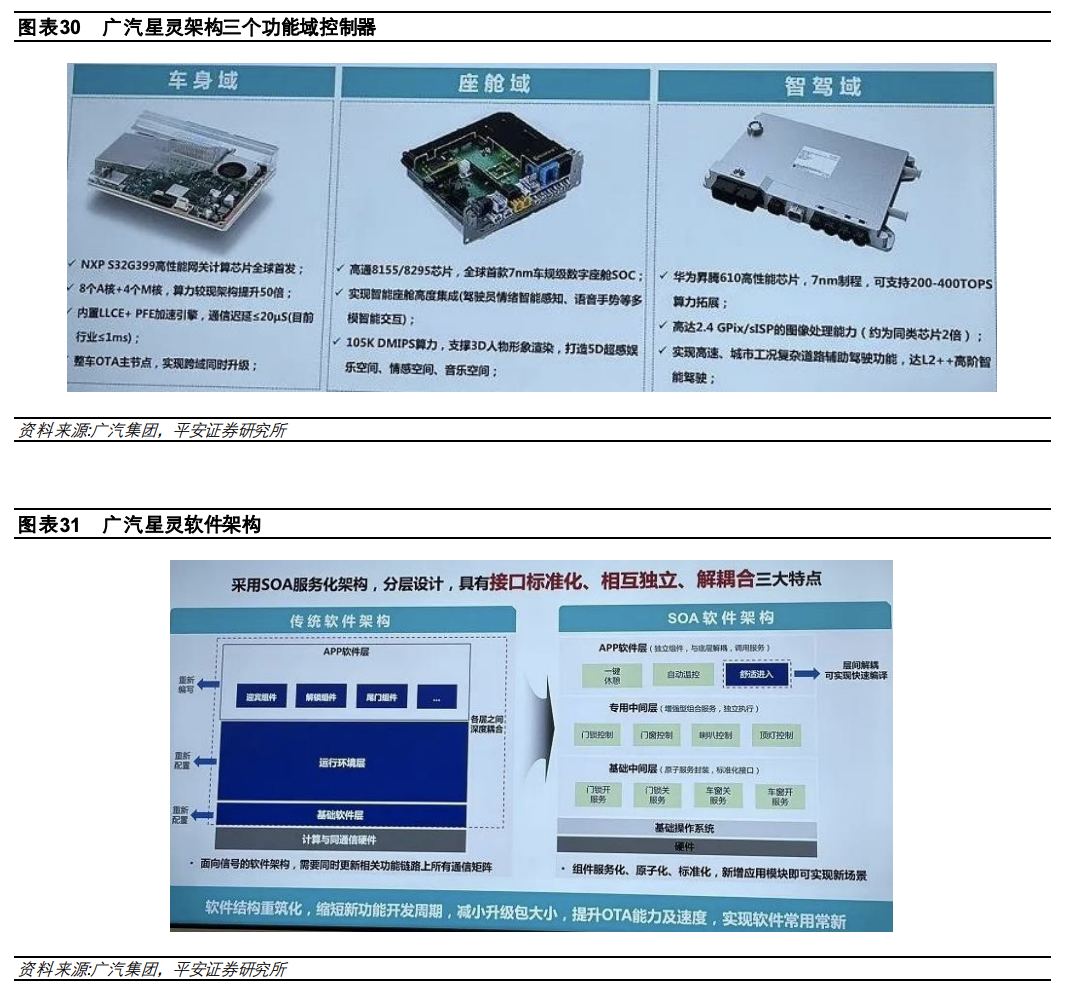
硬件架構(gòu)上三個(gè)功能域控制器+前后左右四個(gè)區(qū)域控制器,與長(zhǎng)城汽車(chē)第四代電子電氣架構(gòu)類似。
其中中央運(yùn)算單元(車(chē)身控制+新能源控制)搭載 NXP S32G399高性能網(wǎng)關(guān)計(jì)算芯片;座艙域搭載高通 8155/8295芯片;智駕域搭載華為昇騰 610高性能芯片,算力為 400TOPS。
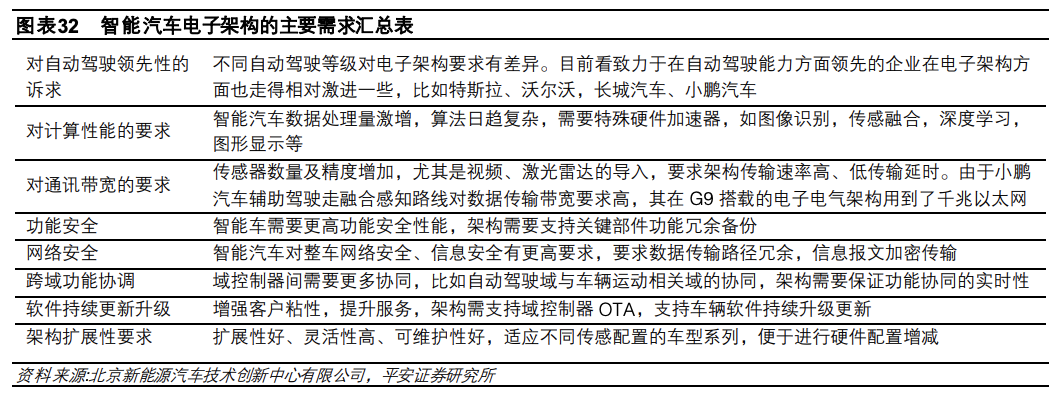
分布于車(chē)身前后左右的 4 個(gè)區(qū)域控制器主要負(fù)責(zé)供電以及執(zhí)行中央控制單元的指令,中央計(jì)算單元與四個(gè)區(qū)域控制器之間采用以太網(wǎng)連接。軟件結(jié)構(gòu)方面,“星靈”架構(gòu)采用了 SOA 軟件架構(gòu)以取代傳統(tǒng)軟件架構(gòu),以實(shí)現(xiàn)組件服務(wù)化、原子化和標(biāo)準(zhǔn)化,新增應(yīng)用模塊即可實(shí)現(xiàn)新場(chǎng)景。
好的電子電氣架構(gòu),一是可以節(jié)省成本,包括制造成本和用車(chē)成本,生產(chǎn)端可以節(jié)省物料,簡(jiǎn)化裝配,提升開(kāi)發(fā)與制造效率,在表層功能差不多的情況下,消費(fèi)者使用電子架構(gòu)集成度更高的車(chē)能耗可能更低。二是快速提供豐富多樣的功能,主機(jī)廠可以針對(duì)不同場(chǎng)景開(kāi)發(fā)各式功能,比如特斯拉的座椅加熱、節(jié)日模式等,而且功能更新也應(yīng)該是主機(jī)廠可以把控,不需要像過(guò)去功能車(chē)那樣為改變一個(gè)功能而進(jìn)行一次復(fù)雜的供應(yīng)鏈組織。
如果沒(méi)有底層架構(gòu)的升級(jí),無(wú)論表面有多少智能化的功能,都還不能算是真正的智能車(chē)。比如分布式電子電氣架構(gòu)也可以實(shí)現(xiàn)自動(dòng)泊車(chē)和 L2 智能駕駛功能的,但由于架構(gòu)的限制,無(wú)法把傳感器接入到一個(gè)智能駕駛域控制器中,只能搭載兩個(gè)獨(dú)立的控制單元——泊車(chē)控制器、行車(chē)控制器,無(wú)法共用算力及傳感硬件,這就導(dǎo)致資源浪費(fèi),且在后續(xù)功能升級(jí)中存在掣肘。產(chǎn)品定義是架構(gòu)開(kāi)發(fā)的前提,車(chē)企將根據(jù)自己的品牌形象、產(chǎn)品定位、目標(biāo)客戶、內(nèi)部資源去做出取舍。比如車(chē)企可能優(yōu)先選擇在智能座艙方面的集成,而輔助駕駛部分采用低成本的分布式方案。也可能優(yōu)先選擇在底盤(pán)、車(chē)身控制方面做高度集成。不同車(chē)企的品牌矩陣、車(chē)型結(jié)構(gòu)有差異,架構(gòu)也需要考慮平臺(tái)公用性和沿用性。
03 架構(gòu)演進(jìn)驅(qū)動(dòng)主機(jī)廠多重變化
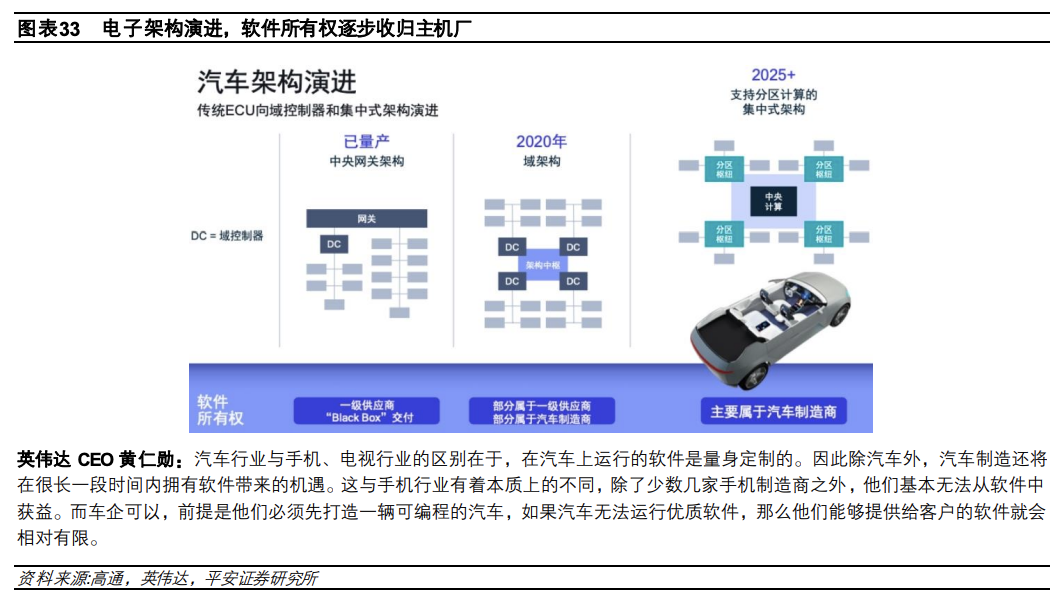
3.1 架構(gòu)演進(jìn),汽車(chē)軟件所有權(quán)逐漸收歸主機(jī)廠
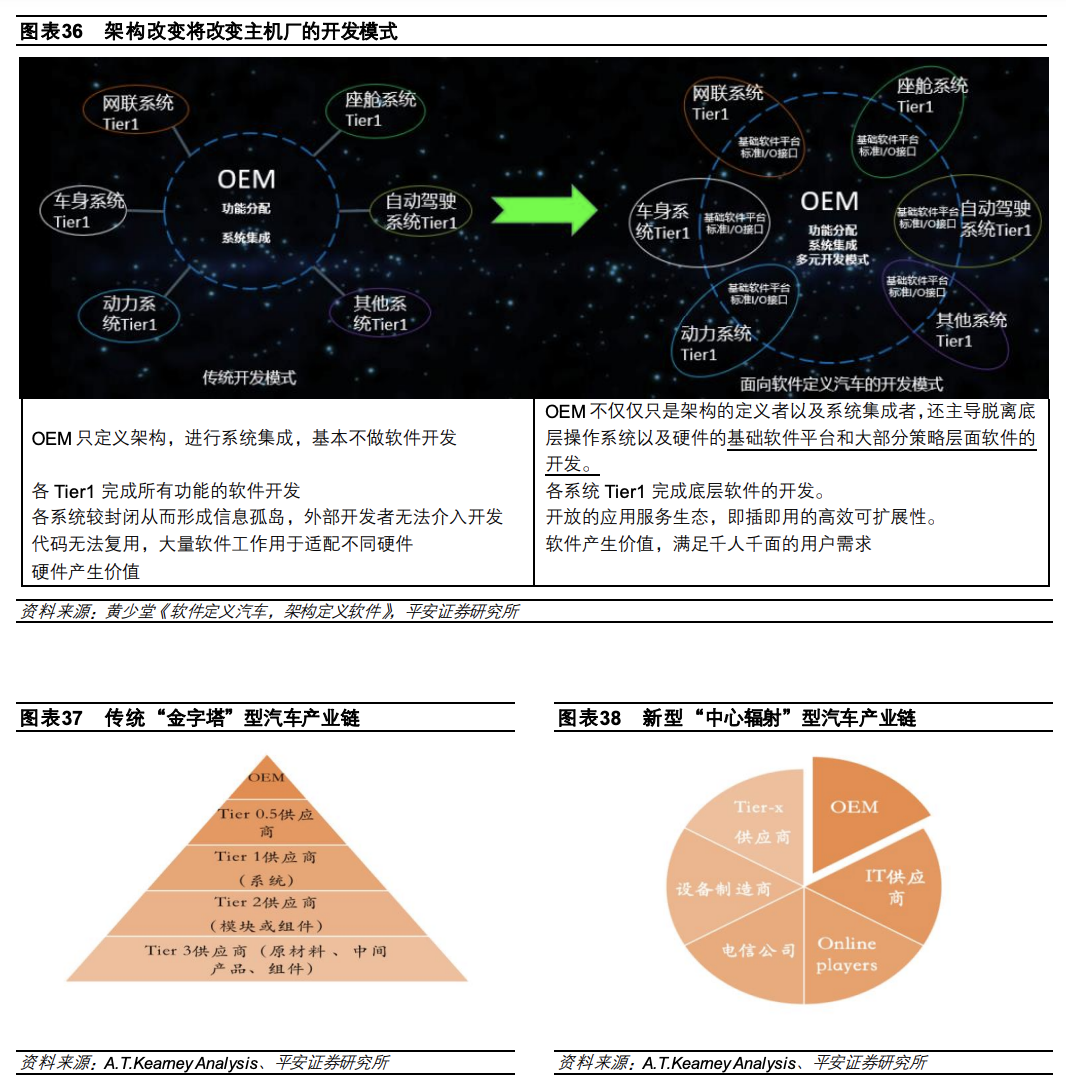
汽車(chē)電子架構(gòu)邁向中央計(jì)算,ECU 數(shù)量減少,意味著原先軟硬一體的模塊拆解出來(lái),再進(jìn)行域控制器的集中,而這并非簡(jiǎn)單的物理集成,越來(lái)越多的主機(jī)廠正在收攏更多主導(dǎo)權(quán),從應(yīng)用層軟件到中間件,到底層軟件,甚至到核心硬件,都希望實(shí)現(xiàn)全棧覆蓋,這個(gè)過(guò)程是主機(jī)廠將原先軟硬一體的供應(yīng)商的軟件部分抽取出來(lái)聚集于自身的過(guò)程。受制于現(xiàn)存供應(yīng)鏈和自身軟件實(shí)力弱,這會(huì)是一個(gè)漸進(jìn)的過(guò)程。一旦電子電氣架構(gòu)進(jìn)入中央計(jì)算+區(qū)域控制階段以后,汽車(chē)軟件所有權(quán)將主要屬于主機(jī)廠,主機(jī)廠將長(zhǎng)期享有軟件紅利,比傳統(tǒng)車(chē)時(shí)代擁有更強(qiáng)的產(chǎn)業(yè)鏈話語(yǔ)權(quán),主機(jī)廠將把產(chǎn)品持續(xù)更新的命脈握在自己手中。
分布式架構(gòu)下,主機(jī)廠相當(dāng)于一個(gè)硬件集成者,Tier1 把上游的 Tier2(嵌入式軟件供應(yīng)商、芯片供應(yīng)商)打包后提供給主機(jī)廠,為提高產(chǎn)品把控權(quán),主機(jī)廠在功能車(chē)時(shí)代一般選擇自研高價(jià)值模塊,也是消費(fèi)者能感受到的差異化部分,即動(dòng)力總成部分。
第二階段的功能域部分,類似功能合并為域,軟件逐步從過(guò)去的黑盒中分離,主機(jī)廠出于原有供應(yīng)鏈和自身軟件能力的考慮,選擇直接與原來(lái)的 Tier1/2 合作,在應(yīng)用軟件層,可能選擇合作模式,也可能選擇自研模式,比如小鵬、長(zhǎng)城的自動(dòng)駕駛算法選擇自研,而其它一些主機(jī)廠選擇與百度、momenta、小馬智行、華為進(jìn)行合作。這時(shí)主機(jī)廠根據(jù)能力不同,對(duì)域控制器的軟硬件部分參與程度不一,由此域控制器供應(yīng)商的服務(wù)也不同,對(duì)于自研程度深的主機(jī)廠,域控制器供應(yīng)商相當(dāng)于純代工角色,對(duì)于自研程度淺的主機(jī)廠來(lái)說(shuō),域控制器供應(yīng)商相當(dāng)于全方位的“保姆”角色。
第三階段跨出功能域框架,進(jìn)入中央計(jì)算+區(qū)域控制階段以后,大部分 ECU消失,各傳感器/執(zhí)行器被中央計(jì)算單元支配,原屬于 Tier1的大部分策略層的軟件由主機(jī)廠主導(dǎo),主機(jī)廠對(duì)軟件中的高價(jià)值模塊的介入程度漸深,因此主機(jī)廠必須要有專業(yè)的軟件團(tuán)隊(duì),以集成自研與外包軟件,軟件所有權(quán)主要屬于汽車(chē)制造商。大眾汽車(chē)計(jì)劃到 2030年將軟件自研比率提升到 60%(聚焦于人工智能、大數(shù)據(jù)、保密以及安全),雖然自研比例大幅提升,外采軟件總規(guī)模也將增長(zhǎng),但大眾將定義車(chē)載軟件的標(biāo)準(zhǔn)和路線圖。CARIAD業(yè)務(wù)規(guī)劃主要涵蓋四塊內(nèi)容:1)電子電氣架構(gòu) E3架構(gòu);2)VW.OS(大眾汽車(chē)操作系統(tǒng));3)VW.AC(大眾汽車(chē)云);4)關(guān)鍵應(yīng)用。
自研高價(jià)值模塊的多少將很大程度決定不同主機(jī)廠的盈利能力,類似于不同消費(fèi)電子品牌有著巨大的盈利能力差異(近三年蘋(píng)果凈利率 20-26%,小米凈利率 5-8%)。主機(jī)廠根據(jù)自身業(yè)務(wù)體量、研發(fā)實(shí)力、現(xiàn)金流狀況、歷史包袱等評(píng)估適合自己的路徑。平價(jià)與豪華,燃油與電動(dòng)都將做出截然不同的轉(zhuǎn)型選擇。
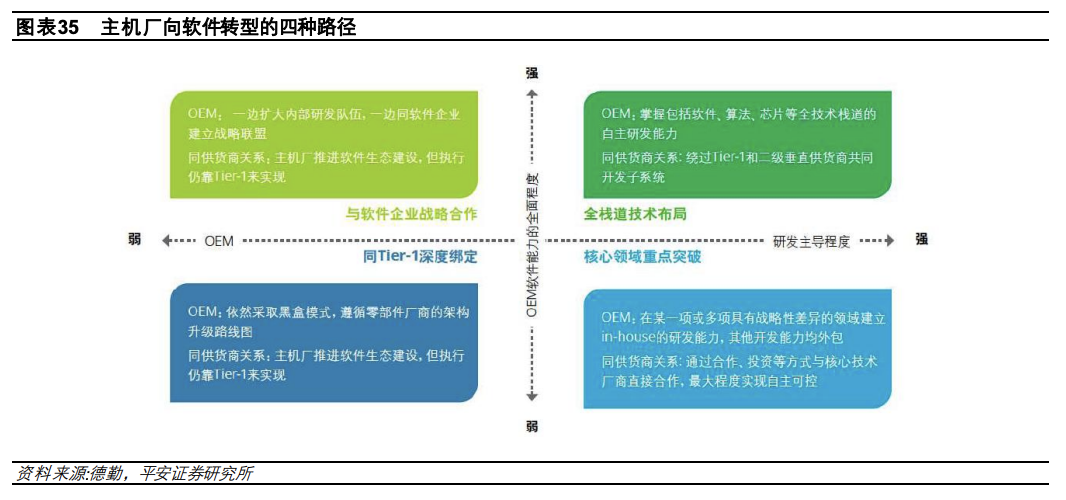
1)第一梯隊(duì),比如特斯拉,實(shí)現(xiàn)芯片、操作系統(tǒng)、中間件、域控制器系統(tǒng)集成等核心領(lǐng)域全自研,硬件外包。
2)選擇一到兩個(gè)核心技術(shù)上重點(diǎn)突破。比如自動(dòng)駕駛感知算法是否選擇自研。從自動(dòng)駕駛算法自研落地節(jié)奏看,小鵬、長(zhǎng)城、華為相對(duì)靠前。也有主機(jī)廠選擇自研座艙芯片,比如吉利汽車(chē)旗下的億咖通。
3)多手準(zhǔn)備。主機(jī)廠一方面組建自己的軟件團(tuán)隊(duì),另一方面積極同科技企業(yè)/互聯(lián)網(wǎng)公司建立合作聯(lián)盟,在自身?yè)碛谐墒斓能浖_(kāi)發(fā)能力之前,基礎(chǔ)軟件,軟硬件架構(gòu)方案仍依賴 TIER-1 或新興軟件企業(yè)。比如上汽集團(tuán)的零束,目前跟外部各類企業(yè)合作較多,涵蓋SOC 芯片企業(yè)、算法公司、域控制器供應(yīng)商等(高通、地平線、聯(lián)合電子、momenta)。
4)車(chē)企只做品牌運(yùn)營(yíng),軟件開(kāi)發(fā)主要外包,零部件作為一個(gè)系統(tǒng)整體打包給大型供應(yīng)商或者互聯(lián)網(wǎng)企業(yè)。
隨著電子電氣架構(gòu)演進(jìn),從安全、數(shù)據(jù)、用戶三個(gè)維度看主機(jī)廠的地位變化:
1) 電子架構(gòu)向車(chē)云一體發(fā)展將使得智能車(chē)成為一個(gè)更加開(kāi)放的智能觸點(diǎn),安全要求大幅提高,整車(chē)廠是第一責(zé)任體。
2) 選擇輔助駕駛自研的主機(jī)廠,輔助駕駛功能將越用越好。隨著輔助駕駛漸進(jìn)式演進(jìn),越來(lái)越多原先做 L4 的算法公司開(kāi)始與主機(jī)廠合作,這也說(shuō)明有效里程產(chǎn)生的數(shù)據(jù)成為下一階段輔助駕駛能力能否領(lǐng)先的關(guān)鍵點(diǎn)。
3) OEM 將在車(chē)輛全生命周期內(nèi)實(shí)時(shí)直鏈用戶,與 C端粘性顯著增強(qiáng),用戶運(yùn)營(yíng)、遠(yuǎn)程診斷與服務(wù)將成主機(jī)廠基于存量車(chē)的業(yè)務(wù)觸發(fā)點(diǎn)。
傳統(tǒng)車(chē)企的 V 型研發(fā)模式(包含機(jī)械硬件測(cè)試、供應(yīng)鏈協(xié)同、造型設(shè)計(jì)等)需要 5-7年的研發(fā)周期,無(wú)法適應(yīng)移動(dòng)服務(wù)的快速迭代和存量用戶的運(yùn)營(yíng)。未來(lái)軟硬件分離研發(fā),在軟件上變革為閉環(huán)開(kāi)發(fā)模式,快速迭代,而硬件可提前預(yù)埋并在相當(dāng)長(zhǎng)時(shí)間保持原狀。
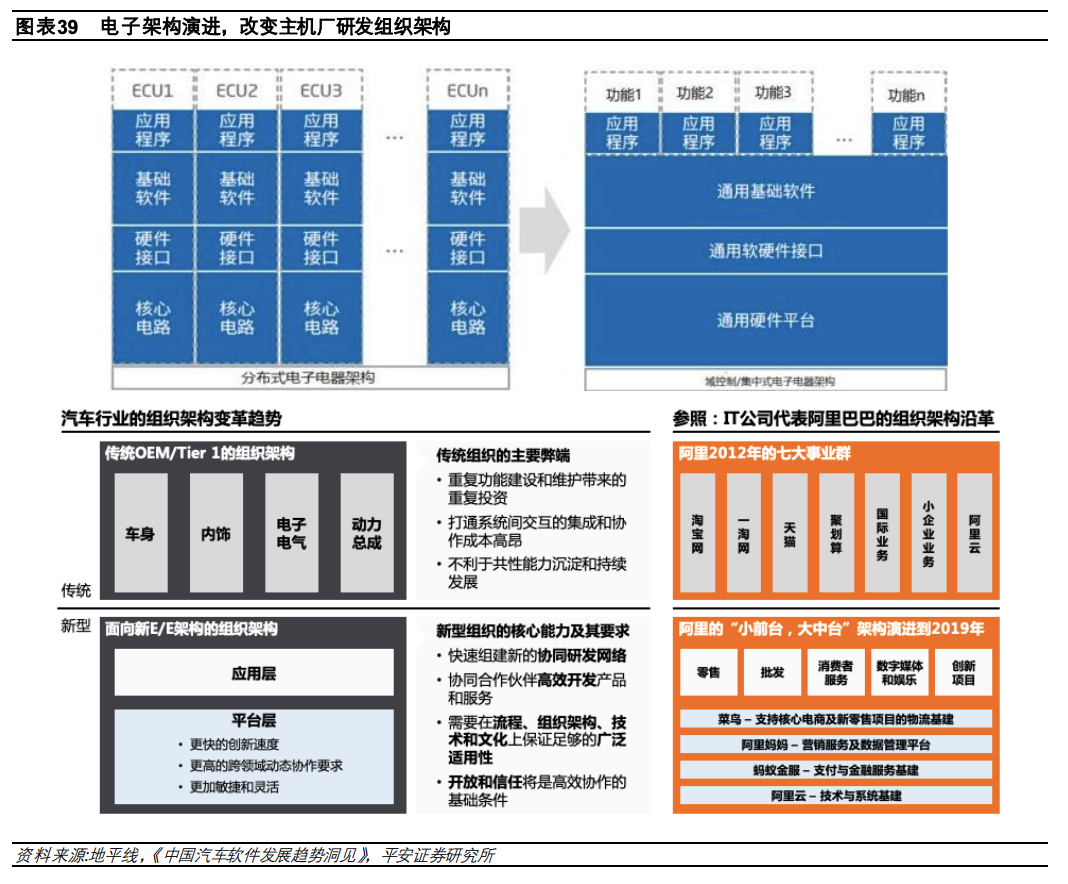
電子架構(gòu)演進(jìn),改變主機(jī)廠組織架構(gòu):
馬爾文康威 1967 提出的康威定律提出:一個(gè)組織設(shè)計(jì)出的系統(tǒng)/產(chǎn)品即該組織內(nèi)部溝通結(jié)構(gòu)的縮影。這意味著企業(yè)想要獲得什么樣的產(chǎn)品/系統(tǒng),就需要什么樣的組織及組織文化。
在分布式 ECU 時(shí)代,車(chē)企只需要做集成硬件即可完成產(chǎn)品生產(chǎn)交付;到了功能域控制器時(shí)代,軟件從分布式 ECU 回收上移至功能域控制器,但各部門(mén)依然按照功能劃分,比如劃為智能座艙、智能駕駛和智能車(chē)控三個(gè)部門(mén);功能域再往前演進(jìn),在中央計(jì)算平臺(tái)時(shí)代,硬件完成大一統(tǒng)整合,軟硬件開(kāi)發(fā)解耦,軟件與分層解耦,開(kāi)發(fā)團(tuán)隊(duì)的調(diào)整不可避免,煙囪式的以功能劃分的組織設(shè)計(jì)將被打破。因此近年來(lái)主機(jī)廠紛紛成立數(shù)字化中心、軟件中心等新的組織,就是為了適應(yīng)這種發(fā)展趨勢(shì)。
2021 年長(zhǎng)城汽車(chē)形成“強(qiáng)后臺(tái)、大中臺(tái)、小前臺(tái)”的 3.0 版本組織架構(gòu):強(qiáng)后臺(tái)就是儲(chǔ)備最優(yōu)質(zhì)、更前沿的技術(shù),通過(guò)大量、前沿的預(yù)研投入保持領(lǐng)先。廣義的后臺(tái)除技術(shù)外,還包括機(jī)制質(zhì)量、人力資源政策、戰(zhàn)略布局和資本運(yùn)作等內(nèi)容;大中臺(tái)在小前臺(tái)的作戰(zhàn)中,隨時(shí)給予及時(shí)的補(bǔ)給和支援,以面向用戶的小前臺(tái)為核心,形成“一車(chē)一品牌一公司”的組織形態(tài),打造出了若干個(gè)運(yùn)營(yíng)組織。目前看,車(chē)企都在通過(guò)各種組織創(chuàng)新以順應(yīng)電子電氣架構(gòu)演進(jìn)趨勢(shì)。
伴隨著架構(gòu)演進(jìn)過(guò)程,車(chē)企的軟件中心/科技公司/數(shù)字化中心需要大量研發(fā)投入:以大眾軟件公司 CARIAD為例,其計(jì)劃自研 60%軟件,聚焦于:1)電子電氣架構(gòu) E3架構(gòu);2)VW.OS(大眾汽車(chē)操作系統(tǒng));3)VW.AC(大眾汽車(chē)云);4)關(guān)鍵應(yīng)用,目標(biāo)是到 2025 年擁有 10000 名工程師。大眾汽車(chē)計(jì)劃每年投入 25-30 億歐元于 CARIAD。
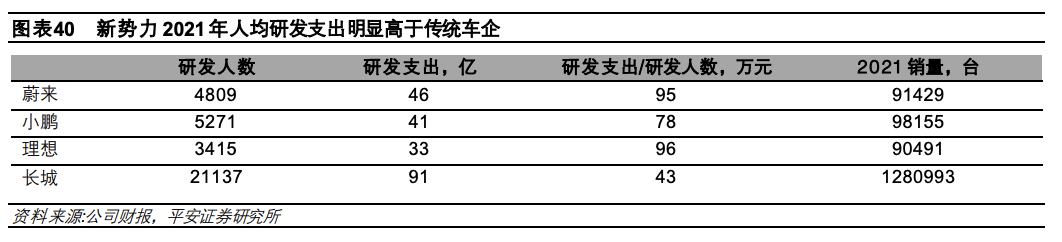
電子架構(gòu)演進(jìn),改變主機(jī)廠研發(fā)人才結(jié)構(gòu):未來(lái)車(chē)企在軟件方面的研發(fā)人才占比將迅速上升,長(zhǎng)城汽車(chē) 2021年中宣布:計(jì)劃到 2023年全球研發(fā)人員將達(dá) 3萬(wàn)人,其中軟件開(kāi)發(fā)人才 1萬(wàn)人。對(duì)比新勢(shì)力和傳統(tǒng)車(chē)企的研發(fā)支出情況,我們可以明顯看出新成立車(chē)企對(duì)軟件研發(fā)的傾斜度更高,因?yàn)樗麄兗毙枰浴叭珬W匝小眮?lái)形成差異化的特點(diǎn)以取得在全新賽道上的領(lǐng)先。因?yàn)檠邪l(fā)人員平均支出高,研發(fā)支出絕對(duì)金額隨著自研比例的上升呈大幅上升,比如蔚來(lái)汽車(chē) 2022 年研發(fā)支出指引為 90億左右,與 2021 年長(zhǎng)城汽車(chē)的研發(fā)支出規(guī)模相當(dāng)。
目前國(guó)內(nèi)一個(gè)車(chē)身控制器開(kāi)發(fā)費(fèi)為 1000 萬(wàn)+,據(jù)某主機(jī)廠電子電氣架構(gòu)總工程師預(yù)測(cè),做一個(gè)全新的架構(gòu),把所有的控制器都開(kāi)發(fā)到量產(chǎn)的狀態(tài),在軟件 BUG比較少的情況下上市交付,至少得幾十億投入。再看各大主機(jī)廠軟件中心的投入,一個(gè)軟件開(kāi)發(fā)人員的年度綜合成本至少為 100 萬(wàn)元,假設(shè)軟件隊(duì)伍 1000 人,則一年人員投入為 10 億,如果再加上工具鏈等其它相關(guān)投入,一年支出為 20 個(gè)億。
3.2 架構(gòu)升級(jí)使得主機(jī)廠盈利模式多樣化成為可能
基于邁向中央計(jì)算的電子電氣架構(gòu),主機(jī)廠原有盈利模式將被大幅拓寬。
由于車(chē)企擁有大量移動(dòng)終端,未來(lái)將擁有海量數(shù)據(jù)(涉及車(chē)身數(shù)據(jù),環(huán)境數(shù)據(jù),駕駛數(shù)據(jù),車(chē)內(nèi)人的各類數(shù)據(jù)),并可在全生命周期直達(dá)用戶,據(jù)此可衍生出多類業(yè)務(wù)模式,如軟件算法、虛擬司機(jī)、出行服務(wù)、運(yùn)營(yíng)平臺(tái)、售后服務(wù)及診斷等;更長(zhǎng)遠(yuǎn)地看,無(wú)人駕駛出現(xiàn)后,車(chē)輛出現(xiàn)的軟件生態(tài)還擁有更廣闊的想象空間。
目前一些整車(chē)品牌已在進(jìn)行車(chē)輛靜止?fàn)顟B(tài)下的座艙創(chuàng)新,以激發(fā)并滿足日益增加的娛樂(lè)、休憩等各類需求,這也使得車(chē)輛超越了單純物理移動(dòng)的意義,類似于智能手機(jī)早就超越了單純的通信意義。
特斯拉車(chē)內(nèi)已內(nèi)置 22 種游戲,技術(shù)部門(mén)正努力將 steam 上的游戲庫(kù)引入旗下車(chē)輛,未來(lái)特斯拉車(chē)機(jī)將支持流暢運(yùn)行 steam。硬件上,2022 年特斯拉全系車(chē)輛將搭載 AMD Ryzen 芯片組,性能上媲美最新款的索尼游戲主機(jī) Playstation5。
隨著內(nèi)容生態(tài)的日漸豐富,未來(lái)汽車(chē)可能參與內(nèi)容的分成,這可能成為一個(gè)空間巨大的收入來(lái)源。
在大眾汽車(chē) 2030 NEW AUTO 戰(zhàn)略中,大眾描述了未來(lái)的汽車(chē)及其應(yīng)用場(chǎng)景:未來(lái)的汽車(chē)將發(fā)展成為一個(gè)靜修空間、移動(dòng)辦公室、居家旅行沙龍亦或小憩休整的場(chǎng)所,由于技術(shù)進(jìn)步,汽車(chē)將逐漸褪去負(fù)面屬性(事故、污染等),汽車(chē)將成為比現(xiàn)在更受歡迎的個(gè)人出行方式。
大眾估計(jì) 2030 年汽車(chē)市場(chǎng)規(guī)模將達(dá) 5 萬(wàn)億歐元,十倍于目前的智能手機(jī)市場(chǎng)規(guī)模,這主要是得益于軟件和自動(dòng)駕駛服務(wù)能力的提升。
大眾將在汽車(chē)業(yè)新未來(lái)形成新的商業(yè)模式,利潤(rùn)池由整車(chē)硬件、軟件、電池與充電、移動(dòng)出行解決方案構(gòu)成。大眾認(rèn)為未來(lái)汽車(chē)依然是個(gè)性化的產(chǎn)品(以為顧客還是需要差異化的汽車(chē)外形、品牌和服務(wù)的),但與傳統(tǒng)汽車(chē)時(shí)代相比,品牌的差異性將更多的來(lái)自于軟件與服務(wù)。
大眾汽車(chē)計(jì)劃未來(lái)的利潤(rùn)池除了整車(chē)銷(xiāo)售、整車(chē)平臺(tái)出售、還包括軟件外售、電池及補(bǔ)能服務(wù)、出行解決方案(算法外售、移動(dòng)服務(wù)),面對(duì)消費(fèi)者,服務(wù)可以按需付費(fèi)激活,在此之前大眾汽車(chē)將完成硬件平臺(tái)的統(tǒng)一(即 SSP 平臺(tái))、統(tǒng)一的軟件架構(gòu)(電氣架構(gòu) E3 2.0 版+VW.OS)。


審核編輯 :李倩
-
集成電路
+關(guān)注
關(guān)注
5387文章
11530瀏覽量
361639 -
汽車(chē)電子
+關(guān)注
關(guān)注
3026文章
7941瀏覽量
166910 -
架構(gòu)
+關(guān)注
關(guān)注
1文章
513瀏覽量
25468
原文標(biāo)題:萬(wàn)字講述汽車(chē)電子電氣架構(gòu)演進(jìn)
文章出處:【微信號(hào):智能汽車(chē)電子與軟件,微信公眾號(hào):智能汽車(chē)電子與軟件】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
汽車(chē)電子電氣架構(gòu)線束和連接器分析
急聘兼職打字員600元萬(wàn)字地區(qū)無(wú)限
汽車(chē)電子電氣架構(gòu)設(shè)計(jì)及優(yōu)化措施
汽車(chē)電子電氣架構(gòu)開(kāi)發(fā)咨詢服務(wù)內(nèi)容和優(yōu)勢(shì)
介紹汽車(chē)電子電氣架構(gòu)的演變和發(fā)展
什么是電子電氣架構(gòu)?汽車(chē)電子電氣架構(gòu)面臨的挑戰(zhàn)
深度解讀汽車(chē)電子電氣架構(gòu)演進(jìn)歷程

自動(dòng)駕駛汽車(chē)電子電氣架構(gòu)

自動(dòng)駕駛汽車(chē)電子電氣架構(gòu)技術(shù)開(kāi)發(fā)
近萬(wàn)字長(zhǎng)文盤(pán)點(diǎn)!2022十大AR工業(yè)典型案例,不可不看!

一文詳解電子電氣架構(gòu)的演進(jìn)

汽車(chē)電子電氣架構(gòu)為什么要做中央集成?

如何用AI聊天機(jī)器人寫(xiě)出萬(wàn)字長(zhǎng)文
智能網(wǎng)聯(lián)汽車(chē)電子電氣架構(gòu)詳解

- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測(cè)量?jī)x表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無(wú)線
- 接口/總線/驅(qū)動(dòng)
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲(chǔ)技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車(chē)電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動(dòng)通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測(cè)
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識(shí)
- 工具箱
- VIP會(huì)員
- 最新技術(shù)文章
- 社區(qū)
- 小組
- 論壇
- 問(wèn)答
- 評(píng)測(cè)試用
- 企業(yè)服務(wù)
- 產(chǎn)品
- 資料
- 文章
- 方案
- 企業(yè)
- 供應(yīng)鏈服務(wù)
- 硬件開(kāi)發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會(huì)
- 活動(dòng)策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測(cè)驗(yàn)
- 設(shè)計(jì)大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動(dòng)態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動(dòng)端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內(nèi)容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區(qū)合作
- 劉勇:liuyong@huaqiu.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開(kāi)發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
評(píng)論