


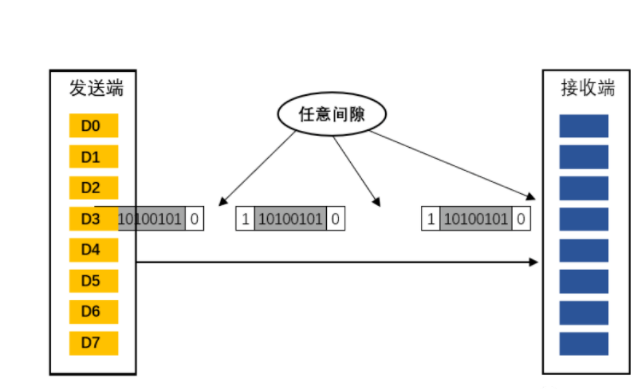
串口通信的接口標準有很多,有 RS-232C、RS-232、RS-422A、RS-485 等。常用的就是 RS-232 和 RS-485。RS-232 其實是 RS-232C 的改進,原理是一樣的。我們所使用的串口(USART)又稱為通用同步異步收發器,我們所使用的是異步串行通信,異步串行通信示意圖如下所示:
2、串口軟件配置
#include "stm32f10x.h"
void LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure; //定義結構體變量
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);//開啟時鐘
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0; //選擇你要設置的IO口
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP; //設置推挽輸出模式
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; //設置傳輸速率
GPIO_Init(GPIOC,&GPIO_InitStructure); //初始化GPIO
GPIO_SetBits(GPIOC,GPIO_Pin_0); //將LED端口拉高,熄滅所有LED
}
// USART1初始化函數
void USART1_Init(u32 bound)
{
//GPIO端口設置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
/* 配置GPIO的模式和IO口 */
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_9;//TX //串口輸出PA9
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP; //復用推挽輸出
GPIO_Init(GPIOA,&GPIO_InitStructure); /* 初始化串口輸入IO */
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_10;//RX //串口輸入PA10
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING; //模擬輸入
GPIO_Init(GPIOA,&GPIO_InitStructure); /* 初始化GPIO */
//USART1 初始化設置
USART_InitStructure.USART_BaudRate = bound;//波特率設置
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字長為8位數據格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一個停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//無奇偶校驗位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//無硬件數據流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收發模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_Cmd(USART1, ENABLE); //使能串口1
USART_ClearFlag(USART1, USART_FLAG_TC);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//開啟相關中斷
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;//串口1中斷通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3;//搶占優先級3
NVIC_InitStructure.NVIC_IRQChannelSubPriority =3; //子優先級3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根據指定的參數初始化VIC寄存器、
}
// USART1中斷函數
void USART1_IRQHandler(void) //串口1中斷服務程序
{
u8 r;
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中斷
{
r =USART_ReceiveData(USART1);//(USART1->DR); //讀取接收到的數據
USART_SendData(USART1,r);
while(USART_GetFlagStatus(USART1,USART_FLAG_TC) != SET);
}
USART_ClearFlag(USART1,USART_FLAG_TC);
}
int main( void )
{
LED_Init();
USART1_Init(115200);
while(1)
{
GPIO_ResetBits(GPIOC,GPIO_Pin_0);
}
}
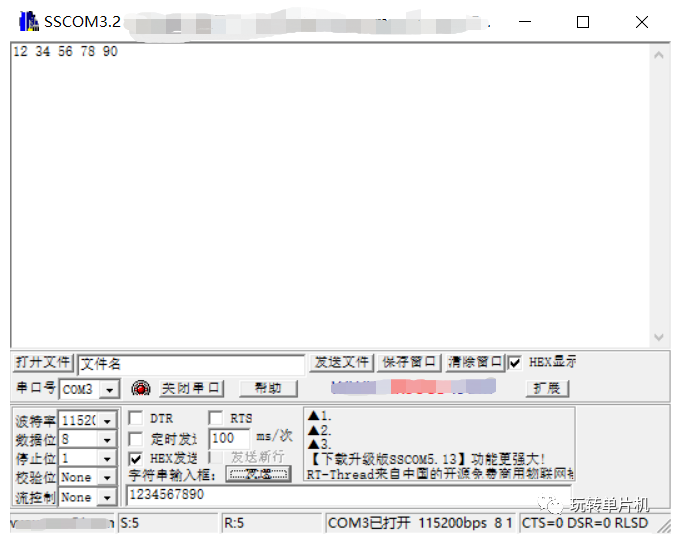
3、驗證程序是否通過測試,下圖可以看出程序可以正常使用
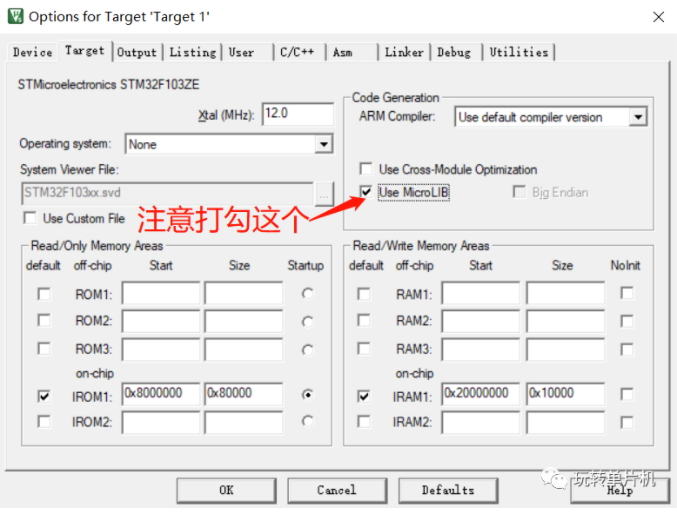
4、重定向配置
#include "stm32f10x.h"
#include "stdio.h"
void LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure; //定義結構體變量
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);//開啟時鐘
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0; //選擇你要設置的IO口
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP; //設置推挽輸出模式
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; //設置傳輸速率
GPIO_Init(GPIOC,&GPIO_InitStructure); //初始化GPIO
GPIO_SetBits(GPIOC,GPIO_Pin_0); //將LED端口拉高,熄滅所有LED
}
void USART_init(uint32_t bound)
{
GPIO_InitTypeDef GPIO_InitStruct; //定義GPIO結構體變量
USART_InitTypeDef USART_InitStruct; //定義串口結構體變量
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_USART1,ENABLE); //使能GPIOC的時鐘
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_9; //配置TX引腳
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP; //配置PA9為復用推挽輸出
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz; //配置PA9速率
GPIO_Init(GPIOA,&GPIO_InitStruct); //GPIO初始化函數
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_10; //配置RX引腳
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_IN_FLOATING; //配置PA10為浮空輸入
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz; //配置PA10速率
GPIO_Init(GPIOA,&GPIO_InitStruct); //GPIO初始化函數
USART_InitStruct.USART_Mode=USART_Mode_Tx|USART_Mode_Rx; //發送接收模式
USART_InitStruct.USART_Parity=USART_Parity_No; //無奇偶校驗
USART_InitStruct.USART_BaudRate=bound; //波特率
USART_InitStruct.USART_StopBits=USART_StopBits_1; //停止位1位
USART_InitStruct.USART_WordLength=USART_WordLength_8b; //字長8位
USART_InitStruct.USART_HardwareFlowControl=USART_HardwareFlowControl_None; //無硬件數據流控制
USART_Init(USART1,&USART_InitStruct); //串口初始化函數
USART_Cmd(USART1,ENABLE); //使能USART1
}
int fputc(int ch,FILE *f) //printf重定向函數
{
USART_SendData(USART1,(uint8_t)ch); //發送一字節數據
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE) == RESET); //等待發送完成
return ch;
}
int main( void )
{
uint32_t i;
LED_Init();
USART_init(115200);
while(1)
{
GPIO_ResetBits(GPIOC,GPIO_Pin_0);
for(i=0;i<655350;i++);
printf("printf testrn");
}
}
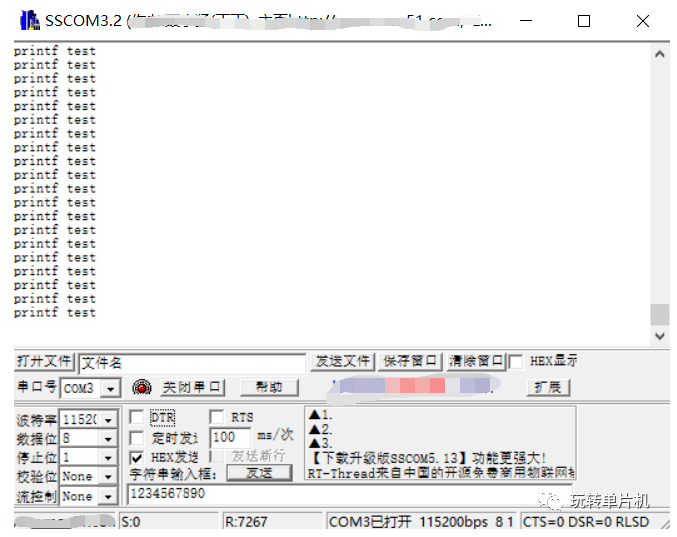
5、驗證程序,下圖可以看出程序正常
--END--
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
接口
+關注
關注
33文章
9019瀏覽量
153823 -
串口通信
+關注
關注
34文章
1640瀏覽量
56879 -
RS-232C
+關注
關注
0文章
5瀏覽量
5550
發布評論請先 登錄
相關推薦
熱點推薦
如何進行電腦與STM32的串口通信
我現在需要進行電腦與STM32的串口通信,因為電腦是WIN7的所以在進行串口通信時,用原子大哥的調試助手會報錯誤8020,我自己編的VB
發表于 06-02 12:18
如何利用Arduino IDE去完成stm32的串口通信呢
怎樣安裝Arduino IDE并完成相關配置呢?如何利用Arduino IDE去完成stm32的串口通信呢?
發表于 12-07 06:48
基于是stm32的串口通信
文章目錄一、串口協議和RS-232標準(一)、TTL電平標準(二)、RS232標準二、搭建STM32開發環境1.安裝jdk2.安裝STM32CubeMX一、串口協議和RS-232標準
發表于 12-16 16:57
?7次下載

Arduino下的STM32的串口通信
Arduino下的STM32的串口通信一、任務要求二、Arduino的安裝和配置1、安裝Ardunio2、配置Arduino三、程序1、連接stm32的開發板2、編輯代碼3、燒錄程序4
發表于 12-24 18:42
?15次下載
2021-07-29 Openmv與stm32 的串口通信(HAL庫)
Openmv與stm32 的串口通信前言假期準備參加電賽,學習了openmv,openmv識別到的數據傳到STM32,然后進行下一步的處理,為了實現來著之間的
發表于 12-24 18:47
?9次下載





 工商網監
工商網監

評論