

三相全波無(wú)刷電機(jī)的結(jié)構(gòu)
從本文開(kāi)始,我們將介紹三相無(wú)刷電機(jī)的結(jié)構(gòu)、三相無(wú)刷電機(jī)的工作原理及三相無(wú)刷電機(jī)的驅(qū)動(dòng)方法等內(nèi)容。首先是三相無(wú)刷電機(jī)的結(jié)構(gòu)。
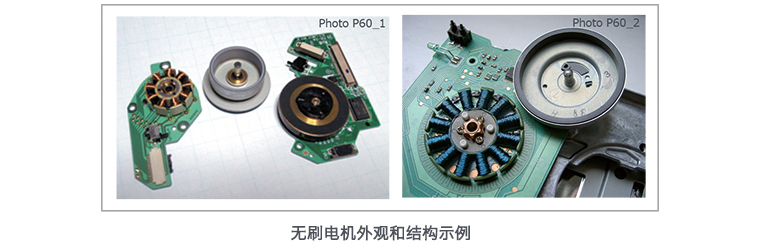
三相全波無(wú)刷電機(jī)的外觀和結(jié)構(gòu)
左側(cè)是用來(lái)旋轉(zhuǎn)光盤(pán)播放設(shè)備中的光盤(pán)的主軸電機(jī)示例。共有三相×3共9個(gè)線圈。右側(cè)是FDD設(shè)備的主軸電機(jī)示例,共有12個(gè)線圈(三相×4)。線圈被固定在電路板上,并纏繞在鐵芯上。
在線圈右側(cè)的盤(pán)狀部件是永磁體轉(zhuǎn)子。外圍是永磁體,轉(zhuǎn)子的軸插入線圈的中心部位并覆蓋住線圈部分,永磁體圍繞在線圈的外圍。
三相全波無(wú)刷電機(jī)的內(nèi)部結(jié)構(gòu)圖和線圈連接等效電路
接下來(lái)是內(nèi)部結(jié)構(gòu)簡(jiǎn)圖和線圈連接等效電路示意圖。
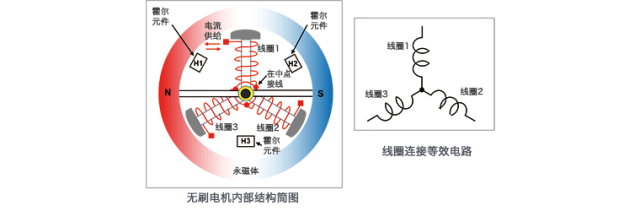
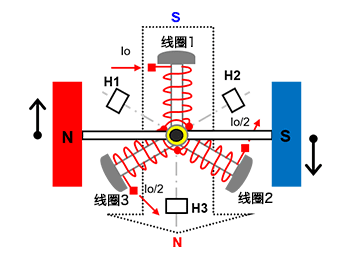
該內(nèi)部結(jié)構(gòu)簡(jiǎn)圖是結(jié)構(gòu)很簡(jiǎn)單的2極(2個(gè)磁體)3槽(3個(gè)線圈)電機(jī)示例。它類似于極數(shù)和槽數(shù)相同的有刷電機(jī)結(jié)構(gòu),但線圈側(cè)是固定的,磁體可以旋轉(zhuǎn)。當(dāng)然,沒(méi)有電刷。
在這種情況下,線圈采用Y形接法,使用半導(dǎo)體元件為線圈供給電流,根據(jù)旋轉(zhuǎn)的磁體位置來(lái)控制電流的流入和流出。在該示例中,使用霍爾元件來(lái)檢測(cè)磁體的位置。霍爾元件配置在線圈和線圈之間,根據(jù)磁場(chǎng)強(qiáng)度檢測(cè)產(chǎn)生的電壓并用作位置信息。在前面給出的FDD主軸電機(jī)的圖像中,也可以看到在線圈和線圈之間有用來(lái)檢測(cè)位置的霍爾元件(線圈的上方)。
霍爾元件是眾所周知的磁傳感器。可將磁場(chǎng)的大小轉(zhuǎn)換為電壓的大小,并以正負(fù)來(lái)表示磁場(chǎng)的方向。下面是顯示霍爾效應(yīng)的示意圖。
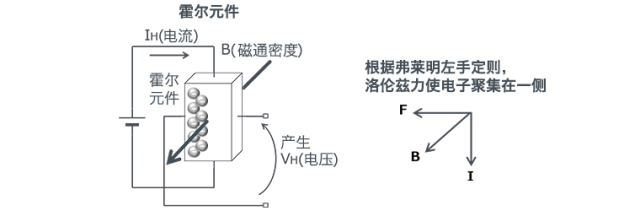
霍爾元件利用了“當(dāng)電流IH流過(guò)半導(dǎo)體并且磁通B與電流成直角穿過(guò)時(shí),會(huì)在垂直于電流和磁場(chǎng)的方向上產(chǎn)生電壓VH”的這種現(xiàn)象,美國(guó)物理學(xué)家Edwin Herbert Hall(埃德溫·赫伯特·霍爾)發(fā)現(xiàn)了這種現(xiàn)象并將其稱為“霍爾效應(yīng)”。產(chǎn)生的電壓VH由下列公式表示。
VH = (KH / d)?IH?B??※KH:霍爾系數(shù),d:磁通穿透面的厚度
如公式所示,電流越大,電壓越高。常利用這個(gè)特性來(lái)檢測(cè)轉(zhuǎn)子(磁體)的位置。
三相全波無(wú)刷電機(jī)的旋轉(zhuǎn)原理
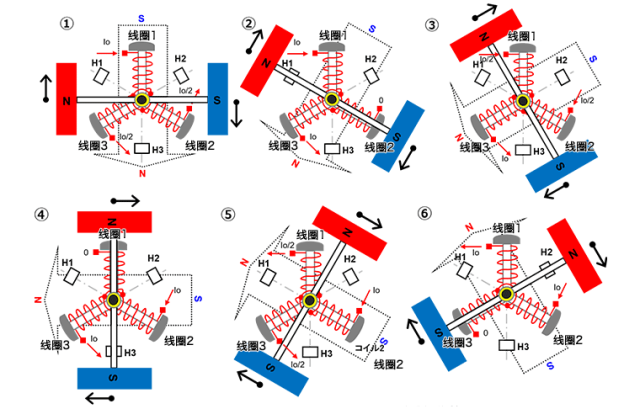
下面將按照步驟①~⑥來(lái)說(shuō)明無(wú)刷電機(jī)的旋轉(zhuǎn)原理。為了易于理解,這里將永磁體從圓形簡(jiǎn)化成了矩形。
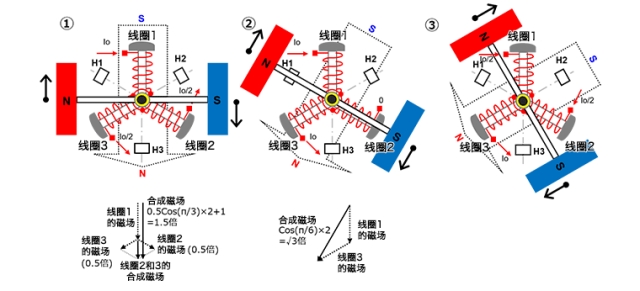
①在三相線圈中,設(shè)線圈1固定在時(shí)鐘的12點(diǎn)鐘方向上,線圈2固定在時(shí)鐘的4點(diǎn)鐘方向上,線圈3固定在時(shí)鐘的8點(diǎn)鐘方向上。設(shè)2極永磁體的N極在左側(cè),S極在右側(cè),并且可以旋轉(zhuǎn)。
使電流Io流入線圈1,以在線圈外側(cè)產(chǎn)生S極磁場(chǎng)。使Io/2電流從線圈2和線圈3流出,以在線圈外側(cè)產(chǎn)生N極磁場(chǎng)。
在對(duì)線圈2和線圈3的磁場(chǎng)進(jìn)行矢量合成時(shí),向下產(chǎn)生N極磁場(chǎng),該磁場(chǎng)是電流Io通過(guò)一個(gè)線圈時(shí)所產(chǎn)生磁場(chǎng)的0.5倍大小,與線圈1的磁場(chǎng)相加變?yōu)?.5倍。這會(huì)產(chǎn)生一個(gè)相對(duì)于永磁體成90°角的合成磁場(chǎng),因此可以產(chǎn)生最大扭矩,永磁體順時(shí)針旋轉(zhuǎn)。
當(dāng)根據(jù)旋轉(zhuǎn)位置減小線圈2的電流并增加線圈3的電流時(shí),合成磁場(chǎng)也順時(shí)針旋轉(zhuǎn),永磁體也繼續(xù)旋轉(zhuǎn)。
②在旋轉(zhuǎn)了30°的狀態(tài)下,電流Io流入線圈1,使線圈2中的電流為零,使電流Io從線圈3流出。
線圈1的外側(cè)變?yōu)镾極,線圈3的外側(cè)變?yōu)镹極。當(dāng)矢量合成時(shí),產(chǎn)生的磁場(chǎng)是電流Io通過(guò)一個(gè)線圈時(shí)所產(chǎn)生磁場(chǎng)的√3(≈1.72)倍。這也會(huì)產(chǎn)生相對(duì)于永磁體的磁場(chǎng)成90°角的合成磁場(chǎng),并順時(shí)針旋轉(zhuǎn)。
當(dāng)根據(jù)旋轉(zhuǎn)位置減小線圈1的流入電流Io、使線圈2的流入電流從零開(kāi)始增加、并使線圈3的流出電流增加到Io時(shí),合成磁場(chǎng)也順時(shí)針旋轉(zhuǎn),永磁體也繼續(xù)旋轉(zhuǎn)。
※假設(shè)各相電流均為正弦波形,則此處的電流值為Io × sin(π?3)=Io × √3?2 通過(guò)磁場(chǎng)的矢量合成,得到總磁場(chǎng)大小為一個(gè)線圈所產(chǎn)生磁場(chǎng)的(√3?2)2×2=1.5 倍。當(dāng)各相電流均為正弦波時(shí),無(wú)論永磁體的位置在哪,矢量合成磁場(chǎng)的大小均為一個(gè)線圈所產(chǎn)生磁場(chǎng)的1.5倍,并且磁場(chǎng)相對(duì)于永磁體的磁場(chǎng)成90°角。
③在繼續(xù)旋轉(zhuǎn)了30°的狀態(tài)下,電流Io/2流入線圈1,電流Io/2流入線圈2,電流Io從線圈3流出。
線圈1的外側(cè)變?yōu)镾極,線圈2的外側(cè)也變?yōu)镾極,線圈3的外側(cè)變?yōu)镹極。當(dāng)矢量合成時(shí),產(chǎn)生的磁場(chǎng)是電流Io流過(guò)一個(gè)線圈時(shí)所產(chǎn)生磁場(chǎng)的1.5倍(與①相同)。這里也會(huì)產(chǎn)生相對(duì)于永磁體的磁場(chǎng)成90°角的合成磁場(chǎng),并順時(shí)針旋轉(zhuǎn)。

④~⑥以①~③相同的方式旋轉(zhuǎn)。
這樣,如果不斷根據(jù)永磁體的位置依次切換流入線圈的電流,則永磁體將沿固定方向旋轉(zhuǎn)。同樣,如果使電流反向流動(dòng)并使合成磁場(chǎng)方向相反,則會(huì)逆時(shí)針旋轉(zhuǎn)。
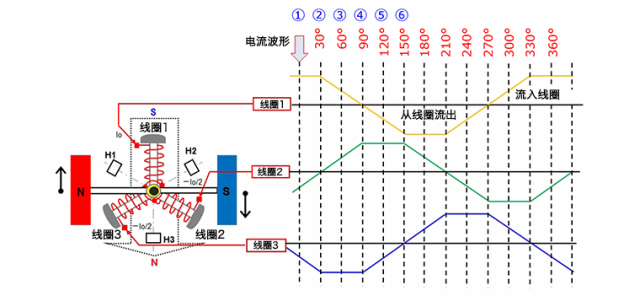
下圖連續(xù)顯示了上述①~⑥每個(gè)步驟的每個(gè)線圈的電流。通過(guò)以上介紹,應(yīng)該可以理解電流變化與旋轉(zhuǎn)之間的關(guān)系了。
關(guān)鍵要點(diǎn):
?三相全波無(wú)刷電機(jī)通過(guò)三個(gè)線圈的電流流入和流出使磁場(chǎng)發(fā)生變化,從而使三相全波無(wú)刷電機(jī)的轉(zhuǎn)子旋轉(zhuǎn)。
三相全波無(wú)刷電機(jī)的位置檢測(cè)
在上一篇“三相全波無(wú)刷電機(jī)的旋轉(zhuǎn)原理”中,介紹了三相全波無(wú)刷電機(jī)通過(guò)三個(gè)線圈中的驅(qū)動(dòng)電流切換實(shí)現(xiàn)旋轉(zhuǎn)的原理。接下來(lái)將介紹三相全波無(wú)刷電機(jī)的驅(qū)動(dòng)方法,但在此之前會(huì)先介紹三相全波無(wú)刷電機(jī)的位置檢測(cè)方法,因?yàn)樵趯?shí)際的三相全波無(wú)刷電機(jī)驅(qū)動(dòng)中,需要檢測(cè)旋轉(zhuǎn)的永磁體的位置。
位置檢測(cè)的方法主要有兩種。一種是使用傳感器的方法,這種方法需要使用霍爾元件的電壓。雖然在上一篇文章中用來(lái)說(shuō)明旋轉(zhuǎn)原理的圖中沒(méi)有直接解釋,但是標(biāo)出了H1、H2和H3霍爾元件(傳感器)。另一種是檢測(cè)各線圈的感應(yīng)電壓的方法,由于這種方法不使用傳感器而被稱為“無(wú)傳感器方法”。
使用霍爾元件的位置檢測(cè)(有傳感器)
使用霍爾元件(傳感器)檢測(cè)旋轉(zhuǎn)的永磁體位置時(shí),將霍爾元件的安裝位置設(shè)置在線圈和線圈之間的中點(diǎn),即1/2角度對(duì)應(yīng)的點(diǎn)(參見(jiàn)右圖)
假設(shè)線圈3與線圈1之間的霍爾元件為H1,線圈1與線圈2之間的霍爾元件為H2,線圈2與線圈3之間的霍爾元件為H3,則順時(shí)針?lè)较蛐D(zhuǎn)的電流波形與霍爾元件的信號(hào)波形對(duì)比如下(中段波形)。
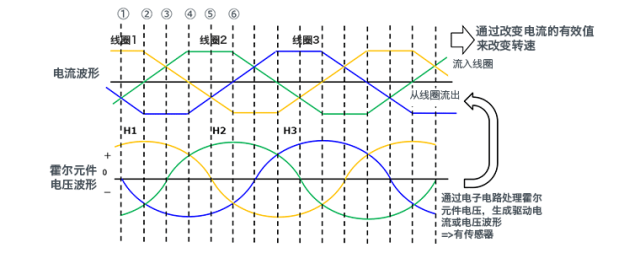
在這個(gè)示例中,當(dāng)對(duì)霍爾元件施加N極磁場(chǎng)時(shí)產(chǎn)生正(+)電壓,當(dāng)施加S極磁場(chǎng)時(shí)產(chǎn)生負(fù)
(-)電壓,并且磁場(chǎng)的強(qiáng)度根據(jù)永磁體的旋轉(zhuǎn)位置以正弦波變化(波形圖下半部分“霍爾元
件電壓波形”)。各相的輸出電流波形為梯形波(波形圖上半部分“電流波形”)。波形圖時(shí)間
軸上的①~⑥的點(diǎn)與上一篇中用來(lái)說(shuō)明“旋轉(zhuǎn)原理”的圖中的①~⑥相對(duì)應(yīng)。該圖也會(huì)在下一節(jié)“使用感應(yīng)電壓進(jìn)行位置檢測(cè)(無(wú)傳感器)”中使用。
驅(qū)動(dòng)時(shí),由根據(jù)轉(zhuǎn)子位置而變化的霍爾元件輸出信號(hào)波形合成輸出電流波形。合成是由H1電壓波形減去H2電壓波形,H2電壓波形減去H3電壓波形,H3電壓波形減去H1電壓波形。通過(guò)這些運(yùn)算,可以獲得相位比H1、H2和H3提前30°的正弦波形(M1、M2、M3)。只要基于這些信號(hào)生成輸出電流,即可創(chuàng)建用于驅(qū)動(dòng)具有所需相位的電機(jī)的電流波形。
要合成用于反轉(zhuǎn)的輸出電流信號(hào)時(shí),需要從H2中減去H1,從H3中減去H2,從H1中減去H3。也就是說(shuō),基于M1=H2-H1、M2=H3-H2、M3=H1-H3,根據(jù)M1、M2和M3的組合波形的相位提供輸出電流,即可實(shí)現(xiàn)反轉(zhuǎn)。
使用感應(yīng)電壓進(jìn)行位置檢測(cè)(無(wú)傳感器)
這是不需要傳感器(霍爾元件)的方法,使用的是線圈中產(chǎn)生的感應(yīng)電壓。在三相全波無(wú)刷電機(jī)中,永磁體相對(duì)于線圈旋轉(zhuǎn),N極和S極交替變化,所以線圈的磁通密度發(fā)生變化,線圈自身發(fā)電并產(chǎn)生感應(yīng)電壓。當(dāng)磁極N在線圈端時(shí),進(jìn)入線圈方向的磁通密度最高;當(dāng)磁極S在線圈端時(shí),從線圈出來(lái)的方向的磁通密度最高。然而,當(dāng)永磁體的磁化波形為正弦波狀時(shí),磁通密度的變化在N極和S極之間的中點(diǎn)處最大。
上圖與上一篇“旋轉(zhuǎn)原理”中使用的圖片相同,三相全波無(wú)刷電機(jī)①~⑥的狀態(tài)對(duì)應(yīng)于下面波形圖中的時(shí)間軸①~⑥。
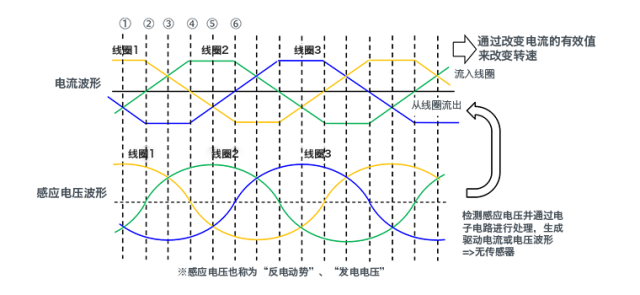
下面對(duì)三相全波無(wú)刷電機(jī)①~⑥的狀態(tài)與感應(yīng)電壓波形之間的關(guān)系進(jìn)行說(shuō)明。
①:線圈1位于S極和N極之間的中點(diǎn),由于S極產(chǎn)生的磁通從線圈外側(cè)出來(lái)的工作變?yōu)镹極產(chǎn)生的磁通進(jìn)入線圈的工作,因此磁通密度的變化最大。所以線圈1的感應(yīng)電壓相對(duì)于線圈中點(diǎn)是正電壓,且最大。
②:由于磁通密度的變化比之前略小,因此線圈1的感應(yīng)電壓降低。
③:由于通往線圈1的磁通密度的變化進(jìn)一步變小,因此感應(yīng)電壓也進(jìn)一步降低。
④:由于N極在線圈端,磁通密度的變化變?yōu)榱悖跃€圈1的感應(yīng)電壓變?yōu)榱恪?/p>
⑤:由于N極逐漸遠(yuǎn)離線圈1,進(jìn)入線圈的磁通量逐漸減少,因此感應(yīng)電壓變?yōu)樨?fù)值,磁通量變化小,故感應(yīng)電壓略有下降。
⑥:由于通往線圈1的磁通密度的變化進(jìn)一步變小,因此感應(yīng)電壓也進(jìn)一步降低。
同樣,線圈2和線圈3在從S極切換到N極的中點(diǎn)產(chǎn)生最高的正感應(yīng)電壓,在從N極切換到S極的中點(diǎn)產(chǎn)生最高的負(fù)感應(yīng)電壓,當(dāng)N極和S極位于線圈端時(shí),感應(yīng)電壓變?yōu)榱恪?br />
另外,如波形圖所示,各線圈的感應(yīng)電壓波形與其驅(qū)動(dòng)電流波形的相位相同。
通過(guò)檢測(cè)感應(yīng)電壓的零點(diǎn)并合成輸出電流波形,可以將感應(yīng)電壓用作轉(zhuǎn)子的位置檢測(cè)信號(hào),使電機(jī)旋轉(zhuǎn),因此無(wú)需使用位置檢測(cè)用的霍爾元件即可進(jìn)行控制。
從下一篇開(kāi)始,將會(huì)介紹實(shí)際的驅(qū)動(dòng)方法。
關(guān)鍵要點(diǎn):
?三相全波無(wú)刷電機(jī)的位置檢測(cè)方法有兩種:三相全波無(wú)刷電機(jī)使用霍爾元件的方法和三相全波無(wú)刷電機(jī)不使用霍爾元件而使用電機(jī)線圈的感應(yīng)電壓的方法。
三相全波無(wú)刷電機(jī)的驅(qū)動(dòng):有傳感器、120度激勵(lì)線性電流驅(qū)動(dòng)
從本文開(kāi)始,將介紹三相全波無(wú)刷電機(jī)的驅(qū)動(dòng)。三相全波無(wú)刷電機(jī)通常通過(guò)控制和驅(qū)動(dòng)電路給電機(jī)激勵(lì)來(lái)實(shí)現(xiàn)驅(qū)動(dòng)。三相全波無(wú)刷電機(jī)驅(qū)動(dòng)的激勵(lì)方式有120度激勵(lì)驅(qū)動(dòng)和正弦波激勵(lì)驅(qū)動(dòng)兩種。三相全波無(wú)刷電機(jī)驅(qū)動(dòng)的每種方式都有其優(yōu)缺點(diǎn)。總體上來(lái)看,正弦波驅(qū)動(dòng)在控制精度、效率和噪聲方面具有優(yōu)勢(shì),但缺點(diǎn)是會(huì)增加系統(tǒng)的復(fù)雜性和成本。而120度激勵(lì)驅(qū)動(dòng)雖然在控制精度、效率和噪聲方面不及正弦波驅(qū)動(dòng),但系統(tǒng)更簡(jiǎn)單,在成本方面也更具優(yōu)勢(shì)。后續(xù)將會(huì)詳細(xì)介紹三相全波無(wú)刷電機(jī)驅(qū)動(dòng)的每種激勵(lì)方式,首先來(lái)看有傳感器的120度激勵(lì)線性電流驅(qū)動(dòng)。
三相全波無(wú)刷電機(jī)的驅(qū)動(dòng):有傳感器、120度激勵(lì)線性電流驅(qū)動(dòng)
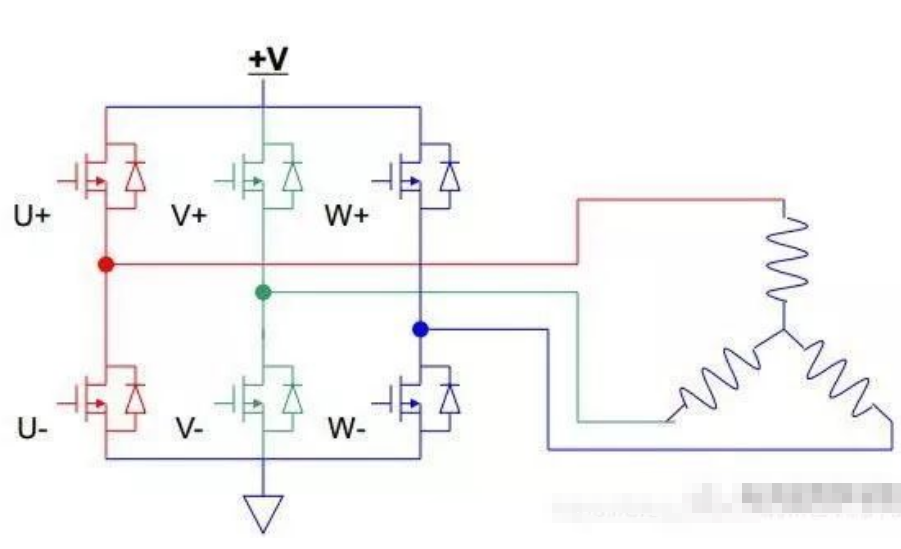
120度激勵(lì)驅(qū)動(dòng)通過(guò)由高邊和低邊開(kāi)關(guān)組成的驅(qū)動(dòng)器所具備的三相控制和驅(qū)動(dòng)電路來(lái)實(shí)現(xiàn)驅(qū)動(dòng)。下面根據(jù)120度激勵(lì)驅(qū)動(dòng)的驅(qū)動(dòng)電路示例和各輸入輸出波形圖對(duì)這種驅(qū)動(dòng)方式進(jìn)行說(shuō)明。
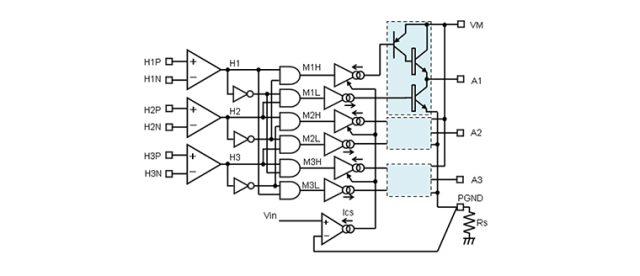
先看各線圈的電流波形。各線圈在各相位差120度的狀態(tài)下,在120度期間導(dǎo)通并使電流流入線圈,在60度期間關(guān)斷,并在120度期間導(dǎo)通使電流流出,再在60度期間關(guān)斷,并重復(fù)這樣的周期循環(huán)(垂直虛線每格增量為30度)。這個(gè)激勵(lì)期間為120度,故被稱為“120度激勵(lì)”。
驅(qū)動(dòng)電路的H1P/H1N~H3P/H3N表示霍爾元件電壓的輸入,以差分方式接收來(lái)自霍爾元件的信號(hào)(參見(jiàn)波形圖“霍爾元件電壓波形”)。
霍爾元件電壓被差分放大器轉(zhuǎn)換為矩形(參見(jiàn)矩形波形H1~H3)。
通過(guò)下一級(jí)的邏輯運(yùn)算,被轉(zhuǎn)換為矩形的波形成為各高邊開(kāi)關(guān)(晶體管)和低邊開(kāi)關(guān)的驅(qū)動(dòng)信號(hào),并通過(guò)電流驅(qū)動(dòng)放大器驅(qū)動(dòng)高邊和低邊開(kāi)關(guān)(參見(jiàn)合成波形M1H/M1L~M3H/M3L、線圈1~3電流波形)。
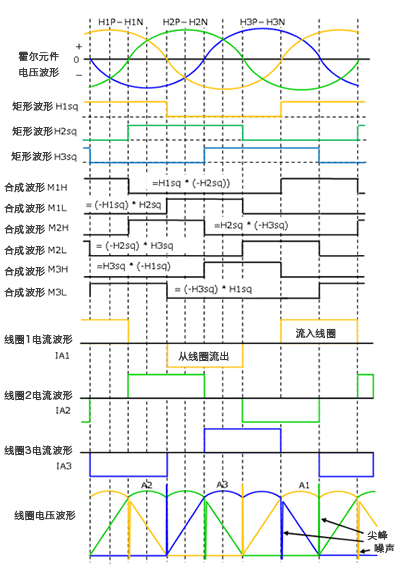
簡(jiǎn)單地講,在線圈電流關(guān)斷的60度期間不會(huì)產(chǎn)生線圈電壓,但實(shí)際上電機(jī)在旋轉(zhuǎn),線圈會(huì)產(chǎn)生感應(yīng)電壓,因此關(guān)斷期間會(huì)產(chǎn)生上升和下降斜坡電壓,在線圈電流會(huì)產(chǎn)生急劇變化的點(diǎn),產(chǎn)生箭頭所示的尖峰噪聲樣電壓。
在下一篇文章中將會(huì)介紹三相全波無(wú)刷電機(jī)的驅(qū)動(dòng)的另一個(gè)激勵(lì)方式:正弦波激勵(lì)驅(qū)動(dòng)。
關(guān)鍵要點(diǎn):
?在三相全波無(wú)刷電機(jī)的驅(qū)動(dòng)的120度激勵(lì)驅(qū)動(dòng)中,是通過(guò)各相位差120度、并反復(fù)進(jìn)行“120度導(dǎo)通(H)、60度關(guān)斷、120度導(dǎo)通(L)、60度關(guān)斷”的循環(huán)來(lái)實(shí)現(xiàn)在三相全波無(wú)刷電機(jī)驅(qū)動(dòng)的。
三相全波無(wú)刷電機(jī)的驅(qū)動(dòng):有傳感器、正弦波激勵(lì)PWM驅(qū)動(dòng)
繼上一篇“三相全波無(wú)刷電機(jī)的120度激勵(lì)線性電流驅(qū)動(dòng)”之后,本文將介紹“三相全波無(wú)刷電機(jī)的正弦波激勵(lì)PWM驅(qū)動(dòng)”。在上一篇文章中也提到過(guò),三相全波無(wú)刷電機(jī)的激勵(lì)方式有120度激勵(lì)驅(qū)動(dòng)和正弦波激勵(lì)驅(qū)動(dòng)兩種。相比120度激勵(lì)驅(qū)動(dòng),三相全波無(wú)刷電機(jī)的正弦波激勵(lì)驅(qū)動(dòng)在控制精度、效率、噪聲等方面更具優(yōu)勢(shì),但在系統(tǒng)的復(fù)雜性和成本方面,三相全波無(wú)刷電機(jī)的矩形波驅(qū)動(dòng)更勝一籌。
三相全波無(wú)刷電機(jī)的驅(qū)動(dòng):有傳感器、正弦波激勵(lì)PWM驅(qū)動(dòng)電路示例
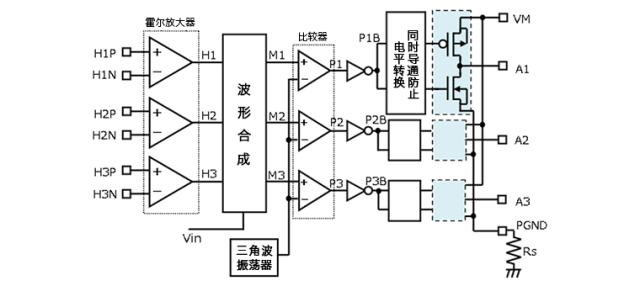
正弦波激勵(lì)驅(qū)動(dòng)通過(guò)由高邊和低邊開(kāi)關(guān)組成的驅(qū)動(dòng)器所具備的三相控制和驅(qū)動(dòng)電路來(lái)實(shí)現(xiàn)驅(qū)動(dòng)。以下是帶有傳感器的正弦波激勵(lì)PWM驅(qū)動(dòng)的電路框圖和各輸入輸出波形圖示例。其基本工作是將來(lái)自三個(gè)霍爾傳感器的信號(hào)輸入至霍爾放大器的輸入端,經(jīng)過(guò)波形合成的信號(hào)通過(guò)比較器和三角波轉(zhuǎn)換為PWM信號(hào),由輸出段MOSFET來(lái)驅(qū)動(dòng)電機(jī)的線圈。A1、A2、A3的PWM信號(hào)的等效電壓為120度相位差的正弦激勵(lì)波形。120度激勵(lì)是120度導(dǎo)通60度關(guān)斷的矩形波激勵(lì)方法,但正弦波驅(qū)動(dòng)則是180度激勵(lì),由于是通過(guò)正弦波對(duì)零到最大值實(shí)施激勵(lì),因此工作更平穩(wěn),噪聲更低。另外,PWM還有助于提高效率。
三相全波無(wú)刷電機(jī)的驅(qū)動(dòng):有傳感器、正弦波激勵(lì)PWM驅(qū)動(dòng)波形示例
下面使用各波形示例進(jìn)行詳細(xì)說(shuō)明,先來(lái)了解正弦波PWM轉(zhuǎn)換。
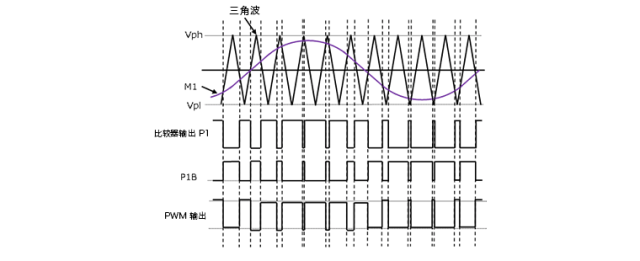
以前面框圖中的H1P/H1N輸入通道為例。霍爾放大器的輸出H1通過(guò)波形合成電路變?yōu)閳D中紫色的正弦波M1。來(lái)自M1和三角波振蕩器的三角波被輸入比較器,作為比較結(jié)果,輸出具有脈沖寬度的矩形波P1(比較器輸出)。P1是通過(guò)電平轉(zhuǎn)換和同時(shí)導(dǎo)通防止電路來(lái)控制輸出段MOSFET的柵極,從而驅(qū)動(dòng)電機(jī)線圈的PWM輸出。這種使用比較器和三角波的PWM轉(zhuǎn)換是很常見(jiàn)的方式,并且是很多電路中使用的方法,比如開(kāi)關(guān)穩(wěn)壓器的PWM生成等。接下來(lái),請(qǐng)看各輸入輸出波形。
霍爾元件電壓的輸入H1P/H1N~H3P/H3N,是以差分方式接收來(lái)自霍爾元件的信號(hào),并輸出H1~H3相位差120度的正弦波(參見(jiàn)波形圖“霍爾元件電壓波形”)。霍爾元件電壓通過(guò)波形合成電路成為M1~M3。此時(shí),以比原始相位超前30度以上的相位生成各波形(參見(jiàn)“合成波形”)。稱為“超前角”的概念將會(huì)另行詳細(xì)介紹。如前所述,M1~M3通過(guò)比較器與三角波進(jìn)行比較并被轉(zhuǎn)換為PWM信號(hào)(參見(jiàn)“比較器波形P1~P3”)。電機(jī)線圈的電壓波形是PWM信號(hào),但波形圖中顯示的是等效電壓波形。可以看出等效電壓波形是正弦波驅(qū)動(dòng)。
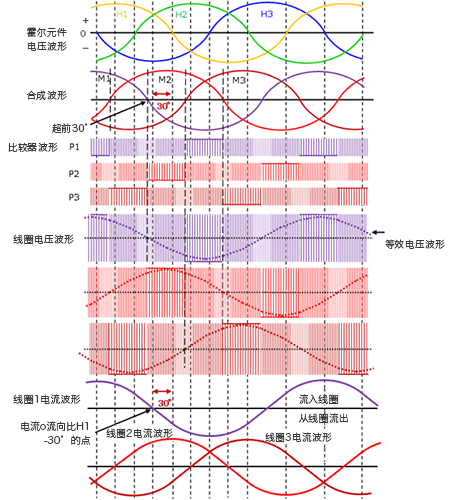
當(dāng)然,線圈電流是正弦波。通過(guò)波形合成電路使相角超前,從而使線圈電流波形的相角總是比霍爾元件電壓(H1~H3)超前30度。這一系列的控制稱為“超前角控制”。120度激勵(lì)時(shí),在線圈電壓波形中看到有線圈電流的ON/OFF引起的尖峰噪聲,但在正弦波激勵(lì)驅(qū)動(dòng)時(shí),由于是180度激勵(lì),沒(méi)有ON/OFF,因此不會(huì)發(fā)生尖峰噪聲。下一篇計(jì)劃介紹超前角控制的相關(guān)內(nèi)容。
關(guān)鍵要點(diǎn):
?三相全波無(wú)刷電機(jī)的正弦波激勵(lì)PWM驅(qū)動(dòng)是各相位差為120度的正弦波驅(qū)動(dòng)。?三相全波無(wú)刷電機(jī)的正弦波激勵(lì)PWM驅(qū)動(dòng)由于不會(huì)像三相全波無(wú)刷電機(jī)的120度激勵(lì)驅(qū)動(dòng)那樣產(chǎn)生尖峰噪聲而在噪聲方面更具優(yōu)勢(shì)。?三相全波無(wú)刷電機(jī)的正弦波驅(qū)動(dòng)通過(guò)PWM驅(qū)動(dòng)實(shí)現(xiàn)高效率。
總結(jié):三相全波無(wú)刷電機(jī)的特征與用途
三相全波無(wú)刷電機(jī)的特征
下表從優(yōu)點(diǎn)和缺點(diǎn)的角度總結(jié)了三相全波無(wú)刷電機(jī)的特征。加粗的部分是尤為重要的要點(diǎn)。
| 優(yōu)點(diǎn) | 缺點(diǎn) |
|
?電氣噪聲和機(jī)械噪聲小 ?可靠性高,壽命長(zhǎng) ?容易提高速度 ?效率高 ?易于小型化和設(shè)計(jì)成各種形狀 ?旋轉(zhuǎn)速度與施加電壓成正比 ?旋轉(zhuǎn)速度與負(fù)載成正比下降 ?啟動(dòng)時(shí)和低速時(shí)的轉(zhuǎn)矩大 ?轉(zhuǎn)矩與電流成正比 ?主要特性呈線性變化,易于控制 |
?轉(zhuǎn)子是永磁體,因此轉(zhuǎn)動(dòng)慣量無(wú)法減小 ?整流功能需要復(fù)雜的電子電路和傳感器,成本更高 ?驅(qū)動(dòng)電路和電機(jī)間需要較多布線 ?容易發(fā)生轉(zhuǎn)矩波動(dòng)(線圈有鐵芯時(shí)) |
三相全波無(wú)刷電機(jī)的用途示例
下表中總結(jié)了三相全波無(wú)刷電機(jī)在典型設(shè)備中的應(yīng)用示例。除此之外還有其他多種用途,這里只是部分示例
| 設(shè)備 | 應(yīng)用示例 |
| HDD | ?主軸:磁盤(pán)的旋轉(zhuǎn)→三相無(wú)傳感器 |
|
電腦/游戲機(jī)用DVD/藍(lán)光驅(qū)動(dòng) 藍(lán)光刻錄機(jī)/播放器 |
?主軸:磁盤(pán)的旋轉(zhuǎn)→三相無(wú)傳感器 |
|
激光打印機(jī)(LBP) PPC |
?進(jìn)紙→三相有傳感器 ?多棱鏡:激光掃描用多面鏡旋轉(zhuǎn)→三相有傳感器、三相無(wú)傳感器 |
| 直流風(fēng)扇 | →雙相半波無(wú)刷、單相全波無(wú)刷、三相無(wú)傳感器 |
| 無(wú)人機(jī) |
?螺旋槳→三相無(wú)傳感器 ?云臺(tái)控制:相機(jī)方向固定→三相無(wú)傳感器 |
| 工具 | ?驅(qū)動(dòng)器、?電鉆、?電鋸等:旋轉(zhuǎn)→三相有傳感器 |
| 家電 |
?空調(diào):壓縮機(jī)、風(fēng)扇(室內(nèi)機(jī)/室外機(jī))、?空氣凈化器 ?吸塵器、冰箱(壓縮機(jī)、風(fēng)扇)等 |
| 汽車電氣/電子設(shè)備 |
?空調(diào):風(fēng)扇、?電池冷卻風(fēng)扇 ?座椅:風(fēng)扇、氣泵等 |
關(guān)鍵要點(diǎn):
?三相全波無(wú)刷電機(jī)最大的優(yōu)點(diǎn)是沒(méi)有電刷,因此電氣噪聲和機(jī)械噪聲很小,可靠性高,壽命長(zhǎng)。
?三相全波無(wú)刷電機(jī)的缺點(diǎn)是整流功能需要復(fù)雜的電子電路和傳感器,成本更高。
審核編輯:湯梓紅
-
線圈
+關(guān)注
關(guān)注
14文章
1844瀏覽量
45176 -
電機(jī)
+關(guān)注
關(guān)注
143文章
9236瀏覽量
148229 -
工作原理
+關(guān)注
關(guān)注
4文章
277瀏覽量
38189 -
無(wú)刷電機(jī)
+關(guān)注
關(guān)注
60文章
873瀏覽量
47023 -
三相無(wú)刷電機(jī)
+關(guān)注
關(guān)注
0文章
37瀏覽量
6533
原文標(biāo)題:關(guān)鍵要點(diǎn):
文章出處:【微信號(hào):電子技術(shù)控,微信公眾號(hào):電子技術(shù)控】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
三相直流無(wú)刷電機(jī)驅(qū)動(dòng)電路圖解
如何對(duì)三相無(wú)刷電機(jī)驅(qū)動(dòng)器進(jìn)行仿真?
三相交流電機(jī)的工作原理是什么
三相直流無(wú)刷電機(jī)驅(qū)動(dòng)板設(shè)計(jì)
三相直流12-24V無(wú)刷電機(jī)驅(qū)動(dòng)方案,三相正弦波電機(jī)24V風(fēng)扇方案
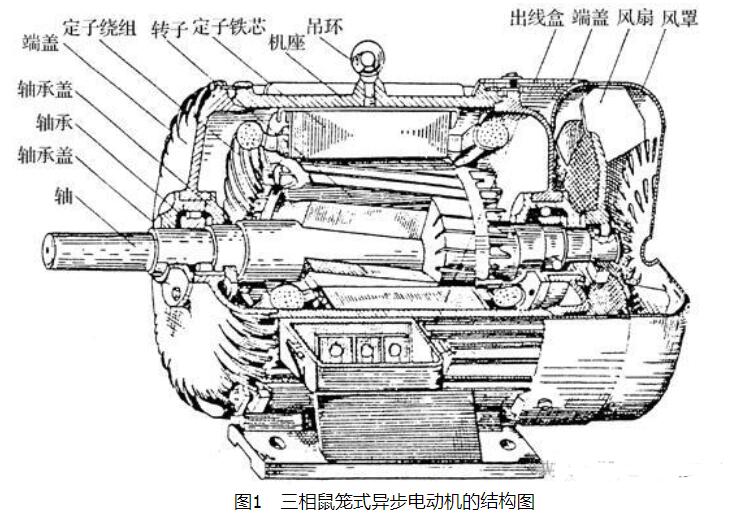
三相鼠籠式電機(jī)工作原理及結(jié)構(gòu)
三相全波無(wú)刷電機(jī)的結(jié)構(gòu)
三相全波無(wú)刷電機(jī)的位置檢測(cè)
三相電機(jī)的工作原理 三相電機(jī)的特點(diǎn)
三相全波無(wú)刷電機(jī)的位置檢測(cè)
三相全波無(wú)刷電機(jī)的正弦波驅(qū)動(dòng)中施加更大電壓的方法
三相電機(jī)的工作原理和特點(diǎn)
MS4931三相無(wú)刷電機(jī)驅(qū)動(dòng)系統(tǒng):全自動(dòng)電刨設(shè)備的應(yīng)用
三相無(wú)刷電機(jī)的工作原理及優(yōu)勢(shì)
MS4931——三相無(wú)刷電機(jī)驅(qū)動(dòng)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論