 圍繞ADAS域控制器的關鍵器件進行簡要分析
圍繞ADAS域控制器的關鍵器件進行簡要分析
佐思汽研對當前國內主流的高算力ADAS域控制器產品和技術信息進行了研究匯總,如華為MDC、大疆ADAS域控樣機等。
本文將圍繞ADAS域控制器的CPU、MCU、存儲、接口等關鍵器件進行簡要分析。
01 CPU
在CPU選型上,各家域控制器為達到NOP/NGP等L2+級高階ADAS功能,均在追求大算力芯片,目前應用較多的是英偉達Xavier和Orin。
英偉達的Xavier和Orin都內置立體雙目硬核加速,可以直接硬線輸出視差圖(Disparity map),還有光流加速模塊,立體雙目的光流效果比單目好很多,對立體雙目企業來說,最核心的軟件資產是立體匹配算法,大部分都是半全局匹配,但要真做的好,需要長時間摸索。
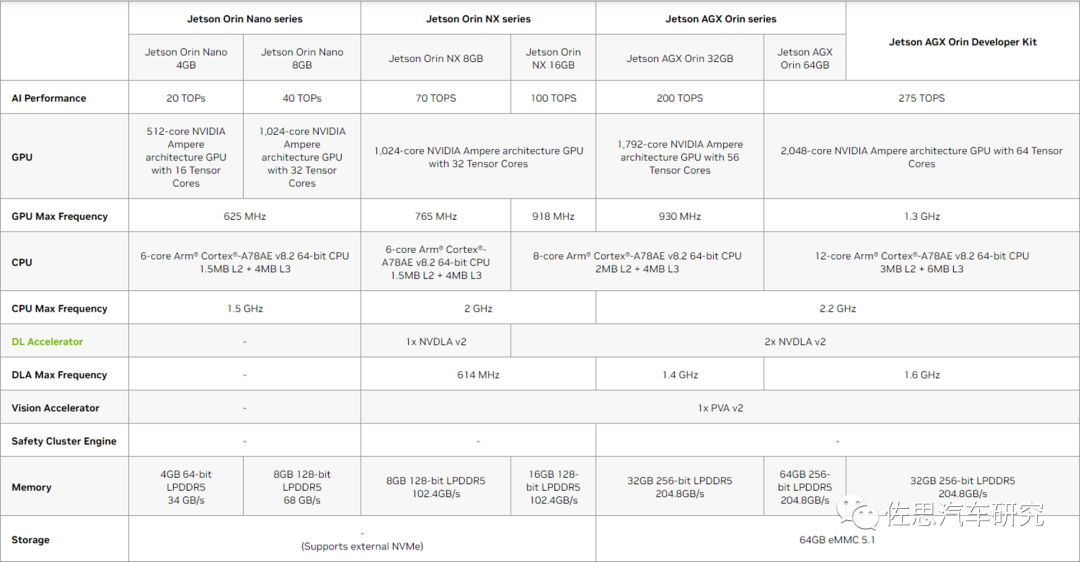
英偉達Orin芯片基本參數,圖片來源:NVIDA官網
深度圖的計算主要是CPU的工作。深度圖之后是自由空間(Freespace)計算,主要由GPU負責。
02
域控制器里的MCU
一般來說,ADAS域控制器用的MCU都是由英飛凌或NXP提供,特別是英飛凌的TC297X/397X系列,市場占有率很高。瑞薩、英飛凌和NXP的主流MCU都達到ASIL-D級標準,如大疆ADAS域控制器工程樣機的MCU采用德州儀器TMS570LC4357,該芯片2014年推出,未通過ASIL認證,只有AEC Q-100認證。
2024年下半年,英飛凌計劃開始量產采用28nm技術工藝的新AURIX TC4xx。AURIX TC4xx系列微控制器主要面向大量數據吞吐類應用,如高級輔助駕駛系統、各個域控制器、新能源和網關系統等。
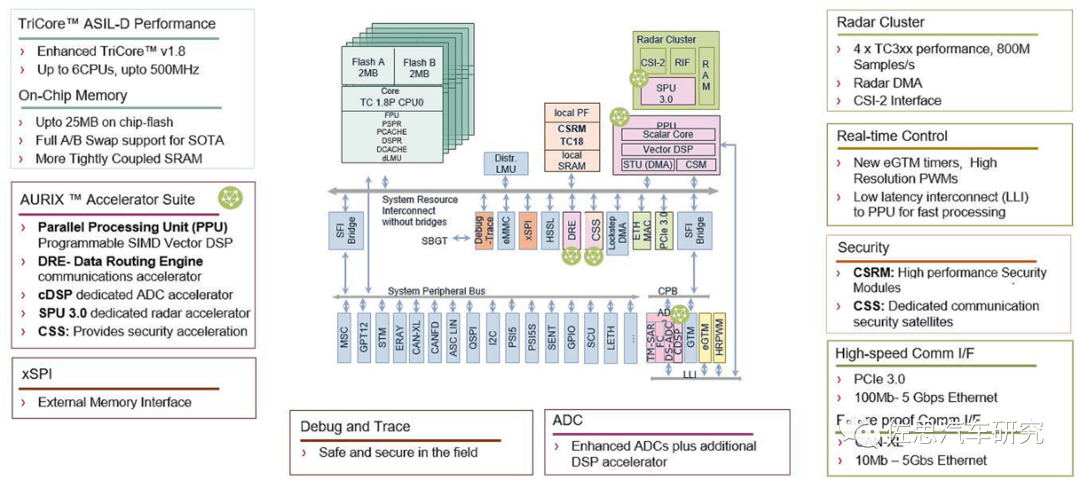
英飛凌TC4xx架構圖,圖片來源:英飛凌官網
MCU非常重要,這是保證域控制器達到ASIL-C/D級認證最重要的一環。
03 接口
ADAS域控制器需要豐富的接口(視頻接口、以太網接口、CAN接口等)來連接各種傳感器設備,如:攝像頭、激光雷達、毫米波雷達、超聲波雷達、組合導航、IMU以及V2X模塊等。
攝像頭接口一般采用GMSL、LVDS、FPDLink等協議,毫米波雷達一般采用CAN/FD通訊,而激光雷達需要上傳大量的數據多采用以太網接口。
在大疆ADAS域控制器載板MCU上方是兩個以太網交換機,即Marvell的88EA6321,左邊是一個硬盤SATA接口,用Marvell的88SE9171芯片將SATA轉換為PCIe接口,絕大部分開發板都不帶SATA接口,一般都用USB接口。88SE9171旁邊還有一個臺灣華邦Winbond的W25Q64JV,這是一個NOR Flash,容量為64Mb,應該是存儲了簡單的硬盤驅動程序。
Marvell第一代車載以太網交換機88EA6321,是7端口以太網千兆性能交換機,充分符合IEEE802.3車載標準,支持AVB(音頻/視頻橋接功能),并支持低能耗以太網,可降低功耗。該款7端口以太網交換機集成了2個IEEE 10/100/1000BASE-T/TX/T端口、2個RGMII/xMII(這2個端口可配置成1個 GMII)端口和1個SGMII/SerDes端口。
該交換機提供遠程管理功能,可輕松連接和配置該設備。它通常是在主處理器和MCU之間的橋梁,也就是英偉達Xavier和德州儀器TMS570LC4357。
88EA6321是Marvell早期產品,目前Marvell的以太網交換器已經演進到第三代,不過Marvell比較先進的產品通常只和大廠合作。88EA6321目標市場是對安全要求不太高的場合,如車身控制器、Infotainment控制器和網關。最高也只支持1G,雖然特斯拉也在用這顆芯片,即使大眾這樣的傳統車廠的新產品不會用如此低帶寬的交換機,目前最先進的設計,最高已經支持10G,也就是千兆以太網,一般也支持到2.5G。
某些點云密度高的激光雷達,峰值速率可能會超過每秒100M,88EA6321不適合接點云密度高的激光雷達(用CAN更不可能了,CAN最高可用的只有0.5M帶寬),而目前主流的毫米波雷達都是CAN或CAN-FD接口,極少數4D毫米波雷達可選以太網輸出,默認一般是CAN-FD。
04 存儲
與消費電子領域相同,車端開始規模化采用LPDDR DRAM、UFS、eMMC等高速存儲器件,以滿足ADAS域控制器的系統、軟件級算法對數據傳輸與存儲需求。目前,主流域控制器存儲組合主要采用“LPDDR+UFS”的形式,與手機端存儲組合一致。
域控用存儲,美光走在了行業前列。其在2021年6月,美光推出首款車用UFS 3.1內存設備產品組合,更具成本/密度優勢。美光UFS 3.1的數據讀取性能是上一代 UFS 2.1的兩倍,連續寫入性能提高了50%,可滿足3級以上ADAS系統和黑匣子應用中不斷增長的傳感器和攝像頭數據對于實時本地存儲的需求。
理想L9 ADAS域控制器,便搭載了美光車規級LPDDR5 DRAM內存和基于3D TLC NAND技術的UFS 3.1存儲芯片。截至目前,美光LPDDR5是業界唯一一款獲得汽車安全完整性等級ASIL-D認證的內存產品。
隨著車輛智能駕駛輔助等級提高,及高速/城市NGP、自動泊車AVP等功能的逐步應用,將進一步帶動車規DRAM容量、帶寬及產品要求。
容量方面,根據美光的數據,L1/2級汽車單車DRAM容量需求約8GB,L3級和L5級則分別提升至16GB和74GB。
帶寬方面,L2級DRAM帶寬一般為25-50GB/s,L3級時帶寬可達200GB/s,L4級之后帶寬將提升至1TB/s。
產品方面,L2級主要采用基礎的DDR2/DDR3,現階段L2開始向L3升級,DRAM也將逐步往DDR4/LPDDR4/LPDDR5/GDDR5切換。
UFS層面,UFS由JEDEC特別定義為e-MMC的高性能存儲器替代品。它已經成為主要的智能手機解決方案,并持續遷移到車載應用和其他應用當中。UFS最終將超越e-MMC,成為主要的車載應用存儲解決方案。
05 解串行
解串行的代表型號是德州儀器的DS90UB960。360全景魚眼鏡頭環視通常由Infotainment完成,環視的有效距離一般都在10米內,不可能做遠距離的ADAS,一般只用來泊車,ADAS域控制器不考慮360環視,再說,一個DS90UB960足以對應4個360環視圖像傳感器。
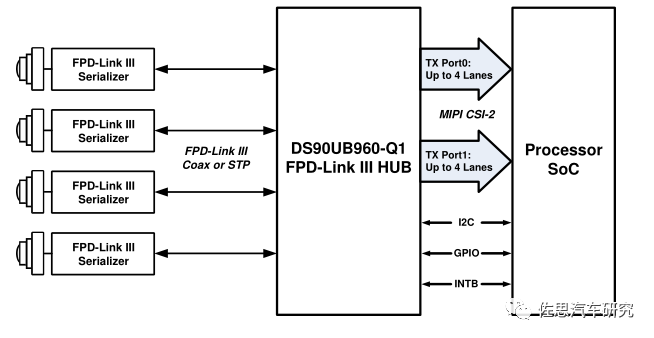
DS90UB960典型應用圖,圖片來源:德州儀器
上圖是德州儀器DS90UB960的典型應用圖,即接4個200萬像素幀率30Hz的YUV444數據,或者4個200萬像素幀率60Hz的YUV420數據,后者可能性更大。
DS90UB954是DS90UB960簡化版,從4Lane減少到2Lane。與之配套的一般是DS90UB953。
推測特斯拉的車內駕駛員狀態監測用這顆芯片,因為攝像頭的LVDS輸出不適合遠距離傳送,基本上攝像頭都要配備一個解串行芯片,將并行數據轉換為串行用同軸或STP傳輸,這樣傳輸距離遠且EMI電磁干擾更容易過車規。
這里需要說明一下攝像頭的數據格式,通常由RAW RGB、YUV兩種。
YUV常見的有三種級YUV444,YUV422和YUV420。
計算帶寬的公式對RAW RGB來說是像素×幀率×比特×4,比如一款攝像頭輸出30Hz,200萬像素,那么帶寬是200萬x30x8x4,即1.92Gbps,這個帶寬太寬了。
YUV444是像素×幀率×比特×3,即1.44Gbps,YUV422是像素×幀率×比特×2,即0.96Gbps,YUV420是像素×幀率×比特×1.5,即0.72Gbps。
ADAS通常對色彩考慮不多,YUV420足夠。除車載外一般多采用YUV422。
審核編輯:劉清
-
NGP
+關注
關注
0文章
12瀏覽量
6675 -
ADAS技術
+關注
關注
0文章
21瀏覽量
3259 -
MCU芯片
+關注
關注
3文章
250瀏覽量
11437 -
域控制器
+關注
關注
0文章
248瀏覽量
2638
原文標題:ADAS域控制器需要哪些芯片?
文章出處:【微信號:芯世相新能源,微信公眾號:芯世相新能源】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
數明半導體參與起草車身域控制器測試方法團體標準
區域控制器電源負載的智能調度

經緯恒潤全棧底盤域控制器成功量產,開啟智能出行新篇章


Arm Cortex-R82AE賦能高性能區域控制器設計

榮威RX5智能駕駛域控制器方案

汽車區域控制器架構趨勢下,這三類的典型電路設計正在改變

汽車區域控制器架構趨勢下的SmartFET應用
淺析ADAS域控制器技術
座艙域控制器硬件架構方案:SoC + MCU
智駕、座艙、泊車三合一域控制器解析

關于域控制器的基礎知識分享
上汽飛凡R7智聯域控制器模塊TBOX的拆解分析






 工商網監
工商網監
評論