 一種用于視覺定位的2D-3D匹配方法GAM
一種用于視覺定位的2D-3D匹配方法GAM
主要內容:
提出了一種新的2D-3D匹配方法,幾何輔助匹配(GAM),使用外觀信息和幾何上下文來改進2D-3D特征匹配,可以在保持高精度的同時增強2D-3D匹配的recall,將GAM插入到分層視覺定位pipeline中,表明GAM可以有效地提高定位的魯棒性和準確性,其實驗表明,GAM可以找到比手工啟發式和學習的方法更正確的匹配,在多個視覺定位數據集上獲得了最先進的結果。
Contributions:
提出了GAM,首先根據視覺外觀為每個2D點建立多個候選匹配,然后根據幾何上下文過濾不正確的匹配。
提出了一種稱為BMNet的深度神經網絡來處理多對多候選匹配,它可以預測每個2D-3D匹配的幾何先驗并輸出全局最優匹配集。
提出了一種具有新場景檢索策略的分層視覺定位方法,進一步提高了姿態估計的魯棒性。
所提出的定位方法在多個數據集上優于最先進的方法。
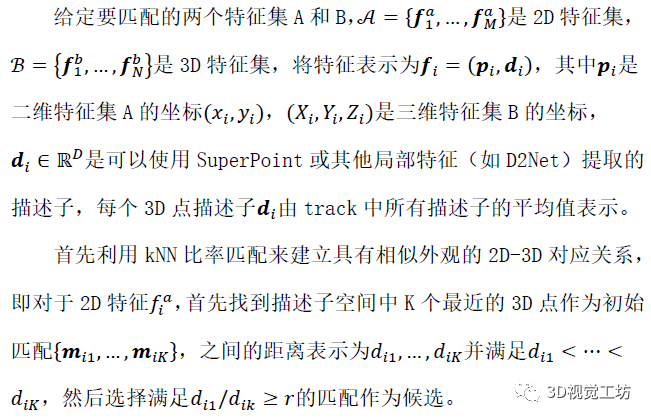
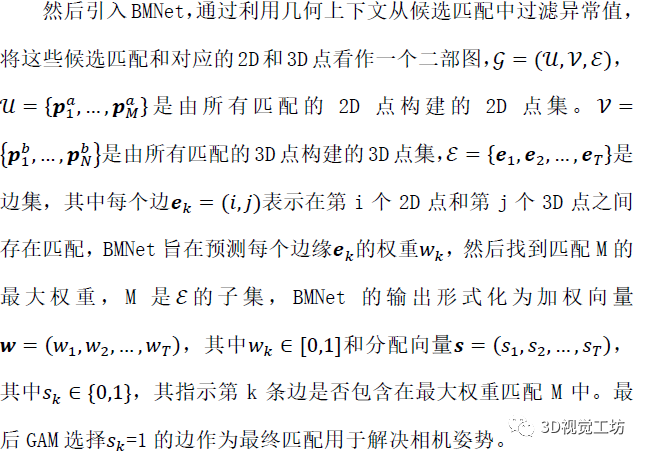
幾何輔助匹配:
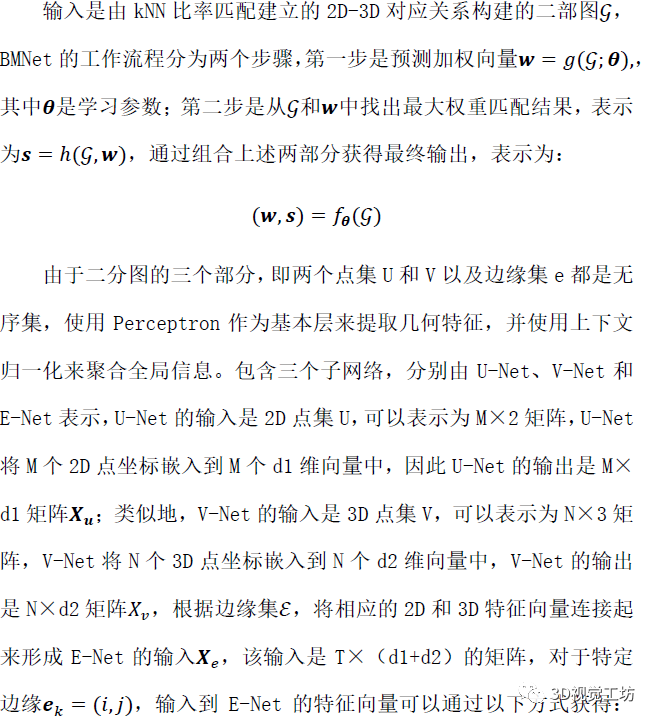
網絡架構: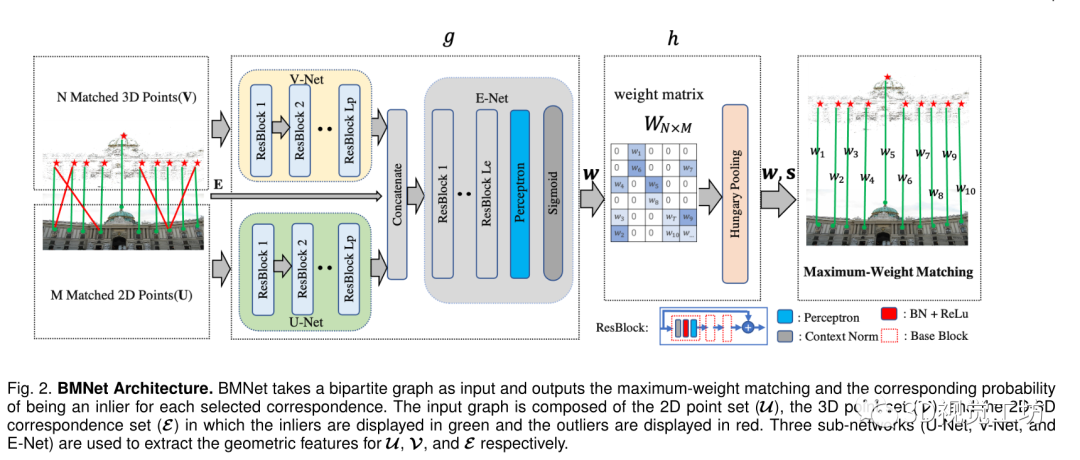
Hungarian Pooling:
如果直接訓練g(g;θ),網絡參數將很難學習,因為幾何一致性可能與監督沖突,如下圖所示。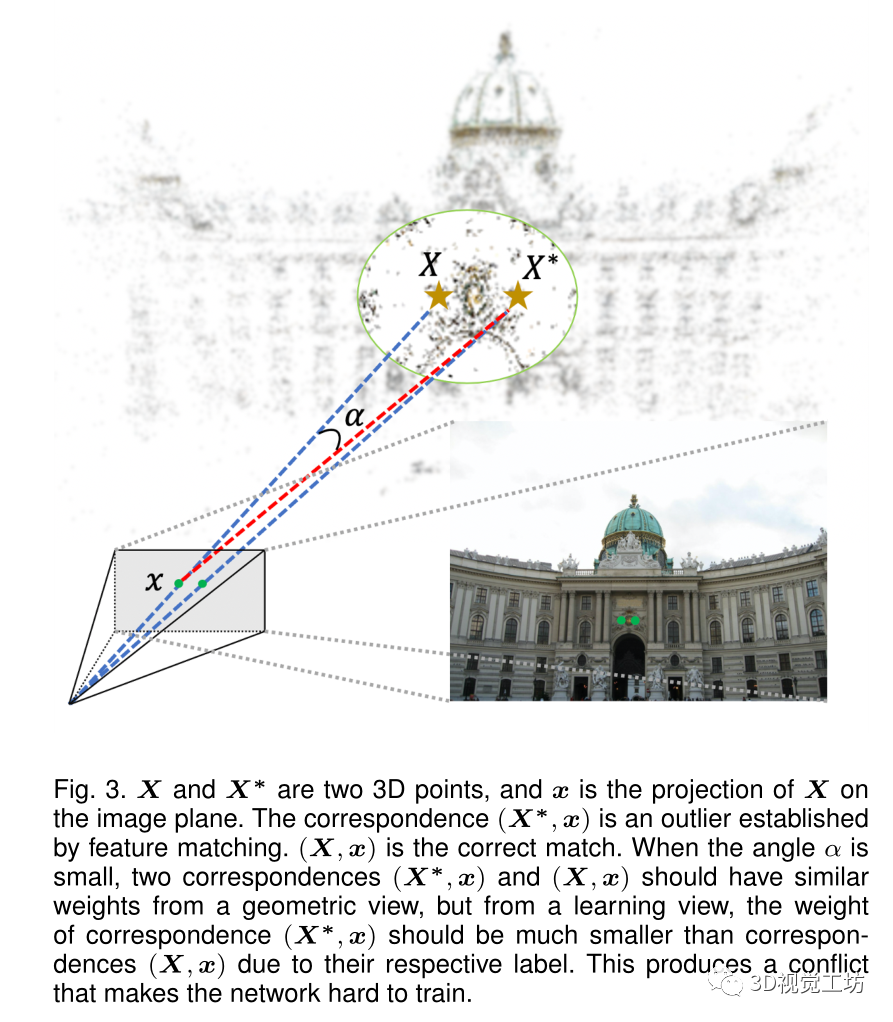
2D圖像點與在3D空間中接近的兩個3D點匹配,在相同的相機姿勢下,它們可能都有小的重投影誤差,網絡易于根據提取的幾何特征為它們生成相似的權重,這兩種對應關系都被認為是幾何一致的。
然而其中只有一個是inlier,其余的則是outlier,多個對應具有相似的幾何特征但具有不同標簽的這種差異使得網絡難以收斂。
為了解決這個問題,將匈牙利算法引入到網絡中進行端到端訓練。匈牙利算法可以找到全局最優的一對一匹配,因為只選擇了兩個對應關系中的一個,所以可以消除幾何一致性和監督之間的差異。
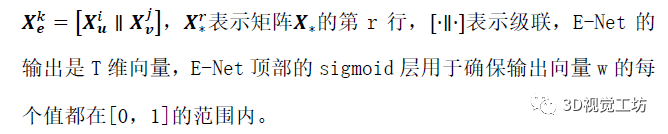
基于由g(g;θ)預測的權重向量w和二分圖g,權重矩陣w被構造為:

其中W的未填充元素被設置為0,然后將匈牙利算法應用于該權重矩陣W獲得匹配M的最大權重。分配向量s由下列公式獲得:

由于輸出邊緣來自輸入邊緣的子集,引入匈牙利算法的層可以被視為一個特殊的采樣層,稱之為匈牙利池,端到端訓練中使用的反向傳播公式如下:

分層定位pipeline: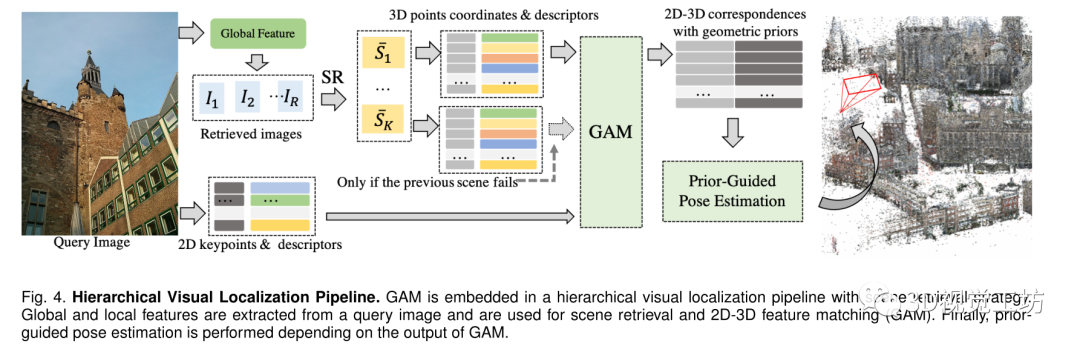
對于查詢圖像,提取其全局特征和局部特征,全局特征用于粗略定位以確定要匹配的3D點集,提取的局部特征和結合相應描述符的3D點集都被送到GAM中以獲得全局最優2D-3D對應。
整個定位過程分為三個模塊,即場景檢索、2D-3D特征匹配和先驗引導姿態估計。
場景檢索:

2D-3D特征匹配:
根據場景檢索的順序執行GAM并輸出匹配的2D-3D對應,對于第k個場景 ,獲取其3D點和相應的描述子來構建3D特征集,在從查詢圖像提取的2D局部特征和3D特征之間執行GAM,輸出匹配M的最大權重,根據歐氏距離執行kNN比率匹配,當描述子被歸一化時,這可以通過矩陣運算有效地實現。
,獲取其3D點和相應的描述子來構建3D特征集,在從查詢圖像提取的2D局部特征和3D特征之間執行GAM,輸出匹配M的最大權重,根據歐氏距離執行kNN比率匹配,當描述子被歸一化時,這可以通過矩陣運算有效地實現。
先驗引導的姿態估計:
由于M中仍然存在一些錯誤匹配,在RANSAC循環中應用PnP解算器,在RANSAC loop中,采樣2D-3D對應的概率由BMNet預測的似然決定,這使得能夠以更大的機會對可能的inlier進行采樣。
實驗:
首先進行了2D-3D匹配實驗,表明GAM以比手工制作的方法和學習方法更高的精度找到更多的真實匹配。
數據集:MegaDepth數據集中選擇一個位置作為2D-3D匹配評估的測試數據集。
將GAM與傳統手工制作方法和學習匹配方法進行了比較 使用最近鄰(NN)匹配器從描述符空間中的每個2D點的所有3D點中找到最近鄰,手工制作的異常值剔除方法包括比率測試(ratio)、距離閾值(distance)和彼此最近的鄰居(cross check),因為沒有其他基于學習的方法直接用于2D-3D特征匹配,因此將最近提出的一些在2D-2D匹配中表現良好的方法遷移到2D-3D進行比較,將LGCNet和OANet的輸入從2D-2D對應替換為2D3D對應,即LGCNet-2D3D和OANet2D3D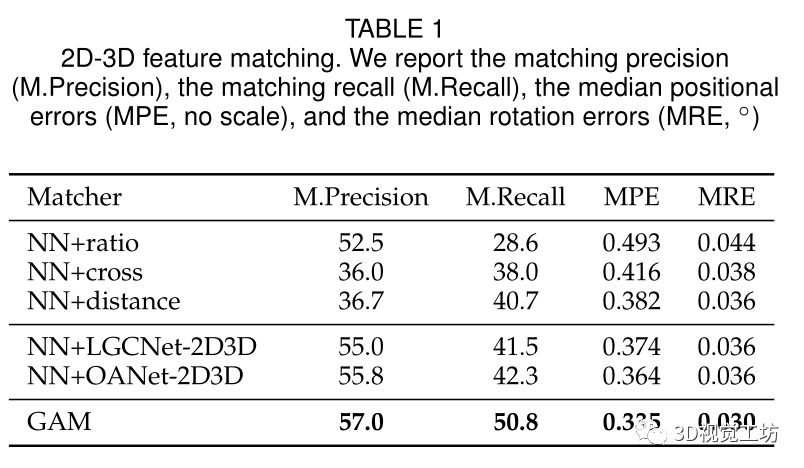
評估GAM在視覺定位方面的有效性以及提出的視覺定位框架: 數據集:Aachen Day-Night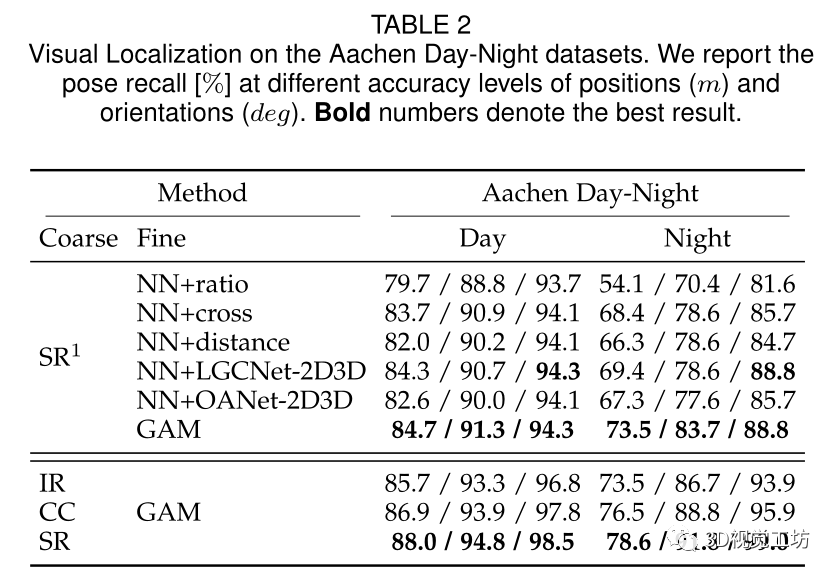
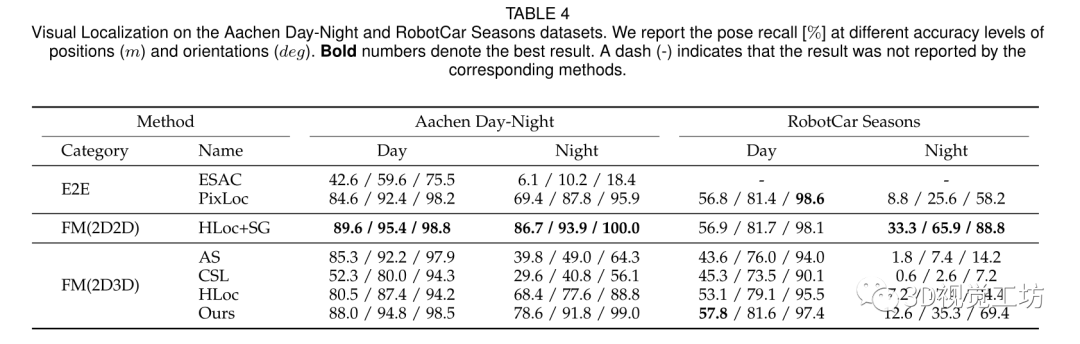
與SOTA定位方法的比較: 數據集:Cambridge Landmarks 和Aachen Day-Night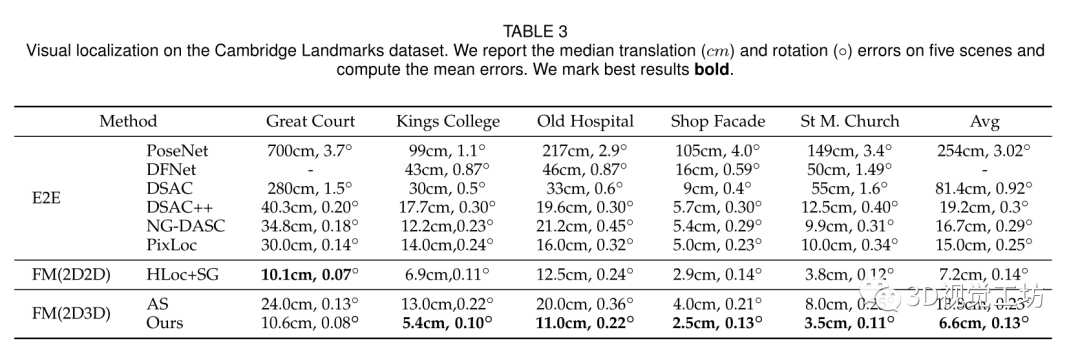
總結:
提出了一種用于視覺定位的2D-3D匹配方法GAM,同時使用外觀信息和幾何上下文來提高匹配性能,在保持高精度的同時提高了2D-3D匹配的召回率,其引入了一種新的二部匹配神經網絡BMNet以提取2D-3D對應的幾何特征,并可以學習全局幾何一致性以預測每個對應的真實匹配的可能性,還將匈牙利算法集成到BMNet中作為一個特殊的池層以端到端的方式找到最大權重匹配,使得定位能夠獲得更正確的匹配從而提高了定位的魯棒性和準確性。
審核編輯:劉清
-
神經網絡
+關注
關注
42文章
4771瀏覽量
100719 -
gam
+關注
關注
0文章
5瀏覽量
7275 -
匹配器
+關注
關注
0文章
6瀏覽量
5725
原文標題:用幾何信息來輔助基于特征的視覺定位(arxiv 2022)
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
一種降低VIO/VSLAM系統漂移的新方法

一種將NeRFs應用于視覺定位任務的新方法


3D視覺引導的多SKU紙箱拆解
蘇州吳中區多色PCB板元器件3D視覺檢測技術

英倫科技的15.6寸2D-3D可切換光場裸眼3D顯示屏有哪些特點?

激光焊接視覺定位引導方法
有了2D NAND,為什么要升級到3D呢?

Nullmax提出多相機3D目標檢測新方法QAF2D

工業自動化,3D視覺在五金件上下料中的應用

一種用于2D/3D圖像處理算法的指令集架構以及對應的算法部署方法
兩種應用于3D對象檢測的點云深度學習方法






 工商網監
工商網監
評論