") STM32入門學(xué)習(xí)筆記之PWM輸出實(shí)驗(yàn)
STM32入門學(xué)習(xí)筆記之PWM輸出實(shí)驗(yàn)
9.1 PWM簡(jiǎn)介
脈沖寬度調(diào)制(Pulse Width Modulation)技術(shù),簡(jiǎn)稱PWM調(diào)制技術(shù),是一種通過改變脈沖的寬度以及頻率來改變輸出頻率的一種控制方式。采樣控制理論中有一個(gè)重要結(jié)論:沖量相等而形狀不同的窄脈沖加在具有慣性的環(huán)節(jié)上時(shí),其效果基本相同。PWM控制技術(shù)就是以該結(jié)論為理論基礎(chǔ),對(duì)半導(dǎo)體開關(guān)器件的導(dǎo)通和關(guān)斷進(jìn)行控制,使輸出端得到一系列幅值相等而寬度不相等的脈沖,用這些脈沖來代替正弦波或其他所需要的波形。按一定的規(guī)則對(duì)各脈沖的寬度進(jìn)行調(diào)制,既可改變逆變電路輸出電壓的大小,也可改變輸出頻率。
STM32的定時(shí)器除了有計(jì)數(shù),定時(shí),輸入捕獲功能以外,還有PWM輸出功能,主要工作原理就是通過在定時(shí)器內(nèi)部設(shè)置閾值,當(dāng)CNT計(jì)數(shù)器的數(shù)小于這個(gè)閾值的時(shí)候輸出1個(gè)電平,當(dāng)CNT的數(shù)據(jù)大于這個(gè)閾值的時(shí)候輸出另一個(gè)電平。通過改變這個(gè)閾值來改變占空比(因?yàn)镃NT最大計(jì)數(shù)值就是65535),通過改變計(jì)數(shù)頻率來改變PWM脈沖頻率。
9.2 相關(guān)寄存器
9.2.1 捕獲/比較寄存器:TIMx_CCMRx
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| OC2CE | OC2M[2:0] | OC2PE | OC2FE | CC2S[1:0] | OC1CE | OC1M[2:0] | OC1PE | OC1FE | CC1S[1:0] |
OCxCE:輸出比較x清0使能
0:OCxREF不受ETRF輸入的影響
1:一旦檢測(cè)到ETRF輸入高電平,清除OCxREF=0
OCxPE:輸出比較x預(yù)裝載使能
0:禁止預(yù)裝載功能,寫入的數(shù)值立即起作用
1:開啟預(yù)裝載功能,TIMx_CCRx的預(yù)裝載值在更新事件到來時(shí)被加載至當(dāng)前寄存器中
注1 :一旦LOCK級(jí)別設(shè)為3并且CC1S=00則該位不能被修改
注2 :僅在單脈沖模式下,可以在未確認(rèn)預(yù)裝載寄存器情況下使用PWM模式,否則其動(dòng)作不確定
OCxFE:輸出比較x快速使能(該位用于加快CC輸出對(duì)觸發(fā)輸入事件的響應(yīng))
0:根據(jù)計(jì)數(shù)器與CCRx的值,當(dāng)觸發(fā)器的輸入有一個(gè)有效沿時(shí),激活CCx輸出的最小延時(shí)為5個(gè)時(shí)鐘周期
1:OC被設(shè)置為比較電平而與比較結(jié)果無關(guān),觸發(fā)器有效沿和CCx輸出間的延時(shí)被縮短為3個(gè)時(shí)鐘周期
注3 :只在通道被配置成PWM1或PWM2模式時(shí)起作用
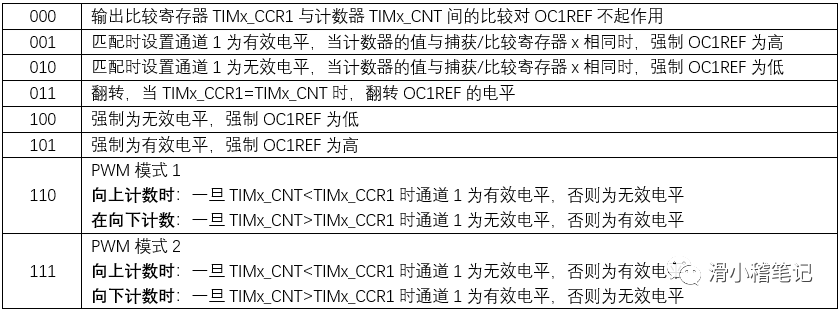
OCxM[2:0]:輸出比較x模式
CCxS[1:0]:捕獲/比較x選擇(用于定義通道x輸入還是輸出)
00:輸出模式
01:輸入模式,映射在TI1上
10:輸入模式,映射在TI2上
11:輸入模式,映射在TRC上,此模式引用于內(nèi)部觸發(fā)器輸入被選中時(shí)
9.2.2 剎車和死區(qū)寄存器:TIMx_BDTR
注:這個(gè)寄存器只有TIM1和TIM8這兩個(gè)高級(jí)定時(shí)器才需要控制。
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MOE | AOE | BKP | BKE | OSSR | OSSI | LOCK[1:0] | DTG[7:0] |
Bit 15:主輸出使能(一旦剎車輸入有效,該位被硬件異步清0)
0:禁止OC和OCN輸出或強(qiáng)制為空閑狀態(tài)
1:如果設(shè)置了相應(yīng)的使能位,則開啟OC和OCN輸出。
Bit 14:自動(dòng)輸出使能
0:MOE只能被軟件置1
1:MOE能被軟件置1或在下一個(gè)更新事件被自動(dòng)置1
** 注1** :一旦LOCK級(jí)別設(shè)為1,則該位不能被修改
Bit 13:剎車輸入極性
0:剎車輸入低電平有效
1:剎車輸入高電平有效
** 注2** :一旦LOCK級(jí)別設(shè)為1,則該位不能被修改
** 注3** :任何對(duì)該位的寫操作都需要一個(gè)APB時(shí)鐘的延遲以后才能起作用
Bit 12:剎車功能使能
0:禁止剎車輸入
1:開啟剎車輸入
**注4** :當(dāng)設(shè)置了LOCK級(jí)別1時(shí),該位不能被修改
**注5** :任何對(duì)該位的寫操作都需要一個(gè)APB時(shí)鐘的延遲以后才能起作用
Bit 11:運(yùn)行模式下“關(guān)閉狀態(tài)”選擇(該位用于當(dāng)MOE=1且通道為互補(bǔ)輸出)
0:當(dāng)定時(shí)器不工作時(shí),禁止OC/OCN輸出(OC/OCN使能輸出信號(hào)=0)
1:當(dāng)定時(shí)器不工作時(shí),一旦CCxE或CCxNE為1,先開啟OC/OCN并輸出無效電平,再置使能輸出信號(hào)為1
注6 :一旦LOCK級(jí)別設(shè)為2,則該位不能被修改
Bit 10:空閑模式下“關(guān)閉狀態(tài)”選擇(該位用于當(dāng)MOE=0且通道設(shè)為輸出時(shí))
0:當(dāng)定時(shí)器不工作時(shí),禁止OC/OCN輸出(OC/OCN使能輸出信號(hào)=0)
1:當(dāng)定時(shí)器不工作時(shí),一旦CCxE或CCxNE為1, OC/OCN先輸出其空閑電平,然后使能輸出信號(hào)為1
注7 :一旦LOCK級(jí)別設(shè)為2,則該位不能被修改
Bit 9~Bit 8:鎖定設(shè)置(該位為防止軟件錯(cuò)誤而提供寫保護(hù))
00:鎖定關(guān)閉,寄存器無寫保護(hù)
01:鎖定級(jí)別1,不能寫入TIMx_BDTR寄存器DTG、 BKE、 BKP、 AOE位和TIMx_CR2寄存器OISx/OISxN位
10:鎖定級(jí)別2,不能寫入鎖定級(jí)別1中的各位,也不能寫入CC極性位
11:鎖定級(jí)別3,不能寫入鎖定級(jí)別2中的各位,也不能寫入CC控制位
** 注8** :在系統(tǒng)復(fù)位后,只能寫一次LOCK位,一旦寫入TIMx_BDTR寄存器,則其內(nèi)容凍結(jié)直至復(fù)位
Bit 7~Bit 0:死區(qū)發(fā)生器設(shè)置(定義了插入互補(bǔ)輸出之間的死區(qū)持續(xù)時(shí)間)
9.3 PWM實(shí)驗(yàn)例程
利用STM32的PA8輸出頻率1KHz,占空比為30%,高電平有效的脈沖。
(1)創(chuàng)建基礎(chǔ)工程與pwm.c和pwm.h文件,并將pwm.c和pwm.h文件添加進(jìn)工程。

(2)pwm.h添加代碼如下。

(3)pwm.c添加代碼如下。
#include "pwm.h"
/***************************************************
Name :PWM_Init
Function :PWM輸出初始化
Paramater :
psc:預(yù)分頻系數(shù)
Return :None
***************************************************/
void PWM_Init( u16 psc )
{
RCC->APB2ENR |= 1<<2 ;
GPIOA->CRH &= 0xFFFFFFF0 ; //清除PA8配置
GPIOA->CRH |= 0x0000000B ; //PA8復(fù)用功能輸出
RCC->APB2ENR |= 1<<11 ; //TIM1時(shí)鐘開啟
TIM1->ARR = 100 ;
TIM1->PSC = psc ;
TIM1->CCMR1 |= 7<<4 ; //CH1 PWM2模式
TIM1->CCMR1 |= 1<<3 ; //CH1預(yù)裝載使能
TIM1->CCER |= 1<<1 ; //OC1低電平有效
TIM1->CCER |= 1<<0 ; //OC1輸出使能
TIM1->BDTR |= 1<<15 ; //MOE輸出使能
TIM1->CR1 |= 1<<7 ; //自動(dòng)重裝載使能
TIM1->CR1 |= 1<<0 ; //開啟定時(shí)器1
}
/***************************************************
Name :PWM_Set
Function :PWM設(shè)置
Paramater :
pwm_data:占空比
Return :None
***************************************************/
void PWM_Set( u8 pwm_data )
{
TIM1->CCR1 = pwm_data ;
}
(4)1.c添加代碼如下。
#include "sys.h"
#include "delay.h"
#include "usart1.h"
#include "pwm.h"
int main()
{
STM32_Clock_Init( 9 ) ; //STM32時(shí)鐘初始化
SysTick_Init( 72 ) ; //SysTick初始化
USART1_Init( 72, 115200 ) ; //初始化串口1波特率115200
PWM_Init( 719 ) ; //PWM初始化
PWM_Set( 30 ) ; //設(shè)置占空比30%
while( 1 )
{
}
}
9.4 擴(kuò)展:PWM實(shí)現(xiàn)DAC輸出
9.4.1 工作原理
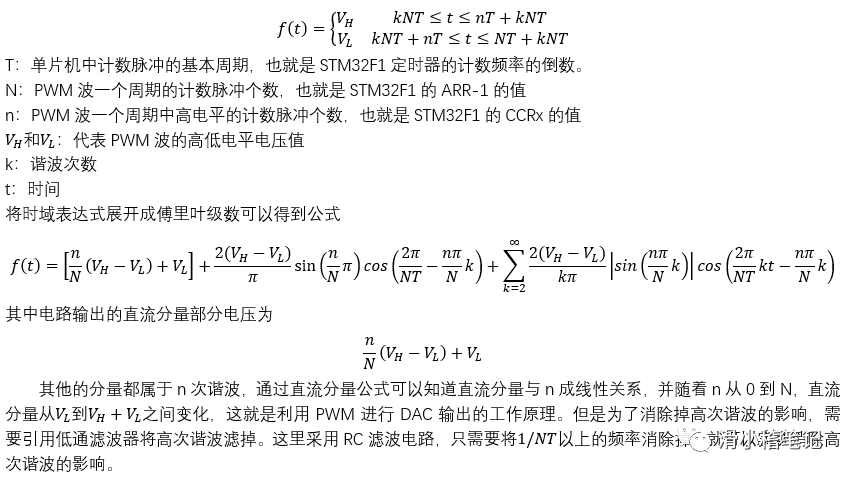
由于STM32F1自帶2路DAC輸出,所以當(dāng)DAC不夠用的時(shí)候,為了節(jié)約成本,需要利用PWM配合RC濾波器來實(shí)現(xiàn)DAC輸出,對(duì)于PWM脈沖的波形可以列寫出脈沖的時(shí)域函數(shù)表達(dá)式
9.4.2 電路設(shè)計(jì)
我們現(xiàn)在設(shè)計(jì)一個(gè)分辨率為8位的PWM信號(hào),其實(shí)STM32的分辨率都可以達(dá)到16位,甚至32位,但是分辨率越高,速度就越慢,在8位分辨率條件下,我們要求1次諧波對(duì)輸出電壓的影響不要超過1個(gè)位的精度,也就是3.3/256=0.01289V。假設(shè)V~H~為3.3V,V~L~為0V,那么一次諧波的最大值是2*3.3/π=2.1V,這就要求我們的RC濾波電路提供至少-20lg(2.1/0.01289)=-44dB的衰減。
STM32的定時(shí)器最快的計(jì)數(shù)頻率是72Mhz,8為分辨率的時(shí)候,PWM頻率為72M/256=281.25Khz。如果是1階RC濾波,則要求截止頻率為1.77Khz,如果為2階RC濾波,則要求截止頻率為22.34Khz。

上圖所示位二階RC濾波器的電路原理,根據(jù)二階RC濾波器的截止頻率計(jì)算公式

可以得到R28C37=R29C38=RC,通過這個(gè)公式我們選定的R和C的參數(shù),并得到實(shí)際的截止頻率為33.8KHz,遠(yuǎn)超過理論的截止頻率,該電路實(shí)測(cè)精度大約在0.5LSB左右。
9.4.3 實(shí)驗(yàn)例程
在這里,我們只需要將實(shí)驗(yàn)例程中的PWM頻率改為22.34KHz即可。通過改變占空比,我們可以用電壓表來測(cè)量出實(shí)際的輸出電壓。
PS:PWM實(shí)現(xiàn)DAC輸出最常見的功能就是語音合成芯片。
-
單片機(jī)
+關(guān)注
關(guān)注
6037文章
44568瀏覽量
636059 -
PWM
+關(guān)注
關(guān)注
114文章
5191瀏覽量
214156
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
STM32單片機(jī)學(xué)習(xí)筆記(6):PWM波形產(chǎn)生
STM32學(xué)習(xí)筆記(初學(xué)者快速入門)
STM32學(xué)習(xí)筆記(初學(xué)者快速入門)
CubeMX入門STM32 HAL庫的學(xué)習(xí)筆記
STM32入門學(xué)習(xí)筆記 精選資料分享
ALIENTEK_MINISTM32_實(shí)驗(yàn)8_PWM輸出實(shí)驗(yàn)
PWM輸出實(shí)驗(yàn)_標(biāo)準(zhǔn)例程
STM32各模塊學(xué)習(xí)筆記
STM32單片機(jī)PWM輸出學(xué)習(xí)

STM32學(xué)習(xí)心得二十七:PWM DAC數(shù)模轉(zhuǎn)換實(shí)驗(yàn)及PWM知識(shí)復(fù)習(xí)
STM32學(xué)習(xí)筆記1——軟硬件基礎(chǔ)之keil5編程與GPIO開發(fā)
STM32PWM與示波器實(shí)驗(yàn)
實(shí)驗(yàn)4——STM32的PWM和DAC練習(xí)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論