 用Arduino和距離傳感器制作小雞賽車!(第3篇?最終篇)
用Arduino和距離傳感器制作小雞賽車!(第3篇?最終篇)
該項目旨在介紹用Arduino讓傳感器工作的一個電子作品。此次的分享嘉賓是福田和宏先生!他過去曾在DevicePlus上連載過“Arduino基礎”等作品。
在第2篇中,我們了解了小雞賽車中使用的電子部件的工作情況以及整個電子電路的制作過程。本文是第3篇,也是本項目的最后一篇,在這里我們將制作殼體和程序,徹底完成小雞賽車。
制作殼體
我決定使用第1篇中提到的“圓形機器人底盤套件”來制作殼體。利用圓形機器人底盤套件中的兩枚金屬板做成兩層,再安裝上電機和車輪,即可輕松完成能行駛的車身了。
但是,對于這次需要安裝兩塊電路板、兩節電池、還有超聲波距離傳感器和微動開關的情況而言,實在是顯得太擁擠了。另外,僅憑圓形機器人底盤套件附帶的前輪用球頭難以直行,而且一旦有點臺階,行進方向還可能會發生偏移。
因此,我決定使用3D打印機自己制作所需部件,以完成殼體制作。我使用的是3D打印機,這種打印機也可以加工板子類的部件,大家也可以試試。
安裝電機和車輪
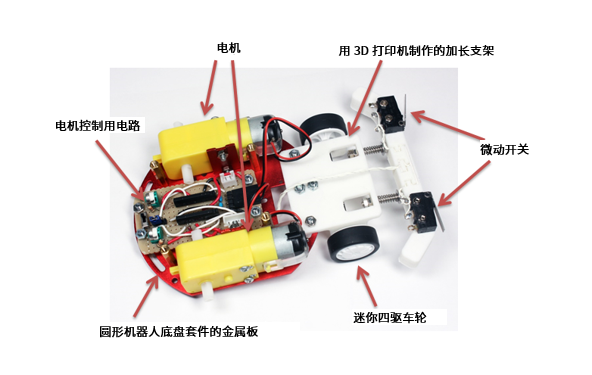
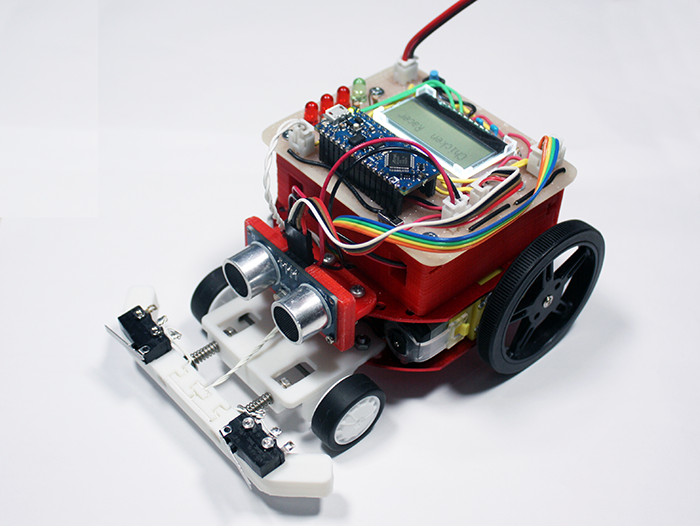
在最底下的一層,除了左右兩個電機外,還需要安裝第2篇中制作的用來控制電機的電路板。另外,我在賽車的前部安裝了自己用3D打印機制作的支架,使之起到加長的作用,以便安裝迷你四驅車輪作為前輪。此外,還在與前方墻壁碰撞的部分安裝了左右兩個微動開關。
安裝超聲波傳感器和電池
在電機上方一層安裝電池。這次,我分別準備了Arduino和電機工作用的電池。兩者都是可提供9V電壓的006P電池。小雞賽車會受到諸如與墻壁碰撞等的沖擊。因此,如果不將電池安裝牢固,就可能會脫落。另外,由于電機的用電量較大,所以很容易耗盡電池電量。為了便于在沒電時更換電池,我用3D打印機做了一個電池盒,這樣就能從背面很方便地更換電池了。
除此之外,還在前方安裝了超聲波傳感器,以測量到墻壁之間的距離。這次使用的超聲波傳感器“HC-SR04”無法測量小于2cm的距離。出于這個原因,超聲波傳感器應安裝在至少離小雞賽車頭部(微動開關被按下的位置)之后2cm的位置。

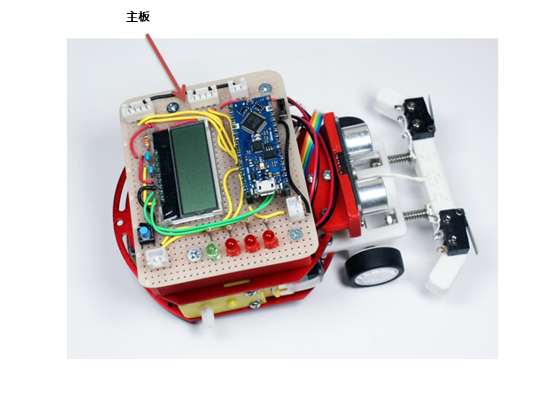
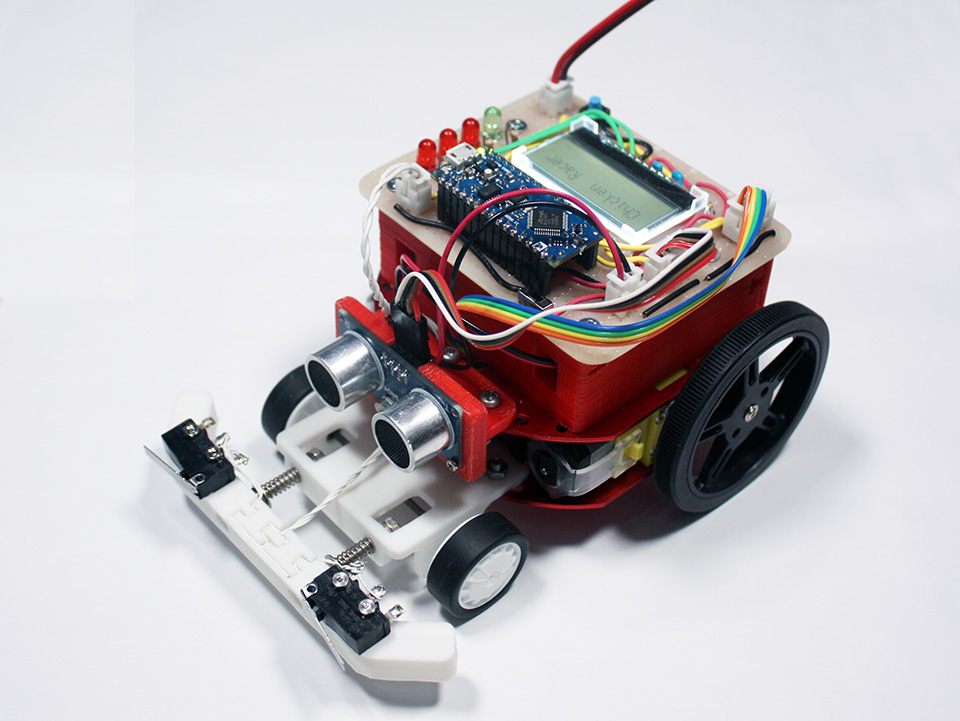
安裝主板
將主板安裝到賽車頂部。我用3D打印機制作了電池盒的頂蓋,這樣,就可以將主板安裝在它上面了。
組裝好車身后,安裝車輪,然后將每個電子部件的導線連接到主板上,就完成了。
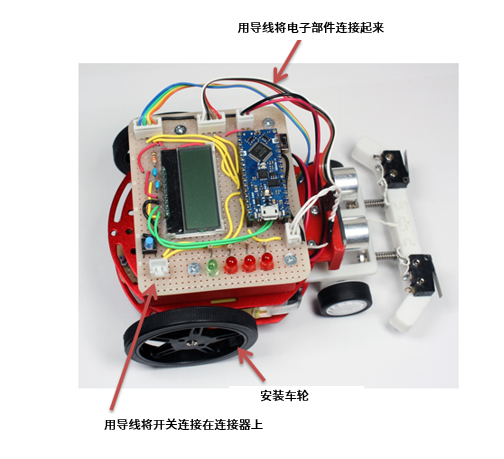
另外,由于控制開關是用導線連接的,因此需要準備幾米左右的導線并將其接到開關上。
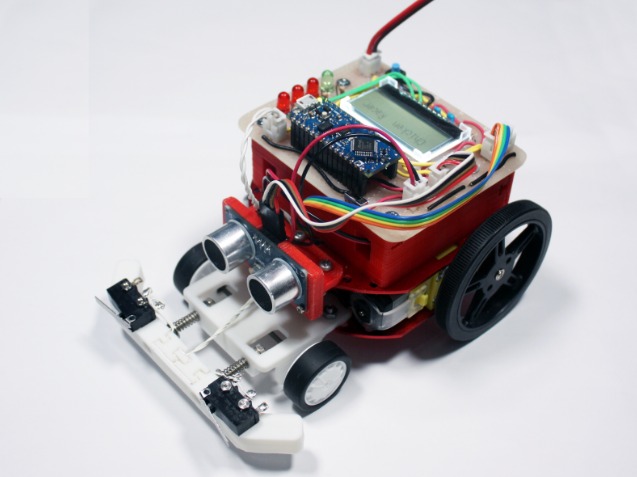
用保險杠吸收沖擊
如果玩家未能在最后一刻將賽車停下來,那么小雞賽車就會撞到墻上。而撞到墻上后,車身就會受到沖擊。特別是如果有像這次這樣的由3D打印機打印的部件時,它們可能會因撞擊而開裂。而且,超聲波距離傳感器也可能會錯位,從而無法準確地測量距離。
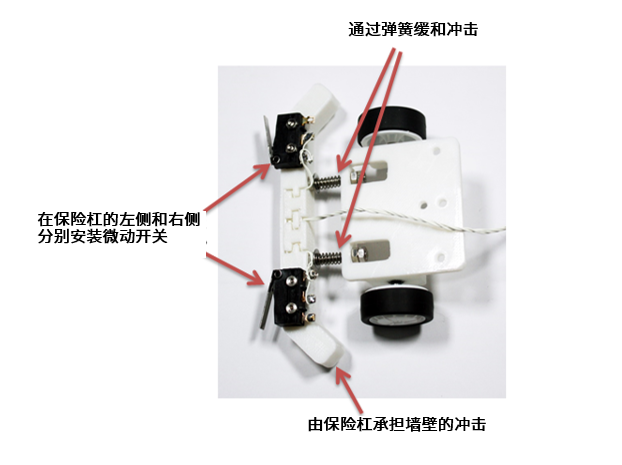
基于這些可能出現的問題,我給小雞賽車安裝了“保險杠”,以緩沖賽車與墻壁碰撞時的沖擊力,防止車身斷裂。保險杠上帶有彈簧,可以吸收撞擊墻壁時的沖擊力,從而避免其影響車身。
這次我使用了通過3D打印機制作的保險杠。另外,在保險杠上面還裝上了兩個微動開關,用來檢測與墻壁的碰撞。安裝位置要確保墻壁碰到保險杠時開關被按下。
當然,如果您打算以低速行駛賽車,即使有碰撞也不會產生多大的沖擊力,那么就不需要安裝保險杠。
創建程序
殼體做好后,我們還需要完成編程工作。程序的主要結構如下:
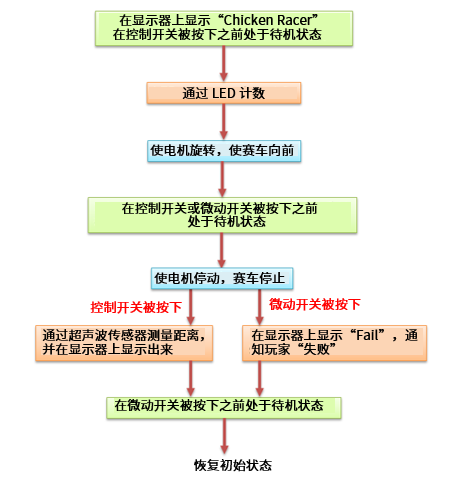
要想實現各個功能,就需把第1篇和第2篇中介紹過的讓每個零部件工作的方法通過編程結合起來。例如,賽車行駛起來之后,判斷控制開關被按下了還是保險杠被撞了的程序如下:
lcddisp.clear(); lcddisp.move( 0x00, 0x00 ); lcddisp.charwrite( " G O ! " ); digitalWrite( MOTOR1_PIN, HIGH ); flag = 0; while( 1 ){ if( digitalRead( BUMPER_PIN ) == LOW ){ flag = 2; break; } if( digitalRead( SW_PIN ) == LOW ){ flag = 1; break; } } digitalWrite( MOTOR1_PIN, LOW );
第1行到第3行,是在液晶顯示器上顯示“GO!”,讓玩家知道即將開始行駛。通過第5行的digitalWrite() 將連接到電機驅動器的引腳設置為“HIGH”,電機旋轉,賽車向前行駛。
通過第8行的while(),一直持續行駛,直到控制開關被按下或保險杠的微動開關被按下。在保持行進過程中,會隨時確認控制開關和微動開關的狀態。
第9行用來判斷保險杠的開關是否被按下,即是否撞到了墻壁。通過digitalRead來確認微動開關所連接的引腳的狀態,若為Low,則判斷微動開關已被按下。通過將flag變量置“2”來記錄撞到了墻壁。通過第11行的“break”退出while循環。
第13行用來判斷控制開關被按下,即玩家按下停止開關。和微動開關的情況一樣,通過確認控制開關所連接的引腳的狀態,當變為“Low”時,判斷開關已被按下。在flag變量中記錄“1”并通過break退出循環。
退出循環后,通過第19行,將電機驅動器所連接的引腳置“Low”,使電機停止運行。
然后,確認flag變量并進行相應的處理。如果為“1”,則判斷“成功”,通過超聲波距離傳感器測量到墻壁的距離,并顯示在液晶顯示器上。如果為“2”,則在液晶顯示器上顯示“Fail …”,表示挑戰失敗。
整個程序可以從以下鏈接下載:
下載程序(chickenracer.zip)
關于其他處理,請參考下載的程序。您可以通過Arduino IDE打開文件,并將程序傳輸到Arduino Nano,即可用于小雞賽車。
還配備了距離校準功能
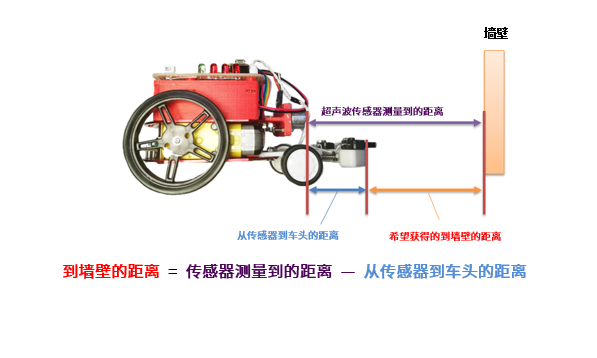
在測量到墻壁之間的距離時,需要使撞墻狀態下的距離為“0cm”。這個可以通過從超聲波距離傳感器測得的距離中減去超聲波傳感器和微動開關之間的距離來計算。例如,超聲波距離傳感器和微動開關之間的距離是3.5cm,測得的距離是5.1cm,那么到墻壁的距離可以計算得出“1.6cm”。
但是,在使用過程中,安裝位置可能會發生偏移,超聲波距離傳感器和微動開關之間的距離可能會發生變化。這樣的話,即使撞墻,也不會是0cm,成功時測得的距離甚至可能會顯示為負數。
在這種情況下,需要每次在程序中改寫計算公式并將其傳輸到Arduino,這需要花費大量的時間和精力。因此,我決定安裝一個可以輕松調整距離校準值的功能。
要進行校正,請確保小雞賽車處于撞墻狀態(微動開關被按下的狀態),然后按下位于液晶顯示器右下方的距離校準開關。接著,測量到墻壁的距離,通過從實際測量值中減去該值,即可得到正確的距離。
讓小雞賽車跑起來
現在,讓我們試試做好的小雞賽車能不能跑起來。打開電源開關后,液晶顯示器將顯示“Chicken Racer”。想玩賽車比賽游戲時,請按下有線連接的控制開關。然后,LED將開始倒計時。
當倒計時LED變為綠燈時,小雞賽車開始向前行駛。在快要撞上墻壁之前,按下控制開關,讓小雞賽車停下來。
如果您可以在不撞墻的情況下停下來,液晶顯示器上將會顯示出與墻壁之間的距離。如果失敗,則會顯示“Fail …”,讓您知道失敗了。如果在游戲結束后按下保險杠上的微動開關,就會被重置,您可以重新開始游戲。
到這里,小雞賽車就大功告成了。本系列連載文章中介紹的電子部件的操作方法和制作過程,在創作其他作品時也會用得到,歡迎參考并嘗試使用Arduino挑戰各種電子作品的創作!

福田和宏
作家,居住在日本札幌。喜歡撰寫有關電子創作、電腦、Linux、智能手機等方面的文章。在為“Raspberry Pi Magazine”和“日經Linux”供稿。著有《這本書足夠!Raspberry Pi超簡單入門教程》(SOTECHSHA)、《學習各種電子元器件的控制!Arduino電子創作 實戰教程》(SOTECHSHA)、《Arduino實用入門》(技術評論出版社)等書籍。目前,創辦了“札幌電子工藝部”(https://sapporo-elec.com/),這里匯集了眾多電子創作發燒友,大家使用各自的電子技能創作各種作品。任何人都可以參加,也期待您的加入!
審核編輯黃宇
-
傳感器
+關注
關注
2550文章
51035瀏覽量
753076 -
機器人
+關注
關注
211文章
28380瀏覽量
206916 -
電機
+關注
關注
142文章
9001瀏覽量
145337 -
Arduino
+關注
關注
188文章
6468瀏覽量
186952 -
距離傳感器
+關注
關注
3文章
75瀏覽量
15121
發布評論請先 登錄
相關推薦
使用超聲波傳感器HC SR04和Arduino Uno制作超聲波距離傳感器

使用Labview、Arduino和超聲波傳感器制作距離/測距程序
在最后一刻停下來!用Arduino和距離傳感器制作小雞賽車!(第1篇)
一款用Raspberry Pi和傳感器制作的可穿戴式小型健康管理設備!第四部分?劇終篇
用Raspberry Pi和傳感器制作“可自動營造舒適空間的裝置” 第四部分?劇終篇





 工商網監
工商網監
評論