
介紹
CAN總線是德國BOSCH公司從80年代初為解決現代汽車中眾多的控制與測試儀器之間的數據交換而開發的一種串行數據通信協議,它是一種多主總線,通信介質可以是雙絞線、同軸電纜或光導纖維。通信速率最高可達1Mbps。
1
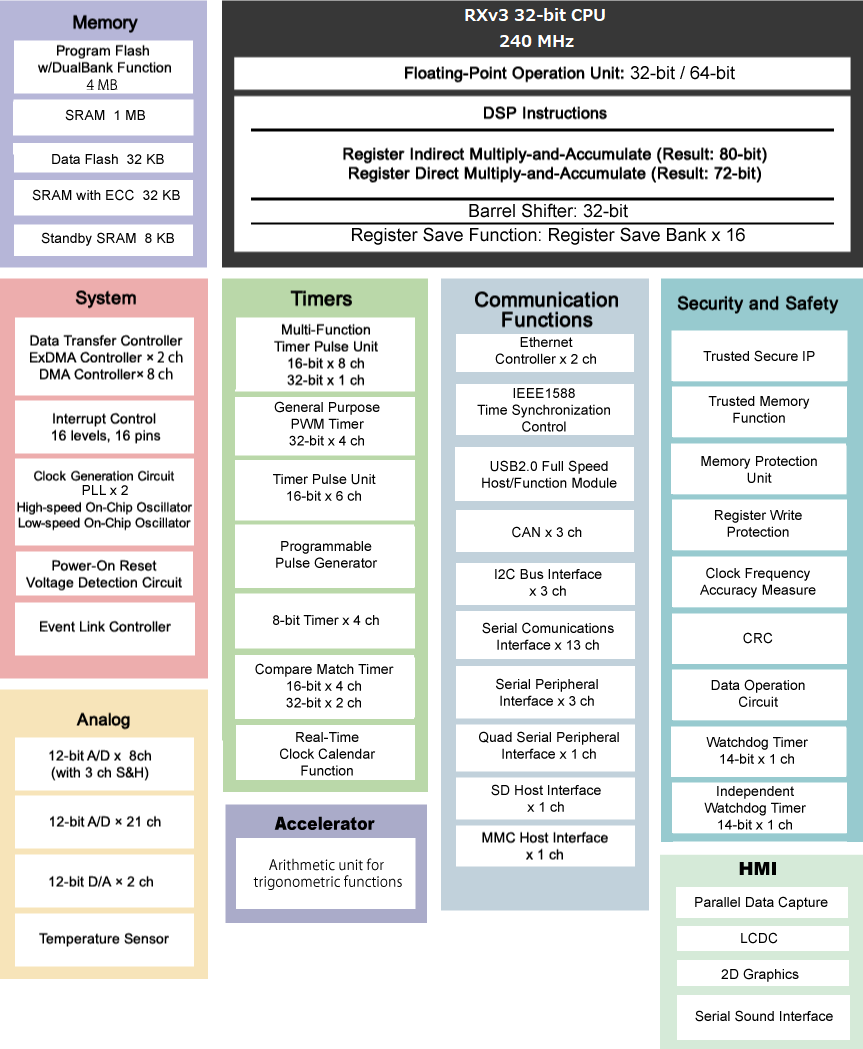
RX72N系列微控制器是一種高性能產品,工作頻率為240MHz,配備了RX第三代RXv3 CPU內核。該產品憑借可在120MHz頻率下讀取數據的4MB閃存、1MB的SRAM和182個通用I/O端口,能夠在單個芯片上實現實時設備控制和網絡功能。它還涵蓋了工業和消費類設備所需的HMI和安全性之類功能,有助于縮小外殼尺寸和縮短開發周期。
#01
RX72N芯片基本參數如下
1
240MHz操作RXv3內核、雙精度FPU、加快中斷響應的存儲器批量保存功能
2
4MB閃存(120MHz讀取訪問、雙庫功能)、1MB SRAM
3
182個通用I/O端口
4
2通道以太網、SD主機I/F、USB 2.0全速、3通道CAN、QSPI
5
三角函數運算器(sin、cos、arctan、hypot)加快了電機的矢量控制
6
TFT LCD控制器、2D繪圖引擎、串行聲音I/F、CMOS相機I/F
7
加密引擎(AES、3DES、RSA、ECC、SHA、TRNG)、密鑰管理、閃存保護功能
8
2.7V至3.6V工作單電源
9
工作環境溫度 -40至85℃/-40至105℃
系統功能框圖
#02
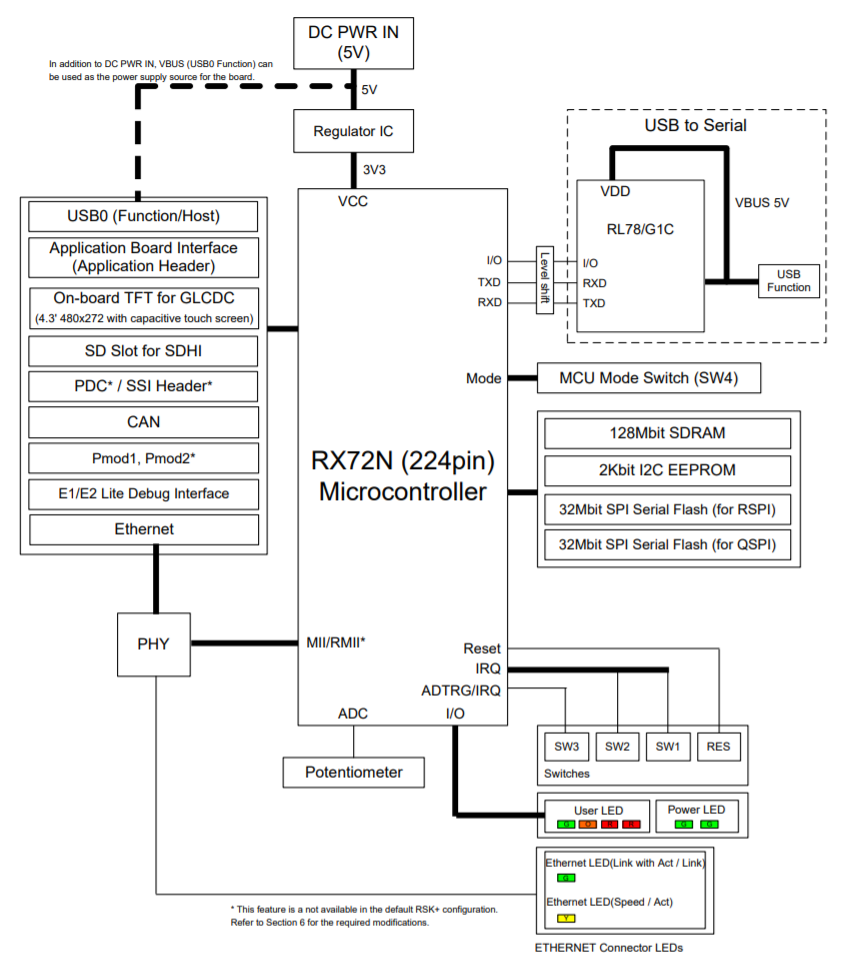
開發板系統框圖如下圖所示,因為只涉及到CAN功能,后面重點講解CAN功能的使用。
1
主要使用CAN功能,開發板使用的CAN收發器芯片采用R2A25416SP,查閱芯片數據手冊硬件原理圖上配置好相關的硬件,注意120歐姆終端電阻,作用是提高抗干擾能力,讓高頻低能量的信號迅速走掉,確保總線快速進入隱性狀態,讓寄生電容的能量更快走掉;提高信號質量,放置在總線的兩端,讓反射能量降低。
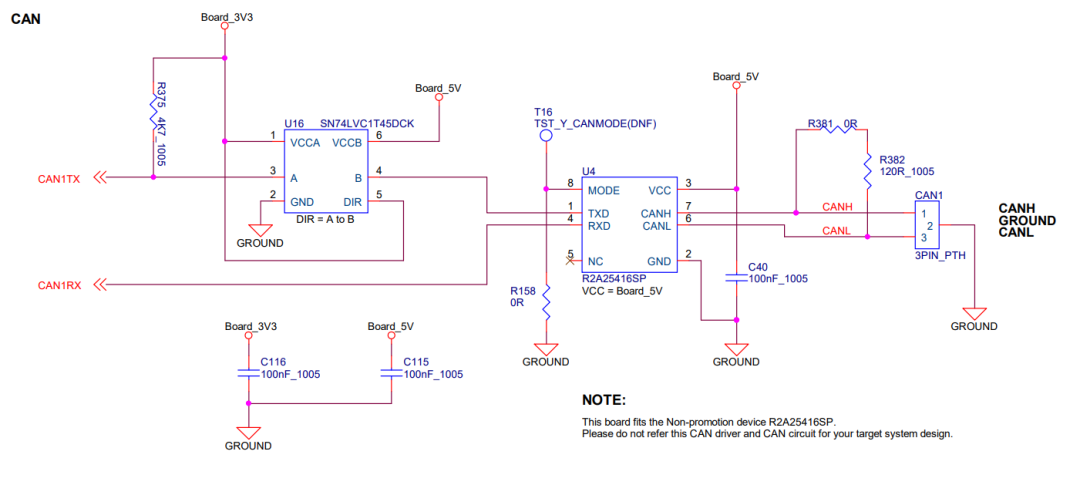
CAN功能原理圖
2
圖形化配置CAN的相關功能
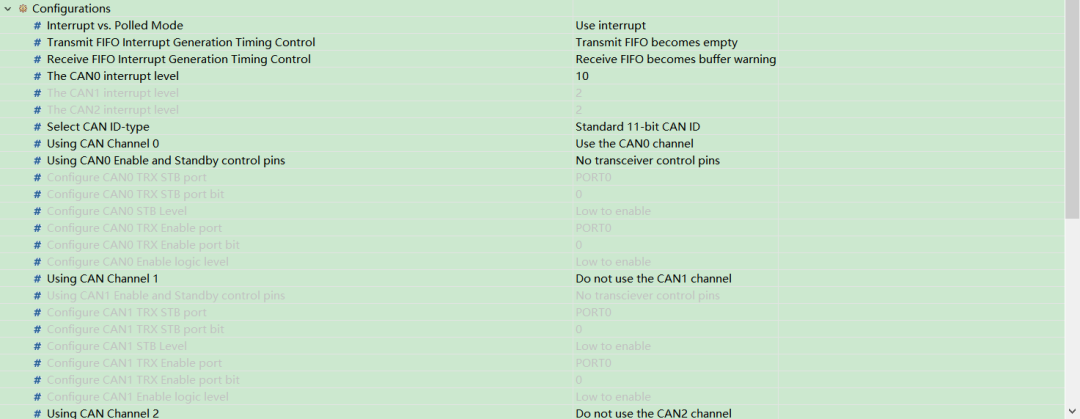
FIT庫軟件配置
2
軟件配置完成后,就可以編寫軟件代碼程序,編寫代碼的流程,基本就是創建CAN的基本參數、回調函數、使能通信引腳、開始收發處理等。
1
基本操作代碼
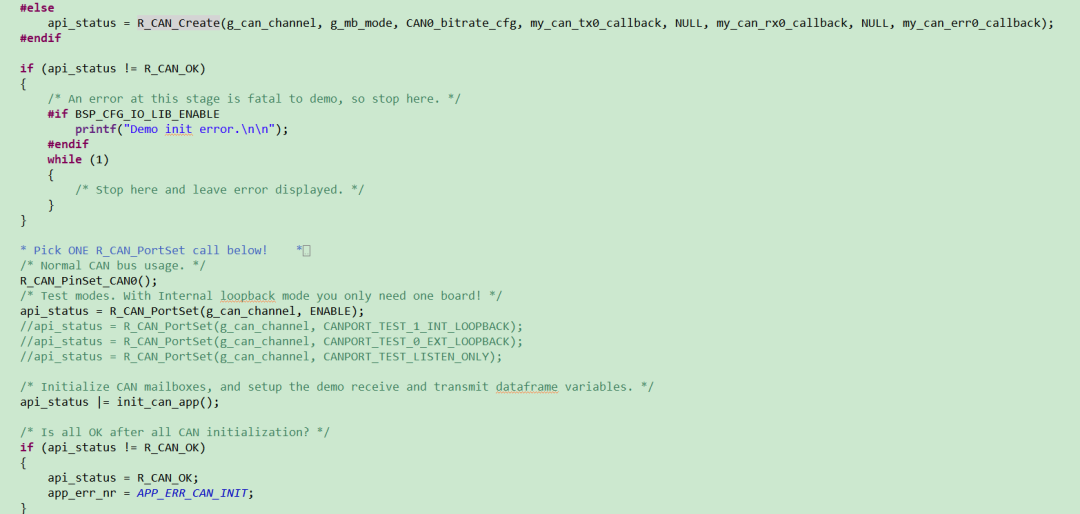
邏輯代碼
2
處理邏輯,中斷收發數據,進入FIFO操作
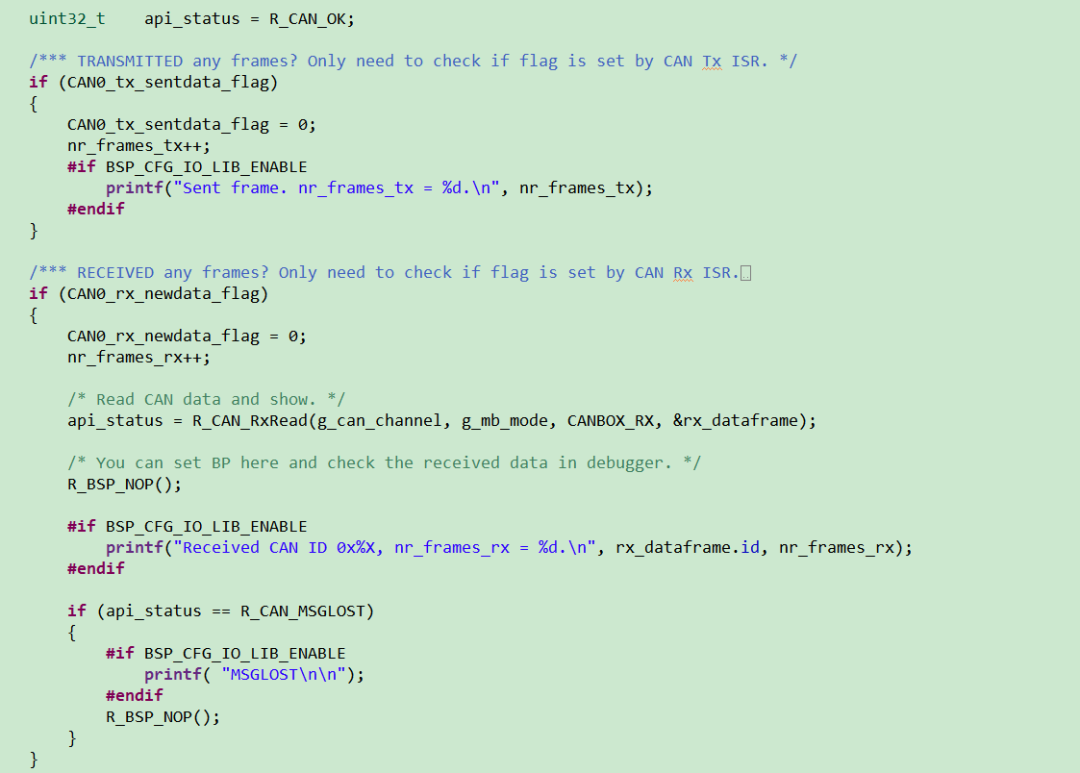
邏輯代碼
3
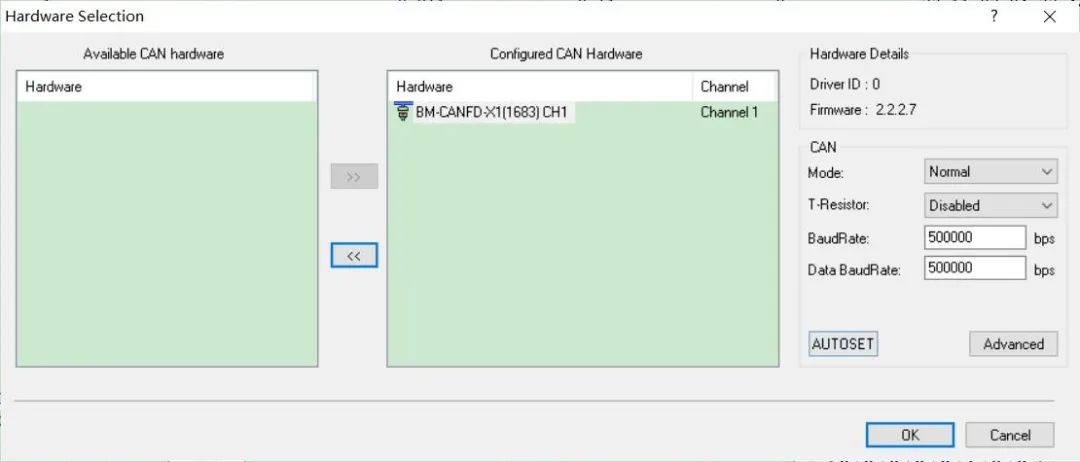
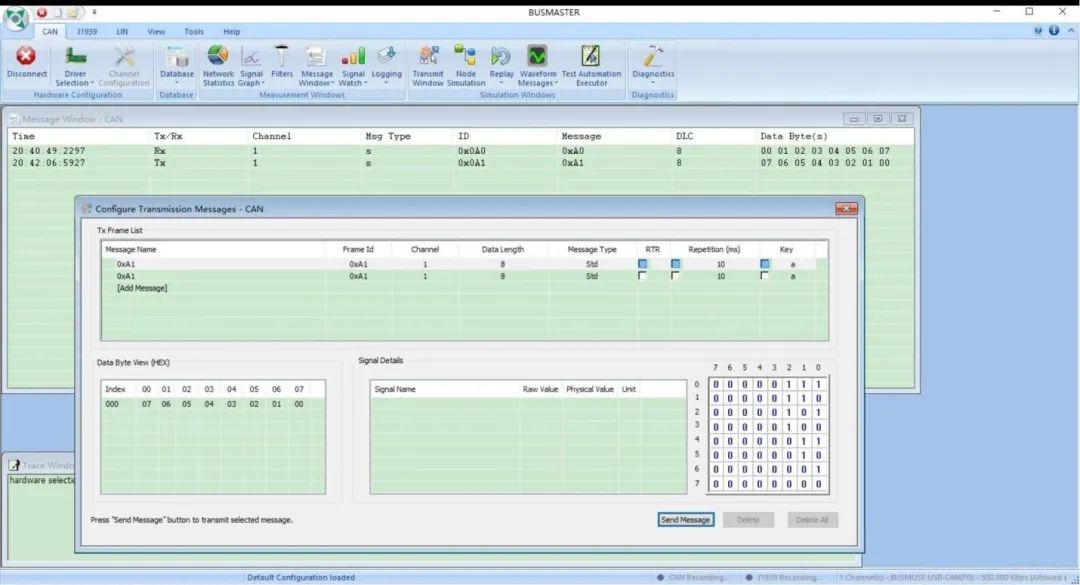
上位機界面
4
設置上位機需要與設備通信的數據
上位機界面
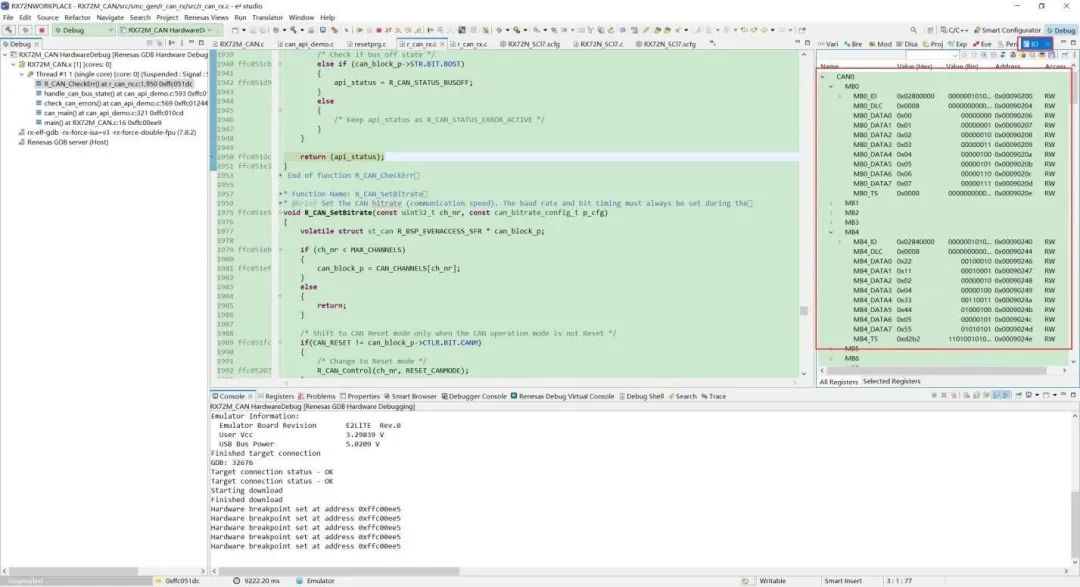
5
Debug調試程序觀察寄存器收到的數據
調試界面
6
CAN的波計算特率公式和相關參數的設置
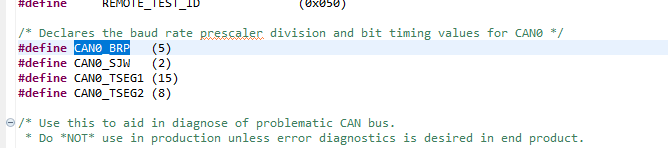

CAN波特率設置代碼
結論
CAN總線通信接口中集成了CAN協議的物理層和數據鏈路層功能,可完成對通信數據的成幀處理,包括位填充、數據塊編碼、循環冗余檢驗、優先級判別等工作。CAN協議的一個最大特點是廢除了傳統的站地址編碼,而代之以對通信數據塊進行編碼。采用這種方法的優點可使網絡內的節點個數在理論上不受限制,數據塊的標識符可由11位或29位二進制數組成,因此可以定義2或2個以上不同的數據塊,這種按數據塊編碼的方式,還可使不同的節點同時接收到相同的數據,這一點在分布式控制系統中非常有用。
原文標題:RX72N CAN通信收發教程
文章出處:【微信公眾號:瑞薩MCU小百科】歡迎添加關注!文章轉載請注明出處。
-
mcu
+關注
關注
146文章
17718瀏覽量
358200 -
瑞薩
+關注
關注
36文章
22356瀏覽量
87579
原文標題:RX72N CAN通信收發教程
文章出處:【微信號:瑞薩MCU小百科,微信公眾號:瑞薩MCU小百科】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
MHMF082L72N-MINAS A6BN 系列 技術資料 -EtherCAT 通信規格篇- 松下

MHMF082L72N-MINAS A6BU 系列 技術資料 -EtherCAT 通信規格篇- 松下
MHMF082L72N-MINAS A6N系列 (RTEX) 技術資料 -RTEX通信規格篇- 松下
MHMF042L72N-MINAS A6BN 系列 技術資料 -EtherCAT 通信規格篇- 松下
MHMF042L72N-MINAS A6BU 系列 技術資料 -EtherCAT 通信規格篇- 松下
MHMF042L72N-MINAS A6N系列 (RTEX) 技術資料 -RTEX通信規格篇- 松下
MHMF041L72N-MINAS A6N系列 (RTEX) 技術資料 -RTEX通信規格篇- 松下
CAN總線收發器的工作原理和應用
MHMF022L72N-MINAS A6N系列 (RTEX) 技術資料 -RTEX通信規格篇- 松下
MHMF021L72N-MINAS A6N系列 (RTEX) 技術資料 -RTEX通信規格篇- 松下
MHMF012L72N-MINAS A6N系列 (RTEX) 技術資料 -RTEX通信規格篇- 松下
MHMF011L72N-MINAS A6N系列 (RTEX) 技術資料 -RTEX通信規格篇- 松下





 工商網監
工商網監
評論