 美國復雜環境中具有彈性的自主機器人(RACER)項目
美國復雜環境中具有彈性的自主機器人(RACER)項目
導讀:美國國防高級研究計劃局(DARPA)的“復雜環境中具有彈性的自主機器人”(Robotic Autonomy in Complex Environments with Resiliency, RACER)項目一直在開發行駛速度與載人系統一樣快的越野自主作戰車輛。2022年4月,DARPA選擇英特爾公司為這些越野自動駕駛車輛開發一個模擬平臺,模擬這些車輛經常遇到的崎嶇不平的地形類型,該項目被稱為RACER-Sim。英特爾實驗室后續將與巴塞羅那的計算機視覺中心和得克薩斯大學奧斯汀分校合作,共同開發該模擬平臺。
RACER項目背景及定位
雖然自動駕駛汽車行業取得了巨大的自主化進展,但大多是針對結構良好、可預測性強的環境。在復雜的軍事相關環境中,機器人車輛并沒有表現出與作戰行動相匹配的速度,而且自主性也不可靠。雖然也存在能夠處理困難地形的車輛平臺,但其自主算法和軟件往往不能很好地處理和應對不斷變化的情況,以保持必要的速度并跟上士兵執行任務。
為此,美國國防高級研究計劃局(DARPA)開展了“復雜環境中具有彈性的自主機器人”(RACER)項目,旨在確保算法不會成為自主系統的限制性部分,同時自主作戰車輛能夠達到或超過士兵的駕駛能力。
按照項目的計劃,RACER要在項目開啟后的四年內開發新的算法技術,最大限度地利用無人地面車輛(UGV)的傳感器和機械極限,與有人駕駛或遠程操縱相同的速度和效率進行機動,并在DARPA主持的全國各地的各種地形實驗中不斷測試這些算法。DARPA將提供先進的UGV平臺,研究團隊將利用這些平臺在非結構化的越野地貌上進行反復循環的模擬和測試,以開發自主軟件能力。
2021年10月,DARPA把RACER項目第一階段的合同授予了卡內基梅隆大學、NASA-噴氣推進實驗室和華盛頓大學,正式開啟研究計劃,加快研發步伐。
據DARPA戰術技術辦公室(TTO)負責RACER項目的項目經理斯圖爾特·楊(Stuart Young)介紹:“RACER旨在顛覆性地推進機器人戰車在陸軍、海軍陸戰隊和特種部隊中的自主集成和實戰。”
RACER項目測試平臺
2021年11月,被選中的研究團隊收到了DARPA提供的第一輛測試車輛RACER Fleet Vehicles(RFV)——這是一種高性能的全地形車輛,配備了優異的傳感和計算能力。這些研究團隊用它來開發基于平臺的自主性,以便在DARPA主持的現場實驗中進行測試。
RFV
之所以由DARPA為每個團隊提供車輛,每個團隊都擁有相同的傳感器、相同的計算和相同的基于ROS的軟件基礎設施,是因為DARPA想要強調自主軟件和算法的開發,而不是看哪個團隊可以將最昂貴的傳感器裝在他們的車輛上。
RFV機器人包括360°范圍和圖像傳感,如多個激光雷達、立體相機、彩色和紅外成像相機、雷達、事件傳感器和慣性測量傳感。多個超強算力的圖形處理單元(GPU)安裝在專為滿足RACER高速、越野需求而設計的環保、防振/抗振和熱管理的電子箱 (E-Box)中。
傳感器和E-box組合能夠每小時收集4 TB的傳感器數據,以支持在復雜地形中進行快節奏作戰所需的人工智能、基于機器學習的自主算法和堆棧方法。每個RFV都包含對滾動保護、傳感器/電子盒集成、自主控制和增加7kW功率供電系統的修改。這些RFV由卡內基機器人有限責任公司 (Carnegie Robotics LLC,CRL)集成,安裝在Polaris RZR S4 1000 Turbo 基礎的線控驅動平臺上。
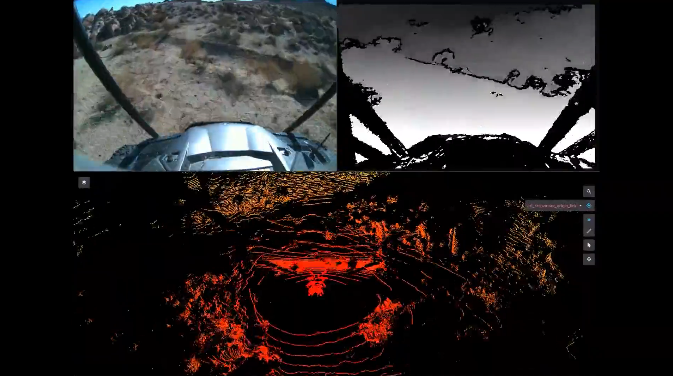
RACER傳感器圖像
2021年11月,三個RFV已交付給RACER第一階段的三個入圍團隊,以便隨后在位于加州歐文堡的陸軍國家訓練中心進行測試。DARPA的測試現場為各團隊提供了一個展示其自主算法在復雜環境中能力的舞臺。在歐文堡訓練中心,各團隊將展示他們在各種地形和距離長達5公里的路線上導航的能力。
為了進一步支持軟件開發,DARPA還從大西洋中部和西海岸500多公里的地形中收集了超過100 TB的基于RFV 的傳感器數據,這些數據均與團隊共享并在RACER開發工具中進行管理以提高效率和安全性。還將提供概念性政府基線算法和自主架構。此外DARPA還鼓勵各團隊與基礎研究型大學和工業聯盟合作,在協作機器人、學習和智能系統活動中,使用陸軍戰斗能力發展司令部研究實驗室的最新產品。
在第一階段,這些車輛是越野車類型的。如若第一階段取得成功,該項目第二階段參與的每個研究團隊將有機會使用進一步升級的車輛。
美國陸軍自主平臺演示器(APD)
美國陸軍的自主平臺演示器(APD)是一個六輪混合動力電動車,重近10噸,從一開始就被設計成無人駕駛。APD具備較強的跨越障礙的性能,最高速度為80km/h,可以爬升較大的坡度,也可原地調頭。
DARPA計劃在RACER項目的每個階段都進行一系列的現場實驗。每個實驗將持續10天,每隔6個月進行一次。第一階段的實驗區域長約5公里,DARPA將其描述為“通常是無路的越野自然地形,有植被、斜坡、離散障礙物和地面變化”。這些車輛還應該能夠處理常見的環境條件,包括“黃昏/黎明,中度灰塵,中度雨/雪,輕霧,自然陰影,照明變化,以及可能暴露在夜間條件下。”
各參與團隊得到的只是反應實驗區域的邊界、路線航點和最終目標的GPS坐標列表。如果需要,團隊也可以使用GPS來嘗試定位,但GPS信號可能不會在任何時候都可用,即使有,也只能精確到±10米。他們也可以使用地形圖,但分辨率只能達到1:50000。除此之外,各團隊在測試中不能使用任何外部定位或預先存在的信息,而且也不允許使用以前的地圖。為了確保目標的可實現性,DARPA將確保“在途經點之間將存在多條路線,由人類駕駛員駕駛時可以達到RACER速度指標”。
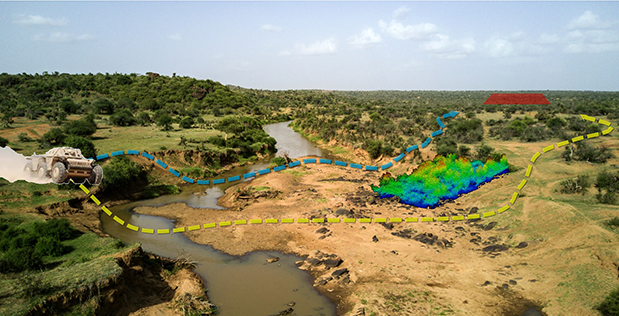
RACER項目的測試場景
DARPA的希望是,在第一階段,團隊能夠展示每小時18公里的平均自主速度,所需干預的頻率不超過每2公里一次。第二階段,使用APD,目標將明顯更加激進,路線長度為15至30公里或更多,平均自主速度目標為29公里/小時,每10公里才干預一次。這些指標是DARPA希望自主車輛能夠做到的。“以載人戰車的作戰節奏速度保持機動性,特別是以M1艾布拉姆斯主戰坦克為主要對象。”
RACER-Sim項目
在RACER項目開啟的同時,DARPA還授出了兩項合同給Duality Robotics和Intel-Federal團隊,以開發模擬環境來支撐越野自主算法的開發。該計劃被稱為RACER-Sim,旨在擴展當前的模擬能力和基于物理的模型,這些模擬環境將允許團隊模擬測試和驗證其自主算法的一部分,而無需花費大量時間和金錢進行現場測試。
2022年4月, DARPA把RACER-Sim合同授予英特爾公司的英特爾實驗室及其合作者——巴塞羅那計算機視覺中心和得克薩斯大學奧斯汀分校。
英特爾實驗室自動駕駛汽車實驗室主任German Ros在談到這個話題時表示:“英特爾實驗室已經開始通過包括CARLA模擬器在內的多個項目在開發自動駕駛汽車仿真方面取得了進展。我們很自豪能加入 RACER-Sim,為探索越野機器人和自動駕駛汽車領域的新視野做出貢獻。我們組建了一支由來自計算機視覺中心和得克薩斯大學奧斯汀分校的知名專家組成的團隊,目標是創建一個多功能和開放的平臺,以加速適用于所有類型環境和條件的越野地面機器人的進展。”
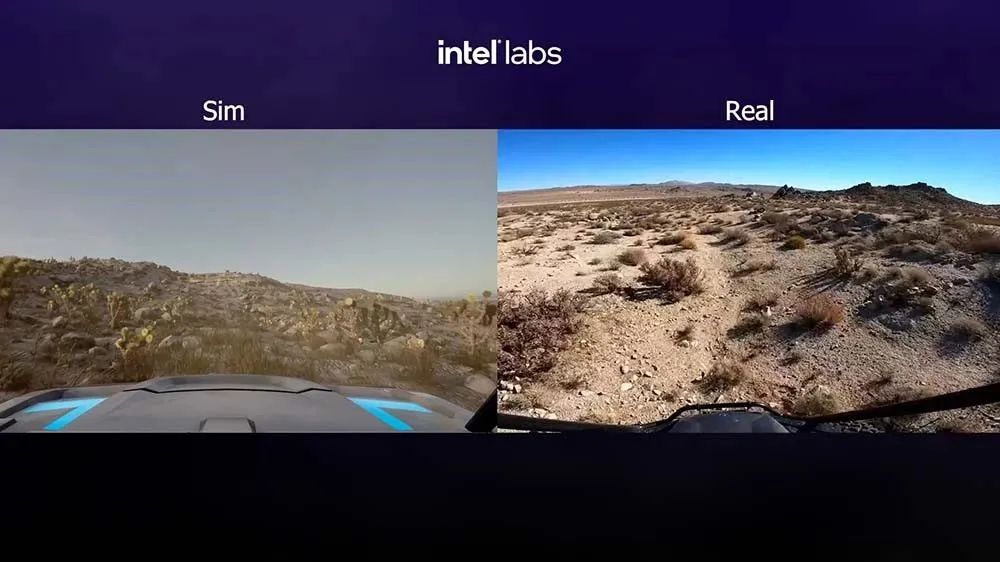
RACER-Sim的目標是提供高保真虛擬世界,用于開發和測試自主越野車輛
RACER-Sim由兩個階段組成,總共持續48個月,在第一階段,英特爾的重點是創建新的仿真平臺和地圖生成工具,以高精度模擬復雜的越野環境(例如物理特征、傳感器建模、地形復雜性等)。大規模創建模擬環境是一個傳統上需要大量資源的過程,也是模擬工作流程中最大的挑戰之一。英特爾實驗室的模擬平臺將支持對未來地圖的定制,包括只需點擊幾下即可創建覆蓋超過100000平方英里的大型新環境。
在第二階段,英特爾實驗室將與RACER合作者合作,通過在不使用物理機器人的情況下實施新算法來加速研發過程。然后,團隊將在模擬中驗證機器人的性能,從而節省大量時間和資源。第二階段還將包括開發新的Sim2real技術——在模擬中訓練機器人以獲取技能,然后將這些技能轉移到相應的真實機器人系統的概念——從而能夠直接在模擬中訓練越野自主地面車輛。
英特爾希望這些新的仿真工具能夠顯著改進使用虛擬測試的自主系統的開發,從而降低與傳統測試和驗證協議相關的風險、成本和延遲。未來,仿真平臺將超越驗證,創建可應用于現實世界中的AI模型。
小結
DARPA的RACER項目是對當前自主駕駛技術的巨大突破,相比于模式化的城市道路,軍事越野環境更具挑戰性和復雜性,有三維表面、數百個障礙物類別、較低的保真度、有限的地圖數據以及沒有確定的道路網絡或駕駛規則。雖然目前的公路自動駕駛不能直接轉移到越野領域,但公路自動駕駛車輛的傳感器、處理方法、感知算法和其他方法是適用的。RACER正是試圖利用這些已有技術,將其應用于軍事越野領域,并將其推廣到更廣闊的環境中。
審核編輯 :李倩
-
機器人
+關注
關注
211文章
28390瀏覽量
206951 -
自動駕駛
+關注
關注
784文章
13787瀏覽量
166406
原文標題:美國復雜環境中具有彈性的自主機器人(RACER)項目
文章出處:【微信號:CloudBrain-TT,微信公眾號:云腦智庫】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】+初品的體驗
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
【書籍評測活動NO.51】具身智能機器人系統 | 了解AI的下一個浪潮!
旗晟軌道巡檢機器人:復雜環境中的安全衛士

開源項目!用ESP32做一個可愛的無用機器人
開源項目!用ESP32做一個可愛的無用機器人
安防巡檢機器人:守護安全的智能衛士

柔性機器人與剛性機器人區別與聯系

Al大模型機器人
奧比中光AMR機器人OEM項目首批成功下線交付
全球機器人開發領域采用NVIDIA 機器人開發和生產
其利天下技術·搭載無刷電機的掃地機器人的前景如何?
現代戰場中地面機器人的應用與影響
自主移動機器人(AMR)功能和特點






 工商網監
工商網監
評論