 什么是EPSON機器人與上位機TCP通信
什么是EPSON機器人與上位機TCP通信
前言
大家好,今天跟大家分享一下,EPSON機器人如何與視覺上位機實現TCP通信。
連接機器人
這里使用的機器人是EPSON T3系列的一款Scara機器人。
機器人的編程軟件使用的是EPSON RC++ V7.4.5版本,如果大家需要該軟件,可以通過公眾號回復 304 。
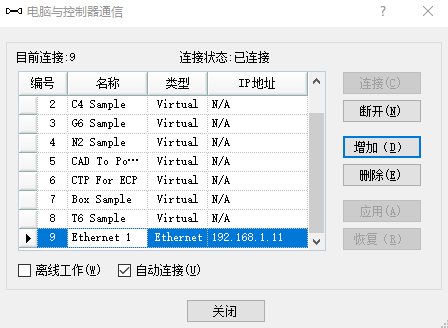
首先需要建立與機器人之間的連接,一般與機器人之間連接有兩種方式,一種是USB串口,一個是以太網口,這里采用的是以太網接口。
SPEL+命令
EPSON機器人編程使用的是SPEL+語言,需要參考SPEL+的相關命令進行編程。
這里羅列幾個EPSON以太網編程的關鍵命令。
1、SetNet命令
參數列表:
通信端口編號:指定要設置參數的 TCP/IP 的端口編號。范圍為 201~216。
主機地址:指定主機的 IP 地址。
TCP/IP 端口編號:指定 TCP/IP 端口編號。
終止符:指定 CR、LF、CRLF 中某個行末字符。
流控制:是指軟件流控制,默認為NONE。
超時時間:以秒指定收發的最長時間。指定0時,超時則變為無限。
通信協議:指定通信的協議(TCP/UDP)類型。
使用示例:
SetNet #201, "192.168.0.1", 2001, CRLF, NONE, 0
2、OpenNet命令
格式:
OpenNet #端口編號 As Client/Server
參數列表:
端口編號:指定要打開的 TCP/IP 端口編號的整數值。端口編號的范圍為 201~216。
使用示例:
Function tcpip
String data$
OpenNet #201 As Client
WaitNet #201
Input #201, data$
Print "received '", data$, "' from host 1"
Fend
3、ChkNet命令
格式:
ChkNet (通信端口編號)
參數列表:
通信端口編號:指定 TCP/IP 端口編號(201~216)。
返回值
返回接收字符數(整數值)。
如果不存在接收數據,以下負值返回端口狀態。
-1 端口已打開,但是未確立通信
-2 其他任務正在使用端口
-3 未打開端口
使用示例
Integer numChars
numChars = ChkNet(201)
4、Line Input命令
格式:
Line Input #端口編號, 字符串變量名$
參數列表:
端口編號:表示文件、通信端口、數據庫或裝置的ID編號。
字符串變量名$:指定字符串變量名。
EPSON編程
1、TCP子函數
'定義接收和輸出變量
Global String ReceiveData$, SendData$
Function ASTCPClient
'設置IP地址、端口號、結束符等
SetNet #201, "192.168.1.100", 2000, CRLF, NONE, 0
'機器人作為客戶端,打開端口
OpenNet #201 As Client
'等待連接
WaitNet #201
'連接成功顯示
Print "TCP ConnectOK....."
Do
'斷線重連
If ChkNet(201) = -3 Then '檢查端口狀態(>0 時為緩沖字符數量.<0 為異常狀態)
CloseNet #201 '關閉端口再重連
Wait 0.2
OpenNet #201 As Client '打開客戶端
WaitNet #201 '等待連接
EndIf
'接收上位機數據
If ChkNet(201) > 0 Then
Line Input #201, ReceiveData$
Print "【" + Date$ + " " + Time$ + "】" + "接收到上位機的數據:" + ReceiveData$
EndIf
'發送數據
If SendData$ <> "" Then
Print #201, SendData$
Print "【" + Date$ + " " + Time$ + "】" + "發送給上位機:" + SendData$
SendData$ = ""
EndIf
Loop
Fend
2、主函數調用
Function main
'多線程執行
Xqt ASTCPClient
Fend
通信測試
1、先用網絡調試助手開一個TCPServer,IP地址是192.168.1.100,這里大家根據自己的電腦IP來設置,端口號為2000。

2、EPSON機器人選擇菜單欄中的運行,會直接將程序下載到機器人中。

3、下載完成后,點擊開始,即可實現通信。

4、可以通過網絡調試助手給機器人發指令。

-END-
-
EPSON
+關注
關注
1文章
130瀏覽量
85639 -
上位機
+關注
關注
27文章
941瀏覽量
54790 -
TCP通信
+關注
關注
0文章
146瀏覽量
4221
發布評論請先 登錄
相關推薦
關于labview如何控制EPSON機器人(型號:LS3-401S)
上位機和下位機通信問題
上位機全套程序,上位機與機器人和PLC通訊都是通過以太網總線方式
【科普】干貨!帶你從0了解移動機器人(三) ——自主導航系統及上位機軟件設計與實現
EPSON RC+ 7.0用于開發機器人控制器的應用軟件使用手冊免費下載

TCP通信UDP通信串口通信C#上位機

ABB機器人與上位機進行Socket通信的RAPID代碼實現(服務端)
在機器人公司做軟件開發是什么體驗?PLC上位機入門應該知道





 工商網監
工商網監
評論