") 無人機高光譜遙感的水質(zhì)參數(shù)反演
無人機高光譜遙感的水質(zhì)參數(shù)反演
引言
實時、快速監(jiān)測礦區(qū)周圍地表水狀況是防治礦區(qū)水環(huán)境污染的前提。懸浮物(suspendedsub-stance,SS)是水體中懸浮物顆粒物質(zhì)的總稱,濁度(turb)即水體的混濁程度是用來估計懸浮物質(zhì)量的關鍵。傳統(tǒng)水質(zhì)參數(shù)檢測手段是實地采樣,通過實驗室生化檢測獲得,該方法能對水質(zhì)指標做出較為精確的評價,但由于樣品少、耗時長,難以全面表達地表水的水質(zhì)狀況。遙感技術具有高動態(tài)、低成本和宏觀性等優(yōu)勢,可以快速對大范圍水域進行監(jiān)測,反映水質(zhì)在空間和時間上的分布和變化情況。
數(shù)據(jù)采集分析
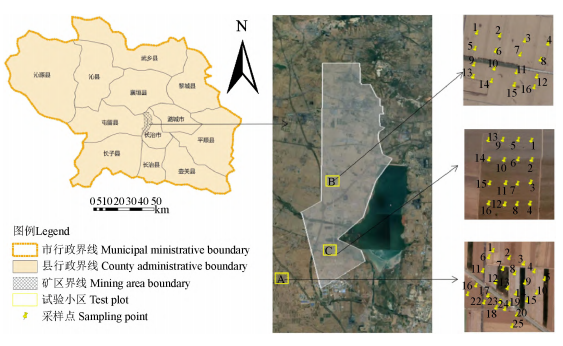
選擇河南省信陽市羅山縣定遠鄉(xiāng)石材開采區(qū)(31°44′~31°52′N,114°26′~114°34′E)水庫為研究區(qū),使用高光譜輻射儀在350~1000nm波譜段內(nèi)按照1.4nm間隔采樣,1001~2500nm波段采樣間隔為2nm。水面光譜采用傾斜法進行測量,每次測定前需對輻射儀進行校正,單個樣點重復采集5次,以均值為光譜反射值。
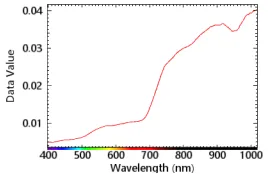
依據(jù)采集光譜數(shù)據(jù)繪制水面光譜反射曲線(圖2)。由圖2可以看出,采樣點在350~500nm波段區(qū)間反射率變化基本一致,光譜反射率較低,這是由于水體葉綠素與其他可溶性有機物在該波段內(nèi)的吸收率較高。反射率隨著波長的增加而增大,波峰出現(xiàn)在580nm附近。達到峰值后,反射率隨著波長的增大迅速降低,在800~1000nm的近紅外波段趨近于0,這是由于純水的吸收波段主要在近紅外波段內(nèi)。
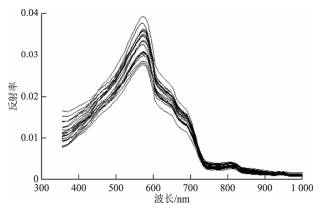
圖2水面實測光譜反射率
使用無人機搭載推掃式高光譜相機,其光譜范圍為380~1000nm,光譜和空間分辨率為3.5nm 和0.22m。波段小于400nm和大于900nm的信噪比較低,故選擇400~900nm 波段。對高光譜影像進行小波變換濾波見式(1)

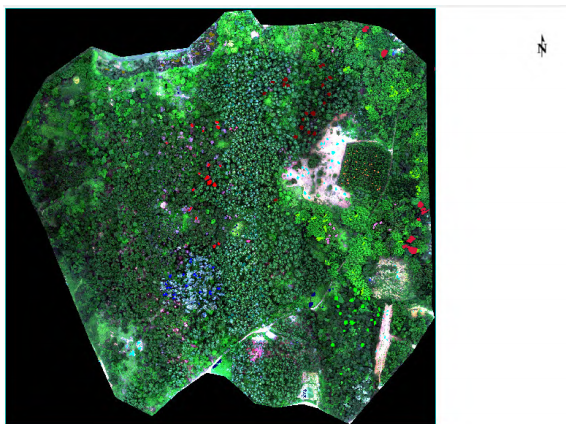
經(jīng)小波濾波去噪,高光譜數(shù)據(jù)前后對比(圖3)。
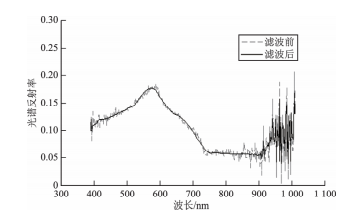
圖3無人機高光譜反射率小波去噪
研究方法
采用相關分析法,根據(jù)地面實測光譜數(shù)據(jù)與懸 浮物濃度、濁度的關系,選擇出最佳反演波段,并利用決定系數(shù)(R2)與均方根誤差(RMSE)對線性模型、指數(shù)模型和乘冪模型進行評定,建立水質(zhì)參數(shù)反演模型。推廣到無人機高光譜數(shù)據(jù)中,選擇最優(yōu)波段,對選擇出的波段進行懸浮物濃度與濁度反演。水質(zhì)參數(shù)與水面光譜數(shù)據(jù)相關性分析。計算不同波長反射率與目標參數(shù)間的相關系數(shù),分析波長反射率與目標參數(shù)之間關聯(lián)性。構(gòu)建歸一化差值指數(shù)式,見式(2)。

式中:ρi、ρj代表第i、j波段水面實測反射率;i、j取值范圍為350~1000nm。計算NDSI與懸浮物濃度、濁度間的Pearson相關系數(shù),見式(3)。
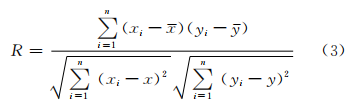
式中:R為相關系數(shù);n為樣品總數(shù)(取值20);xi為第i個樣品的光譜值;yi為第i個樣品的水質(zhì)參數(shù)。選擇相關性最高波段組合構(gòu)建NDSI,建立研究區(qū)懸浮物濃度和濁度的反演模型。計算均方根誤差進行模型精度評定,由于樣本數(shù)量較少,本文采用留一法(leave-one-out)交叉驗證數(shù)據(jù),對模型進行精度評價。采用式(4)的表達式。
結(jié)果與分析
4.1 水質(zhì)參數(shù)反演模型構(gòu)建
通過逐波段遍歷構(gòu)建NDSI,計算其與懸浮物濃度、濁度間的Pearson相關系數(shù)。建立相關性分布圖4、圖5。觀察單波段反射率與水質(zhì)參數(shù)間的相關系數(shù)分布(圖4),水質(zhì)參數(shù)的相關系數(shù)隨波長的變化呈現(xiàn)出相似的趨勢,即懸浮物濃度值越高,對應水體濁度值越高,這一現(xiàn)象與兩水質(zhì)參數(shù)的定義相吻合。分析相關系數(shù)等值線分布(圖5),懸浮物濃度相關系數(shù)最大值為0.856,對應波長500、670nm;濁度相關系數(shù)最大值為0.874,對應波長540與625nm。本研究決定以NDSI(500,670)和NDSI(540,625)為自變量,分別構(gòu)建研究區(qū)水庫的懸浮物濃度和濁度反演模型。
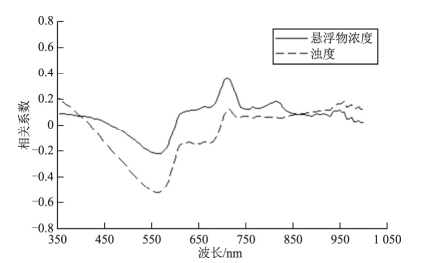
圖4懸浮物濃度、濁度與反射波譜的相關性分布
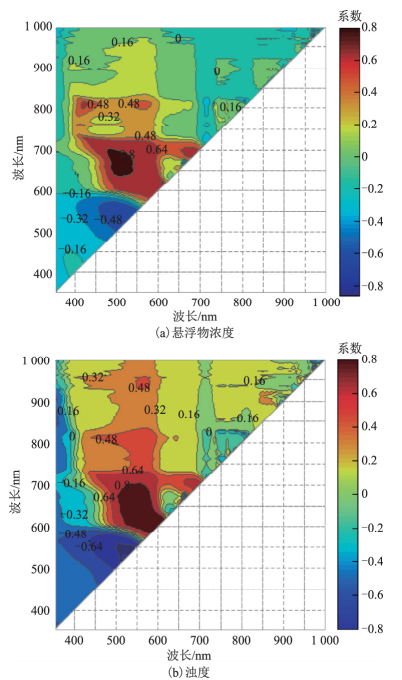
圖5相關系數(shù)等值線分布
表1水質(zhì)參數(shù)反演模型分析
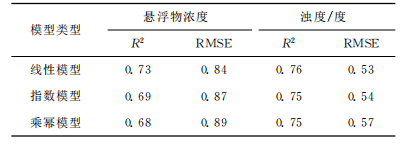

圖6懸浮物濃度與濁度反演結(jié)果
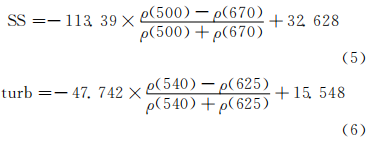
構(gòu)建的水域水質(zhì)參數(shù)(懸浮物濃度(SS)、濁度(turb))反演模型為式(5)、式(6)。
4.2無人機高光譜水質(zhì)參數(shù)反演
將無人機獲取的同時期研究區(qū)高光譜影像數(shù)據(jù)結(jié)合構(gòu)建的水質(zhì)參數(shù)反演模型進行反演,繪制出水庫懸浮物濃度和濁度分布。如圖8所示,礦區(qū)附近水域的懸浮物濃度在0~97mg/L,多數(shù)處在4~13mg/L;濁度則在0~45度,多數(shù)處在5~8度。水體較為清澈,無明顯污染現(xiàn)象,水庫邊界處的懸浮物濃度和濁度較高,與反演結(jié)果一致,符合實際實地調(diào)研結(jié)果。
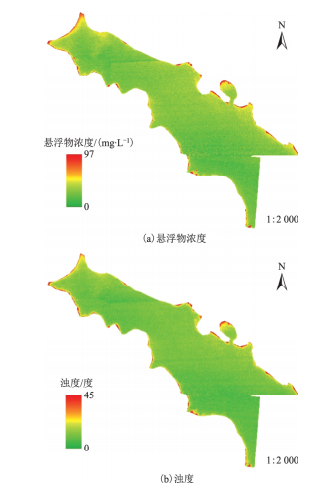
圖8礦區(qū)水域水質(zhì)參數(shù)濃度分布
結(jié)論
本文以實測光譜和采樣的水質(zhì)參數(shù)為數(shù)據(jù)源建立反演模型,利用無人機高光譜遙感,實現(xiàn)水體懸浮物濃度和濁度的精準監(jiān)測。通過實例驗證,得出結(jié)論:①采用波長500、670和540、625nm計算的歸一化差值指數(shù)所構(gòu)建的線性模型,可以作為懸浮物濃度與濁度的反演模型;②基于本文建立的水質(zhì)參數(shù)反演模型,利用無人機高光譜遙感,可以快速監(jiān)測小中型水域的水質(zhì)參數(shù)。相比于衛(wèi)星影像,無人機有著實時、高時間空間分辨率的優(yōu)點,可用于礦區(qū)水域污染監(jiān)測預警,對礦區(qū)環(huán)境保護有著重要參考意義。隨著高光譜衛(wèi)星的發(fā)展,未來可以進一步探討基于高光譜衛(wèi)星影像的水質(zhì)反演,優(yōu)化模型降低成本,提供穩(wěn)定的時序監(jiān)測能力,為水質(zhì)監(jiān)測與環(huán)保提供長期的參考與支持。
歡迎關注公眾號:萊森光學,了解更多光譜知識。
萊森光學(深圳)有限公司是一家提供光機電一體化集成解決方案的高科技公司,我們專注于光譜傳感和光電應用系統(tǒng)的研發(fā)、生產(chǎn)和銷售。
審核編輯黃宇
-
遙感
+關注
關注
0文章
246瀏覽量
16818 -
無人機
+關注
關注
230文章
10428瀏覽量
180254 -
高光譜
+關注
關注
0文章
330瀏覽量
9940
發(fā)布評論請先 登錄
相關推薦
無人機搭載高光譜成像系統(tǒng)

無人機低空高光譜遙感影像柑橘黃龍病植株監(jiān)測模型探究

無人機遙感技術
無人機遙感技術
無人機水質(zhì)遙感監(jiān)測方法
無人機高光譜在農(nóng)田信息監(jiān)測中的應用
基于無人機高光譜遙感的森林可燃物分類方法研究-萊森光學
煤炭礦區(qū)耕地土壤有機質(zhì)無人機高光譜遙感估測
比較基于無人機高光譜影像和傳統(tǒng)方法的土壤類型分類精度

基于無人機高光譜遙感的典型草原打草對植被表型差異分析
基于無人機高光譜遙感的荒漠化草原地物分類研究2.0
無人機機載高光譜成像系統(tǒng)的應用及優(yōu)勢
基于無人機多光譜遙感的棉花生長參數(shù)和產(chǎn)量估算
基于無人機高光譜遙感的河湖水環(huán)境探測





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論