 SafeRobot CRR模式設置
SafeRobot CRR模式設置
SafeRobot CRR模式(安全機器人收回)
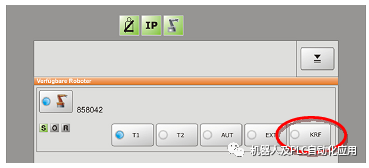
如果機器人違反了監控功能并被安全控制器停止,則只能在 CRR 模式下將其移出違反區域。CRR 模式下的運動速度對應于安全配置中定義的 T1 模式下安全降低的笛卡爾速度。
在 CRR 模式下,機器人可以移動到任意位置。
如果它通過其他監控限制,則不會觸發停止。速度監控功能在 CRR 模式下保持激活狀態。
KUKA _SafeRobot->SafeOperation檢查參考.
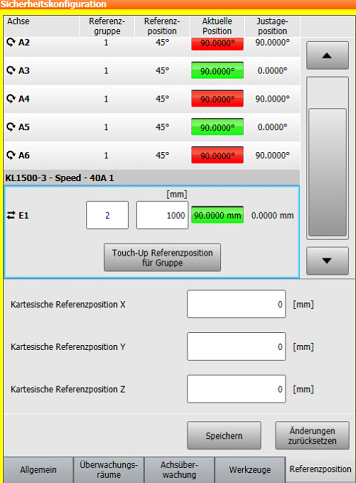
參考點組(參照組)
選擇參考點位置
選擇標準 參考點位置必須根據以下標準進行選擇:
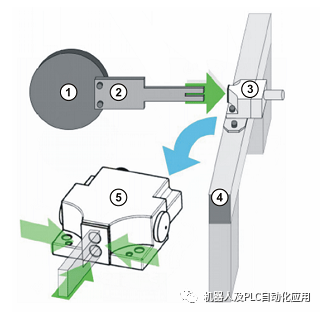
? 參考點開關的位置和觸發板不會妨礙機器人的工作。
? 軸在參考點位置處不得彼此位于奇點內。
? 參考點開關的兩個接近開關表面在參考點位置處由觸發面觸發(觸發板或工具)。
? 同一個參考點組中的所有軸位于參考點位置,以便觸發參考點開關。
? 機器人軸在參考點位置處距零點標定位置至少有 ±5°(旋轉軸)或±15 mm(線性軸)。
? 參考點開關的位置位于機器人運動范圍內。
2.安裝參考點開關和觸發板。
3.連接參考點開關。
連接參考點開關連接導線:X42 插入機器人控制系統,XS Ref 插入參考點開關。
或者和PLC相連接,通過PLC與機器人通訊的安全點反饋給機器人."JR"零點復歸(參考點開關的輸入端).
4.配置用于零點復歸測試外部要求的輸入信號$MASTERINGTEST_REQ_EXT。
該信號已在目錄 KRC:ROBOTER KRCSTEUMADA 下的文件$machine.dat 中進行了聲明且必須分配給一個合適的輸入端。
默認設置下,信號位于 $IN[1026]。

5. 在文件“masref_user.dat”和安全配置中配置待檢查的參考點組。
6. 在程序“masref_user.src”中示教零點復歸測試位置。必須在程序“masref_user.src”和安全配置中示教參考點位置。
7. 僅在參考點開關被工具的鐵磁體部分觸發時或在更換工具之后:檢查參考點位置的準確度。
8. 如果應自動啟動零點復歸測試:將程序“masref_main.src”以適當的形式接入應用程序,使其可作為子程序循環調用。
9. 如果應手動啟動零點復歸測試:手動啟動程序“masref_main.src”。
參考位置必須符合以下標準:
距母版位置至少+/-5°
軸不能處于奇點的相對位置
不得妨礙程序執行
必須啟動兩個接近開關表面(最大距離2mm)
調整參考用于檢查機器人的當前位置和附加軸是否與r參考位置一致。
當使用Modulo 360°調整參考值時,即考慮到無限旋轉的軸,即 h。參考位置始終相對于圓。
如果當前位置和參考位置之間的偏差太大,則調整參考失敗。機器人以安全停止1停止,并且只能在操作模式T1下移動。如果調整參考成功,則可以使用安全控制器對機器人進行安全監控。
只要未進行調整參考,就不會驗證要監視的位置。建議盡快進行調整參考。
安全專員必須通過風險評估來確定特定系統是否需要其他安全措施,例如: B.不進行調整參照時的參照停止。
必須將要安全監控的每個軸分配給一個參考組。機器人軸始終分配給參考組1.可以將其他軸分配給其他參考組,也可以分配給參考組1
對于調整參考,參考組的所有軸都必須在參考位置,以阻尼參考按鈕。如果參考組的所有軸均未參與阻尼參考按鈕,則無法檢查軸的位置。
以下事件要求調整引用:
1.機器人控制重新啟動(內部要求)
2.機器人已重新調整(內部要求)
審核編輯:劉清
-
控制器
+關注
關注
112文章
16337瀏覽量
177829 -
機器人
+關注
關注
211文章
28389瀏覽量
206942 -
plc
+關注
關注
5010文章
13276瀏覽量
463091
原文標題:KUKA _SafeRobot 參考點設置及檢查參考點請求V2.22
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
求助,關于STM32F103翻轉使用的疑問求解
求助,關于比較寄存器TIMx_CRR1賦值的疑問
直流電子負載儀的設置CV模式下負載
KUKA SafeRobot CRR模式介紹
伺服電機的幾種常用模式及控制模式的設置(DS402)

松下伺服驅動器速度模式參數設置方法
松下伺服速度控制模式怎么設置
焊接機器人示教模式怎么設置






 工商網監
工商網監
評論