

本應(yīng)用筆記介紹了基于PC的14位數(shù)據(jù)采集系統(tǒng)的設(shè)計(jì)。它采用系統(tǒng)方法,包括所有必要的構(gòu)建模塊:模擬、數(shù)字、硬件和軟件。它討論了每個(gè)步驟,在集成系統(tǒng)之前分別測(cè)試系統(tǒng),并詳細(xì)介紹了在此過(guò)程中學(xué)到的陷阱。
關(guān)于典型數(shù)據(jù)采集系統(tǒng)中的構(gòu)建模塊的文章很多,但很少有文章涉及從模擬輸入到PC顯示的整個(gè)系統(tǒng)。為了解決設(shè)計(jì)完整數(shù)據(jù)采集系統(tǒng)時(shí)遇到的所有問(wèn)題,工程師可能需要收集十篇文章。
以下應(yīng)用筆記描述了基于PC的14位數(shù)據(jù)采集系統(tǒng)的設(shè)計(jì)。它采用系統(tǒng)方法,包括所有必要的構(gòu)建模塊:模擬、數(shù)字、硬件和軟件。它討論了每個(gè)步驟,在集成系統(tǒng)之前分別測(cè)試系統(tǒng),并詳細(xì)介紹了在此過(guò)程中學(xué)到的陷阱。
設(shè)計(jì)規(guī)范
任務(wù):設(shè)計(jì)基于帶片內(nèi)RAM(MAX14)的125位同步采樣ADC的功率計(jì)。
對(duì)于任何嘗試使用傳統(tǒng)儀器測(cè)量DC-DC轉(zhuǎn)換器的輸入和輸出特性的人來(lái)說(shuō),對(duì)功率計(jì)的需求都是顯而易見的。該設(shè)計(jì)允許用戶在被測(cè)器件上執(zhí)行負(fù)載測(cè)量,而無(wú)需連接無(wú)窮無(wú)盡的意大利面條式測(cè)試引線。圖 1 顯示了個(gè)人計(jì)算機(jī) (PC) 監(jiān)視器上完整的功率計(jì)顯示。
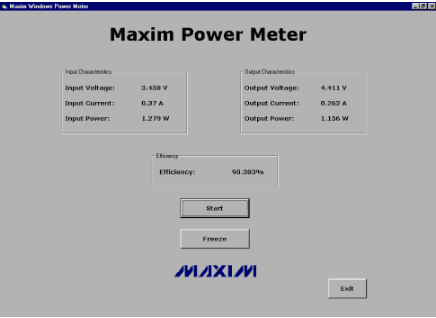
圖1.帶有示例讀數(shù)的視窗電腦輸出。
為了滿足升壓、降壓和線性實(shí)現(xiàn)的需求,輸入和輸出的測(cè)量范圍均選擇為30V。大多數(shù)高質(zhì)量的 DC-DC 轉(zhuǎn)換器的工作頻率為 100kHz 或更高。因此,系統(tǒng)的頻率響應(yīng)應(yīng)高于100kHz,但較慢的響應(yīng)也是可以接受的,因?yàn)殚_關(guān)波形具有合理的重復(fù)性。
系統(tǒng)的14位分辨率在設(shè)計(jì)階段并不是最重要的,因?yàn)?.1%(10位)以內(nèi)的測(cè)量對(duì)于大多數(shù)功率計(jì)應(yīng)用來(lái)說(shuō)已經(jīng)完全足夠了。數(shù)字化后,結(jié)果通過(guò)RS-232接口上傳并顯示在PC屏幕上,更新速率為每秒一次(與大多數(shù)萬(wàn)用表一樣)。一旦數(shù)據(jù)到達(dá)RS-232端口,PC的力量就可以釋放出來(lái)。完整的電路圖(圖2)將在以下章節(jié)中討論:
圖2.電路圖。
模擬前端
精密電阻分壓器可實(shí)現(xiàn)高達(dá) 30V 的精確電壓測(cè)量。Vishay 薄膜的 ORNA10-1 是一個(gè)經(jīng)過(guò)調(diào)整的電阻網(wǎng)絡(luò),包括兩個(gè) 1kΩ 值和兩個(gè) 10kΩ 值。這四個(gè)電阻的比例精度為0.05%,因此提供施加電壓的精度分?jǐn)?shù)(1/11)。MAX125的故障保護(hù)輸入具有±5V范圍,在故障條件下具有一定程度的安全性,并為輸入和輸出電壓測(cè)量提供了充足的裕量。
輸入和輸出電流使用精密電流放大器MAX471測(cè)量。該器件測(cè)量?jī)?nèi)部 30mΩ 電阻兩端的電壓,并提供幅度等于每安培高端電流 500uA 的輸出電流。因此,外部電阻的值縮放輸出電壓,在這種情況下,通過(guò)選擇4.7kΩ的值來(lái)實(shí)現(xiàn)合適的分辨率。
MAX125的寬輸入能力和故障保護(hù)電路使其輸入阻抗低于同等競(jìng)爭(zhēng)器件,因此在進(jìn)入ADC之前對(duì)四個(gè)讀數(shù)進(jìn)行緩沖。單位增益緩沖級(jí)取自MAX4254四通道精密運(yùn)算放大器,其輸入失調(diào)電壓(70uV)低于系統(tǒng)分辨率。
MAX125輸入經(jīng)過(guò)緩沖主要是為了克服其低輸入阻抗,但即使轉(zhuǎn)換器具有高輸入阻抗,從低阻抗驅(qū)動(dòng)ADC始終是一種良好做法。由于采樣/保持電路通常放置在ADC輸入端,緩沖器提供必要的驅(qū)動(dòng),以便在可接受的時(shí)間內(nèi)為采樣/保持電容充電。要了解源阻抗必須有多低,請(qǐng)考慮對(duì)RC時(shí)間常數(shù)進(jìn)行簡(jiǎn)單計(jì)算。輸入電容的充電根據(jù)
VCAP = VIN (1?e?t/CR),
其中C為采樣電容,R為源極電阻,V為源極電阻在是施加到RC電路的電壓。V之間的電壓差在和 V帽是:
VIN ?VCAP = VIN e?t/CR
因此,給定采樣和保持電容器的值(通常為10-30pF)、電容器的充電時(shí)間和可容忍的誤差電壓(1/2 LSB),可以計(jì)算出在給定時(shí)間內(nèi)為電容器充電的最大允許信號(hào)源電阻。
輸入緩沖器還可以用作濾波器,用于刪除不需要的信號(hào)。由于ADC是一個(gè)采樣系統(tǒng),其輸出具有以采樣頻率一半為中心的頻譜對(duì)稱性。因此,大于采樣頻率一半的信號(hào)與小于采樣頻率一半的信號(hào)無(wú)法區(qū)分。例如,對(duì)于10kHz采樣頻率,ADC無(wú)法區(qū)分4kHz和6kHz輸入,因?yàn)閮烧叨际菍?duì)稱的,大約是采樣頻率(5kHz)的一半。雖然對(duì)于本文的范圍來(lái)說(shuō)過(guò)于詳細(xì),但這種效應(yīng)(混疊)和描述它的定理(奈奎斯特定理)在許多論文和書籍中都有描述。
“抗混疊濾波器”可消除這些不需要的頻率。如果您考慮任何非純正弦信號(hào)的頻譜,混疊的影響可能會(huì)非常微妙。根據(jù)定義,非正弦波具有諧波,這些較高的諧波向下轉(zhuǎn)換以在較低頻率處引起誤差。同樣,除非輸入信號(hào)頻率范圍明確,否則組合緩沖器和抗混疊濾波器始終是良好的設(shè)計(jì)實(shí)踐。
需要最少的濾波,因?yàn)橛袉?wèn)題的系統(tǒng)只接受點(diǎn)讀數(shù)。對(duì)于更高的采樣頻率,使用元件C1、C2、C3和C4的簡(jiǎn)單低通濾波器可在ADC輸入之前提供信號(hào)滾降。這些元件還用于平均ADC獲取的讀數(shù),并有效消除輸入和輸出功率測(cè)量中的紋波。
數(shù)字化
MAX125為獨(dú)立的、同步采樣、逐次逼近的數(shù)據(jù)采集系統(tǒng),具有片內(nèi)RAM。它使用2x4采樣/保持放大器對(duì)兩組四個(gè)信號(hào)進(jìn)行采樣,然后由單個(gè)ADC模塊按順序數(shù)字化。結(jié)果存儲(chǔ)在RAM中,并在處理器控制下的并行數(shù)據(jù)總線上按順序讀出。
MAX125還包括一個(gè)電壓基準(zhǔn),其無(wú)雜散動(dòng)態(tài)范圍(SFDR)適用于許多高分辨率DSP應(yīng)用。(內(nèi)部基準(zhǔn)可由外部系統(tǒng)基準(zhǔn)覆蓋。MAX125還具有良好的INL(實(shí)際值與理論ADC輸出的最大偏差)、良好的DNL(實(shí)際值與理論ADC階躍幅度的偏差)和13位的單調(diào)性(輸出代碼隨著模擬輸入的增加而增加或保持不變)。為了高效利用微處理器,MAX125提供推挽中斷輸出,指示轉(zhuǎn)換何時(shí)完成。
內(nèi)部緩沖器允許使用內(nèi)部或外部基準(zhǔn)。至于模擬輸入,基準(zhǔn)輸入應(yīng)由低阻抗源驅(qū)動(dòng)。這尤其適用于采用逐次逼近寄存器(SAR)的ADC,因?yàn)榛鶞?zhǔn)電壓直接饋入DAC的R-2R梯形圖。隨著DAC輸入代碼的變化,基準(zhǔn)輸入的輸入阻抗也會(huì)發(fā)生變化,從而調(diào)制基準(zhǔn)電壓。幸運(yùn)的是,MAX125的內(nèi)部緩沖器消除了這個(gè)問(wèn)題。
對(duì)于此設(shè)計(jì),內(nèi)部基準(zhǔn)被外部, 精密、低壓差、低漂移的2.5V電壓基準(zhǔn)(MAX873A)。雖然MAX873A的使用(相對(duì)于內(nèi)部基準(zhǔn))沒(méi)有明顯的結(jié)果變化,但具有更好的初始精度和漂移。
了解任何數(shù)字化系統(tǒng)所需的漂移規(guī)格(以ppm/°C為單位)非常簡(jiǎn)單。首先,定義系統(tǒng)的工作溫度范圍。對(duì)于此應(yīng)用,假設(shè)正常的實(shí)驗(yàn)室溫度范圍為 30°C。 接下來(lái),確定在溫度范圍內(nèi)可以容忍的最大漂移(以伏特為單位)(通常為 1/2 至 1 LSB),從而確定以 V/°C 為單位的漂移。 要將此漂移值歸一化為 ppm/°C,請(qǐng)除以基準(zhǔn)電壓并乘以 106.對(duì)于 2 位系統(tǒng),結(jié)果通常約為 14ppm/°C,對(duì)于 10 位系統(tǒng),結(jié)果通常約為 12ppm/°C,對(duì)于 30 位系統(tǒng),結(jié)果通常約為 10ppm/°C。這些數(shù)字根據(jù)允許的溫度跨度和總基準(zhǔn)漂移而變化。
MAX125由Atmel AVR處理器(AT90S4414)驅(qū)動(dòng),兩款處理器的時(shí)鐘頻率(10MHz)來(lái)自振蕩器模塊。該程序是用匯編語(yǔ)言編寫的,只需一條指令即可切換每條數(shù)據(jù)線,以反映MAX125數(shù)據(jù)資料中的時(shí)序圖。為了便于理解,該程序被劃分為多個(gè)子例程,并且出于相同的目的對(duì)大多數(shù)行進(jìn)行了注釋。
啟動(dòng)或上電復(fù)位時(shí),MAX125采用雙向數(shù)據(jù)引腳D3-D0進(jìn)行配置。將這些引腳設(shè)置為0011,并將WR設(shè)置為低電平,設(shè)置ADC的工作模式,以接收來(lái)自MUX A所有四個(gè)通道的輸入。一旦建立,微處理器端口將重新配置為輸入,以從ADC接收數(shù)據(jù)。
當(dāng)CONVST脈沖為低電平時(shí),處理器等待來(lái)自MAX125的中斷信號(hào)。然后讀出通道1的轉(zhuǎn)換,并將結(jié)果(通過(guò)MAX3100 UART和MAX202E)發(fā)送到PC的RS-232端口。每個(gè)轉(zhuǎn)換包括16位數(shù)據(jù),因此每個(gè)結(jié)果需要兩個(gè)RS-232寫入周期。由于ADC存儲(chǔ)來(lái)自通道2-4的轉(zhuǎn)換,因此傳輸RS-232數(shù)據(jù)所需的時(shí)間可以相當(dāng)悠閑。發(fā)送來(lái)自通道 1 的數(shù)據(jù)后,將對(duì)通道 2-4 重復(fù)此過(guò)程。
在微處理器總線(只有16條數(shù)據(jù)線的14位寬總線)的未使用數(shù)據(jù)引腳上注意到噪聲拾取。如果將這些未使用的引腳配置為輸入,則噪聲會(huì)忠實(shí)地偽裝成間歇性數(shù)據(jù)。然而,幸運(yùn)的是,一個(gè)簡(jiǎn)單的軟件和功能可以濾除感應(yīng)噪聲,他們說(shuō)數(shù)字濾波很難!或者,您可以將未使用的端口配置為輸出。
上述代碼運(yùn)行良好,但建立正確的電路性能可能很困難。來(lái)自μC的中斷脈沖來(lái)得快去得如此之快(在1μs內(nèi)),以至于只有存儲(chǔ)示波器才能檢測(cè)到它。如果沒(méi)有合適的示波器,您可以在 CONVST 線路設(shè)置為高電平后立即插入延遲例程,以便更悠閑地查看中斷信號(hào)。
電腦接口
微處理器與PC連接的關(guān)鍵元件是串行尋址UART(MAX3100)。它通過(guò)其4線SPI從微處理器獲取輸入?/Microwire bus3,并將此數(shù)據(jù)轉(zhuǎn)換為大多數(shù) RS-232 兼容設(shè)備使用的格式。采用工業(yè)標(biāo)準(zhǔn)的微功耗2TX/2RX收發(fā)器(MAX202E)實(shí)現(xiàn)電平轉(zhuǎn)換。
該UART具有硬件和軟件關(guān)斷模式,采用微型QSOP封裝,非常適合低功耗便攜式設(shè)備。對(duì)于危險(xiǎn)環(huán)境,其接口還允許通過(guò)連接合適的光學(xué)設(shè)備進(jìn)行 IrDA 通信。其他特性(本應(yīng)用中不需要)包括接收緩沖器和中斷標(biāo)志,用于提供有關(guān)發(fā)送和接收寄存器的狀態(tài)信息。
實(shí)現(xiàn)基于軟件的SPI例程,用于將代碼導(dǎo)出到缺少內(nèi)置SPI總線的微處理器。代碼表明這是一項(xiàng)微不足道的任務(wù),注釋會(huì)引導(dǎo)外行完成SPI總線的時(shí)鐘周期。如果使用專用SPI端口,值得注意的是,當(dāng)CS置位時(shí),MAX3100的串行時(shí)鐘線(SCLK)必須以低電平狀態(tài)啟動(dòng)。如果此要求出現(xiàn)問(wèn)題,則應(yīng)在進(jìn)入 SPI 例程之前循環(huán) SCLK 線路。
請(qǐng)注意RS-232數(shù)據(jù)傳輸所需的時(shí)間。在 9600 波特時(shí),將 232 位數(shù)據(jù)連同開始位和停止位一起傳輸需要一毫秒以上。事后看來(lái),這是顯而易見的,但它可以給設(shè)計(jì)人員帶來(lái)數(shù)小時(shí)不應(yīng)有的享受,不僅想知道為什么數(shù)據(jù)沒(méi)有正確到達(dá)PC,而且還說(shuō)明了微處理器和RS-10鏈路的運(yùn)行速度差異。在代碼中插入的簡(jiǎn)單 232ms 延遲允許在 PC 端進(jìn)行數(shù)據(jù)傳輸和處理。另請(qǐng)注意,RS-3100規(guī)范沒(méi)有詳細(xì)說(shuō)明信號(hào)協(xié)議(開始和停止位等);僅提供電壓電平、壓擺率和連接器詳細(xì)信息。然而,MAX202和MAX232E處理所有標(biāo)準(zhǔn),使數(shù)據(jù)符合RS-<>,并且符合PC預(yù)期的協(xié)議。
窗口界面?
Windows程序是用Visual Basic Version 6編寫的。它使用 MSComm 函數(shù)從 RS-232 端口獲取讀數(shù),配置為接受文本,并將此數(shù)據(jù)轉(zhuǎn)換為 ASCII。它還將每個(gè)16位數(shù)據(jù)模塊轉(zhuǎn)換回從ADC輸入之前的模擬檢測(cè)電路獲得的電壓和電流測(cè)量值。根據(jù)這些結(jié)果,計(jì)算輸入功率、輸出功率和效率,并將其顯示在PC屏幕上,四舍五入到小數(shù)點(diǎn)后三位。此外,如果需要記錄結(jié)果,系統(tǒng)可以“凍結(jié)”結(jié)果。
測(cè)得的效率數(shù)據(jù)遠(yuǎn)非一致。這是通過(guò)注意到電流和電壓波形上的紋波來(lái)解釋的。4.7kΩ電阻用10nF電容旁路以降低電流紋波讀數(shù),但電阻分壓器網(wǎng)絡(luò)未旁路。因此,測(cè)得的紋波(輸入端20mV,輸出端100mV)導(dǎo)致效率測(cè)量變化±3%。
當(dāng)結(jié)果被讀入PC時(shí),丟失的數(shù)據(jù)會(huì)在PC屏幕上產(chǎn)生不正確的讀數(shù)。因此,測(cè)量了到達(dá)數(shù)據(jù)包之間的時(shí)間間隔。如果任何間隔超過(guò) 0.5 秒,PC 計(jì)數(shù)器將重置,以預(yù)期后續(xù)數(shù)據(jù)包中的第一個(gè)字符。
結(jié)果
被測(cè)器件(DUT)是MAX1705,這是配置為PWM模式的升壓DC-DC轉(zhuǎn)換器。對(duì)評(píng)估板施加負(fù)載,通過(guò)凍結(jié)MAX125 PC程序并從屏幕上讀取數(shù)值來(lái)獲取結(jié)果。然后使用(現(xiàn)已過(guò)時(shí)的)數(shù)字萬(wàn)用表確認(rèn)結(jié)果,并與數(shù)據(jù)表中的圖表給出的預(yù)期效率進(jìn)行比較:
| 負(fù)載/Ω | 文/五 | Iin/A | Vout/V | Iout/A | 效率/% | (有效/%) |
| 16.4 | 3.384 | 0.377 | 4.485 | 0.262 | 92.09 | 95 |
| 50 | 3.451 | 0.123 | 4.478 | 0.086 | 90.8 | 92 |
| 100 | 3.498 | 0.064 | 4.471 | 0.042 | 83.9 | 83 |
| 390 | 3.545 | 0.021 | 4.485 | 0.009 | 54.054 | 56 |
校準(zhǔn)、誤差和調(diào)整
盡管數(shù)字純粹主義者可能會(huì)有不同的論點(diǎn),但模擬板布局必須無(wú)可挑剔才能獲得最佳電路性能。模擬IC的所有電源軌都應(yīng)較粗,并使用物理上靠近器件的電容器接地:至少1uF(鉭)與100nF(陶瓷)并聯(lián)。應(yīng)包括一個(gè)良好的接地層,特別是在MAX471周圍,因?yàn)楦哳l、高幅度電流占據(jù)了該區(qū)域。MAX4上的7.471kΩ電阻應(yīng)為低電感的精密類型,因?yàn)檫@些元件的任何容差都會(huì)直接影響結(jié)果。所有模擬PCB走線應(yīng)盡可能短,遠(yuǎn)離數(shù)字線。MAX125基準(zhǔn)放大器的輸入和輸出端應(yīng)去耦,靠近IC。理想情況下,該板應(yīng)包含單獨(dú)的模擬和數(shù)字接地層,連接在一個(gè)點(diǎn)上。
據(jù)觀察,10MHz時(shí)鐘出現(xiàn)在意想不到的地方,因此,如果要通過(guò)印刷電路板路由該信號(hào),則應(yīng)在物理上遠(yuǎn)離模擬輸入,尤其是電阻網(wǎng)絡(luò),并且中間有接地軌道。為了進(jìn)一步降低噪聲輻射,可以對(duì)該信號(hào)進(jìn)行濾波以消除時(shí)鐘諧波,并使用靠近處理器和ADC的簡(jiǎn)單數(shù)字門進(jìn)行重構(gòu)。'74HC00 非常適合此目的。
要獲得絕對(duì)直流精度,應(yīng)考慮許多因素。例如,MAX873A基準(zhǔn)具有出色的漂移特性,但其初始精度(±1.5mV)在10位系統(tǒng)中誤差為±14LSB。該誤差可以通過(guò)在輸出微調(diào)引腳和地之間連接微調(diào)電位器來(lái)調(diào)整。建議在輸入和輸出電阻分壓器上切換基準(zhǔn)電壓,并將輸入信號(hào)讀取至ADC。通過(guò)此讀數(shù),您可以確定電阻分壓器鏈中的誤差并實(shí)現(xiàn)軟件偏移。
為了精確校準(zhǔn)電流檢測(cè)放大器,必須在向輸入和輸出施加電流源時(shí)獲取ADC讀數(shù),從而獲得電流放大器和輸出電阻中的誤差。該電流源應(yīng)設(shè)置為最小預(yù)期電流讀數(shù),因?yàn)镸AX471在低電流時(shí)的主導(dǎo)誤差是由內(nèi)部運(yùn)算放大器貢獻(xiàn)的輸入失調(diào)電壓引起的。
結(jié)論
所討論的系統(tǒng)由一系列電路模塊構(gòu)建而成,每個(gè)模塊都經(jīng)過(guò)單獨(dú)測(cè)試。該設(shè)計(jì)程序消除了與系統(tǒng)初始上電相關(guān)的許多張力。所得結(jié)果與MAX1705數(shù)據(jù)資料所示的結(jié)果一致。有關(guān)本設(shè)計(jì)所用元件的更多詳細(xì)信息,請(qǐng)?jiān)L問(wèn)ADI公司網(wǎng)站。網(wǎng)站上還提供 zip 文件 (A201code.zip) 的完整列表,其中包含 Atmel 微處理器 (MAX125.asm) 的匯編語(yǔ)言代碼,以及運(yùn)行 PC Windows 顯示器所需的 Visual Basic 6 程序模塊。
審核編輯:郭婷
-
轉(zhuǎn)換器
+關(guān)注
關(guān)注
27文章
8925瀏覽量
150484 -
數(shù)據(jù)采集
+關(guān)注
關(guān)注
40文章
6859瀏覽量
115532 -
DC-DC
+關(guān)注
關(guān)注
30文章
2077瀏覽量
83290
發(fā)布評(píng)論請(qǐng)先 登錄
振弦式土壓力計(jì)的數(shù)據(jù)采集方法
labview進(jìn)行的數(shù)據(jù)采集
數(shù)據(jù)采集儀是如何進(jìn)行數(shù)據(jù)采集分析 如何工作的 工程監(jiān)測(cè)數(shù)采儀
Newport 光功率計(jì) 1830-c數(shù)據(jù)采集?問(wèn)題
使用tcp協(xié)議進(jìn)行數(shù)據(jù)采集問(wèn)題
用模塊高速數(shù)據(jù)采集卡進(jìn)行功率測(cè)量
傳感器數(shù)據(jù)采集/總線數(shù)據(jù)采集記錄知識(shí)分享
數(shù)據(jù)采集系統(tǒng)中Windows CE.Net 的幾種外設(shè)接口編
如何更好地進(jìn)行數(shù)據(jù)采集
基于Windows CE的地形圖數(shù)據(jù)采集系統(tǒng)開發(fā)
數(shù)據(jù)采集系統(tǒng)中Windows CENet的幾種外設(shè)接口編程方法
使用PCI總線設(shè)計(jì)高速數(shù)據(jù)采集系統(tǒng)的資料說(shuō)明
基于PIC總線的高速數(shù)據(jù)采集系統(tǒng)
設(shè)備數(shù)據(jù)采集網(wǎng)關(guān)如何連接設(shè)備進(jìn)行數(shù)據(jù)采集工作
振弦式位移計(jì)的數(shù)據(jù)采集頻率可以調(diào)整嗎?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論