

以下文章將介紹Maxim新型LO緩沖器/分路器系列MAX9987和MAX9990的特性和功能。本文介紹了指定的參數及其對蜂窩基站等系統應用的重要性和影響,并以實際應用電路結束,該電路配置緩沖器/分配器電路以調整模擬和數字輸出功率電平以及補償溫度波動。
介紹
在當今競爭激烈的市場中,無線基站設計人員面臨著降低產品成本同時保持卓越無線電性能的艱巨任務。通過減少DM(直接材料)支出、零件數量、設計時間、性能可變性以及設計系統故障,可以降低成本。與此同時,蜂窩運營商需要更高密度的系統,將兩到四倍的硬件封裝到當前基站的占用空間中。
一種常見的解決方案是在整個接收和發送陣容中采用更高程度的電路集成。MAX9987/MAX9990系列LO緩沖器/分路器就是為了這一目標而設計的。這些組件通過提供出色的 P 提高了 LO 驅動器陣容的性能外方差控制、隔離和噪聲性能 - 優化無源混頻器設計的所有關鍵參數。
下面概述了典型的LO驅動電路,并描述了MAX9987/MAX9990系列器件如何針對幾乎任何LO驅動應用進行優化。
與LO驅動器設計相關的挑戰
典型的LO系列需要一個緩沖放大器來隔離和驅動無源混頻器與輸出功率相對較低的VCO。大多數無源混頻器需要+14dBm至+20dBm的驅動電平。然而,VCO信號的簡單放大不足以優化混頻器性能。任何LO系列的一個關鍵要求是,無論溫度、電壓和VCO驅動變化如何,都要保持標稱驅動電平。未能控制LO驅動器差異會導致接收器靈敏度和IP3性能下降。對于發射鏈,LO驅動差異也會影響輸出功率、IP3和相應的ACPR。
LO驅動電路中遇到的大多數差異與VCO的輸出特性直接相關。VCO的輸出功率通常變化高達±3dB,具體取決于溫度、頻率和器件間的差異。表 1 詳細介紹了這些差異貢獻者中的每一個。
| 參數 | 參數 范圍 | 典型 功率差異 |
| 溫度 | -40°C 至 +85°C | ±0.5分貝至±1分貝 |
| 頻率 | ±30兆赫 | ±0.5分貝至±1分貝 |
| 部件間差異 | ±1分貝至±2分貝 | |
| 總方差 | 溫度、頻率和元件間 | ±2分貝至±3分貝 |
如圖所示,VCO器件間的差異是LO驅動電路功率差異的最重要因素。然而,一個好的LO驅動電路試圖用一個通用的解決方案來解決所有差異。
傳統解決方案
分立解決方案通常用于當今的高功率分集和單分支LO驅動電路(見圖1)。這些電路中的絕大多數使用至少一個放大器,該放大器被硬驅動到飽和狀態。通過將安培推入壓縮狀態,無論P的變化如何,都能提供相對穩定的輸出驅動水平在、溫度和電源電壓。
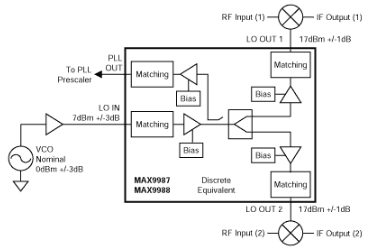
圖1.使用MAX9987/MAX9988 LO緩沖器/分路器的典型應用電路
然而,這些分立式解決方案的缺點是它們相對笨重,特別是當設計人員使用集總或分布式Wilkinson分路器作為功率分配器的表示時。此外,如表2所示,器件數量可能很重要。
| 元件 | 馬克西姆器件數量 | 競爭解決方案部件數 |
每個零件 的空間(平方毫米) |
Maxim解決方案的空間(mm2) | 競爭解決方案的空間(mm2) | 平均 每個零件的成本 | 馬克西姆成本 | 競爭解決方案成本 | 節約成本 |
| C | 14 | 16 | 3.75 | 52.5 | 60 | $0.01 | $0.14 | $0.16 | $0.02 |
| L | 0 | 9 | 7.7 | 0 | 69.3 | $0.04 | $0.00 | $0.36 | $0.36 |
| R | 5 | 4 | 3.75 | 18.75 | 15 | $0.005 | $0.03 | $0.02 | -0.01 美元 |
| 安培 | 0 | 4 | 18.5 | 0 | 74 | $1.10 | $0.00 | $4.40 | $4.40 |
| 分配器 | 0 | 1 | 31 | 0 | 31 | $1.25 | $0.00 | $1.25 | $1.25 |
| MAX9987/MAX9988 | 1 | 0 | 25 | 25 | 0 | ||||
| 總 | 20 | 34 | 96.25 | 249.3 | $6.03 |
MAX9987/MAX9990替代方案
如圖1所示,MAX9987/MAX9988取代了四個分立放大器、一個無源分路器和耦合器,以及數十個偏置元件。這種高集成度使設計人員能夠將LO驅動電路的整體尺寸減小2.5倍,同時將器件數量減少多達41%。表2更詳細地介紹了該器件與其分立等效器件的對比情況。
這些組件非常適合蜂窩/GSM/DCS/PCS 和 UMTS 基站應用,在這些應用中,分集發射和接收陣容需要雙、高級 LO 驅動器。單路輸出版本,即MAX9989/MAX9990,同樣可用于單支路系統。每個器件的核心是片內緩沖電路,該電路提供40dB的輸出至輸入隔離度以防止LO牽引,并提供30dB的輸出至輸出隔離度,以減少分支間干擾。另外,MAX9987/MAX9990具有板載PLL放大器,為預分頻器反饋提供方便的+3dBm輸出。MAX9987/MAX9990系列的每個成員都采用非常小、引腳兼容的5mm x 5mm QFN-20封裝。
MAX9987/MAX9990的標準配置
MAX9987–MAX9990系列LO緩沖器/分路器專門設計用于在整個溫度(-1°C至+40°C)范圍內提供優于±85dB的LO驅動控制,P在(±3dB) 和 V供應(5±0.25V);所有這些都無需使用外部校準或控制。
圖2描繪了P之間的基本關系外和 P在用于MAX9987/MAX9990的典型應用電路。如圖所示,該器件能夠在相對較大的P上提供±1dB的方差控制在擺幅為 ±3dB。設計人員的任務是提供標稱水平 P在用于MAX9987/MAX9990。確定此標稱水平后,所有方差控制(包括部件間差異), 由 IC 直接處理。
圖2.MAX9987/MAX9990輸出功率特性采用典型應用電路(標稱P外設置為 +17dBm)。
標稱輸出電平為+17dBm,如圖2所示。但請注意, MAX9987/MAX9990還具有一個特性,設計人員可以通過實現四個外部偏置電阻來精確設置輸出功率電平。實際上,這些電阻決定了芯片內部放大器的偏置程度。指定的輸出功率電平可在+14dBm至+20dBm范圍內調節,具體取決于所選的電阻設置。(參見圖3;MAX9987/MAX9990數據資料也可提供其它細節)。
圖3.P外使用MAX9987/MAX9990偏置功能進行電平控制
利用MAX9987/MAX9990的偏置特性補償LO驅動電路中的器件間變化
對于大多數LO驅動應用,±1dB的方差控制足以優化混頻器性能。但是,在某些情況下,設計人員可能會發現將此方差限制在更低的限值是可取的。
下面介紹的技術通過擴展MAX9987/MAX9990的功能,使標稱輸出電平精確到0.05dB以內,從而迎合了這種應用。這種調整允許設計人員校準導致輸入驅動電平差異的器件間差異。在典型的LO驅動電路中,VCO的器件間變化為±2dB,可以完全消除。剩下的只是一個非常可管理的增量,在整個溫度和電壓范圍內小于±0.5dB,以P的校準值為中心。外.
校準過程由MAX9987/MAX9990的可編程P提供。外特征。無需使用固定電阻,而是可以通過施加到基準引腳的電壓直接控制輸出功率。這種類型的控制提供了隨時修改輸出功率的選項,并適合在校準測試期間實施的動態調整。所提出的方法如圖4所示,允許在生產環境中測試和設置輸出功率電平。本文末尾建議了其他可能的實現。
圖4.MAX9989/MAX9990(單路輸出版本)的RF檢測和DAC功率控制電路。
出于演示目的,設計目標如圖4所示 用于在MAX17上設置(高精度)9989dBm的輸出功率電平。其他輸出功率電平也是可能的,具體取決于施加到基準引腳的偏置電平。此外,該技術可應用于MAX9987/MAX9990系列的任何成員。
為了測試該電路,使用+7dBm恒定在900MHz的RF源來驅動MAX9989。圖5顯示了該特定電路中RF輸出與DAC電壓的測量傳遞函數。該電路的實驗室測量表明,MAX9989的輸出功率可以微調,精度為0.05dB。應該注意的是,對于該特定電路,17dBm的標稱電平(輸送到負載)對應于320mV的DAC電壓。校準端口上使用的耦合器從MAX7分接-4.9989dBm的功率,因此設計人員需要將器件上的偏置驅動得更高一些,以補償0.3dB耦合器損耗。
圖5.測得的MAX9989的RF功率與控制電壓的關系。
下面列出了圖 4 中所示實現的一些關鍵發現:
DAC選擇:如果使用10位DAC設置0至1.25V之間的電壓,則控制分辨率為:

控制約為0.02dB/mV,因此分辨率實際上為0.02dB(這對于我們0.05dB控制的目標來說綽綽有余)。可以使用8位DAC來提供足夠的分辨率,具體取決于應用的目標。為簡化測量,圖5所示曲線使用集成在MAX1407中的DAC(片上數據采集系統)生成。其他獨立DAC,如2通道、3線接口、8位MAX519,也適用于這種類型的控制。
DAC基準:圖1407中使用的MAX4具有1.25V內部基準,用于Maxim的內部測試。如果使用花樣DAC,可以使用MAX9989的內部1.5V基準源(器件第5引腳提供)。
低通濾波器:低通濾波器用于抑制飽和放大器產生的任何二階或高次諧波分量。直接測量負載RF功率時,還應使用低通濾波器。在這種情況下,使用了2MHz同軸濾波器。
其他變體
還可以進一步增強圖4中的電路;下面提出了四種其他可能性:
將輸出功率設置為17dBm以外的電平:設計人員可能希望將輸出功率精確設置為+14至+17dBm之間的電平。為此,將引腳6(BIASIN)連接到圖2所示的電阻R4和R4。建議的R2和R4值見MAX1數據資料表9989。
寬范圍功率變化:在寬范圍內調整MAX9987/MAX9990的功率電平可能比在特定電平上設置精度更有意義。如上所述,該器件的輸出功率電平可在+14至+20dBm范圍內調節。DAC控制可用于通過用戶控制實現這些輸出功率電平。為了擴展控制范圍,建議提高或降低引腳6和7上的偏置電壓,而不是僅提高或降低引腳7上的偏置電壓。由于每個引腳需要不同的偏置,因此建議設計人員在此實現中使用兩個獨立的DAC。有關施加到引腳 3 和 6 的理想電壓的詳細信息,請參閱圖 7。
溫度控制:用量P外如果設計人員能夠考慮環境溫度的變化,則可以進一步減小方差。如圖6和圖7所示,可以將溫度傳感器連接到MAX9989的偏置控制。可以實現正或負溫度斜率,允許用戶設置功率/溫度曲線,以提取下一個RF級的最佳質量。
圖6.使用數字技術進行溫度補償。
圖7.使用模擬技術進行溫度補償。
實時閉環控制回路:可以采用閉環控制系統來提高精度。圖8顯示了使用模擬集成電路的一種可能實現方案。
圖8.模擬閉環控制。
結論
無論采用何種方案,MAX9987/MAX9990都是提供具有出色性能的高電平LO驅動的理想器件。外差異控制。通過使用這些器件,基站設計人員可以顯著提高其LO驅動電路的性能,同時僅使用當前元件數量和電路板占位面積的一小部分。這些進步將幫助設計人員滿足當今基站運營商日益增長的需求。
審核編輯:郭婷
-
放大器
+關注
關注
145文章
13990瀏覽量
215522 -
緩沖器
+關注
關注
6文章
2023瀏覽量
46253 -
VCO
+關注
關注
13文章
224瀏覽量
69794
發布評論請先 登錄
相關推薦
高線性度低LO泄漏基站RxTx混頻器MAX2043資料推薦
815MHz至1000MHz下變頻混頻器MAX9986A相關資料推薦
MAX9987, MAX9988 pdf datasheet
MAX19996 具有片內LO緩沖器的完全集成、2000MH
CMY210集成LO緩沖器的超線性混頻器詳細資料免費下載
ADL5355:1200 MHz至2500 MHz平衡混頻器、LO緩沖器、中頻放大器和RF巴倫數據表

ADL5367:500 MHz至1700 MHz平衡混頻器、LO緩沖器和RF Balun數據表
ADL5353:2200 MHz至2700 MHz平衡混頻器、LO緩沖器、中頻放大器和RF巴倫數據表
ADL5369:300 MHz至1100 MHz平衡混頻器、LO緩沖器和RF巴倫數據表
ADL5354:2200 MHz至2700 MHz、雙平衡混頻器、LO緩沖器、中頻放大器和RF巴倫數據表
ADL5357:500 MHz至1700 MHz平衡混頻器、LO緩沖器、中頻放大器和RF巴倫數據表
ADL5365:1200 MHz至2500 MHz,平衡混頻器、LO緩沖器和RF巴倫數據表
ADL5358:500 MHz至1700 MHz、雙平衡混頻器、LO緩沖器、中頻放大器和RF巴倫數據表
ADL5363:2300 MHz至2900 MHz平衡混頻器、LO緩沖器和RF Balun數據表
ADL5355 1200 MHz至2500 MHz平衡混頻器、LO緩沖器、中頻放大器和RF巴倫數據表





 工商網監
工商網監

評論