 蝠鲼仿生柔軟機器魚
蝠鲼仿生柔軟機器魚
這篇文章來源于DevicePlus.com英語網站的翻譯稿。
?Tiefeng Li等人,2017
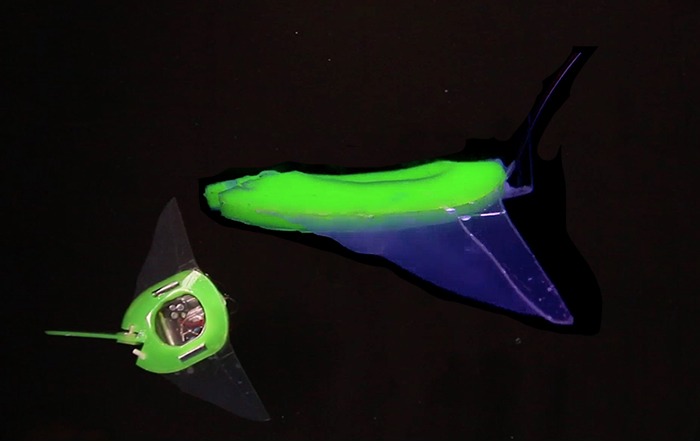
柔軟機器人正逐漸成為機器人領域的新熱門。最近,來自中國杭州浙江大學的工程師團隊研發了一種蝠鲼仿生機器魚,其板載系統十分完整,包括供電和遙控等部分。機器魚體長9.3厘米(加上尾巴18.5厘米),重量只有90.3克,單次電池充電后能在水中游3個小時之久。柔軟機器魚為許多未來的應用領域帶來了希望,比如在復雜的海洋環境中監測水質或發現新的海洋生物。
傳統機器人由剛性材料制成,這些材料通常會限制機器人的變形能力以及讓自身形狀適應外部環境的能力。雖然這些剛性機器人具有輸出力大、精度高、可控性強等優點,但是往往缺乏自然生物的多功能特性。另一方面,柔軟機器人可以實現彈性變形,并且能夠通過狹窄空間而不會導致內部損壞。
許多柔軟機器人由剛性電機或者刺激響應型軟執行器驅動。而后者的輕便性、靈活性和緊湊性使其更適用于柔軟機器人。軟執行器的種類很多,比如形狀記憶合金(SMA)、介電彈性體(DE)、響應性水凝膠和活細胞。本文中的蝠鲼仿生機器人通過DE和離子導電水凝膠驅動,這與由透明水凝膠制成的柳葉鰻仿生柔軟水凝膠偽裝機器人有些類似。DE以迅速的響應速度以及較大的動作著稱,但是這種材料對高電壓和厚絕緣的要求限制了它們在基于軟啟動器的機器人中的應用。為了減輕這種不便,研究人員決定使用周圍的開放水域(“弱而充分”的電導率)作為電極,從而解決了進一步絕緣的需要。

圖1. 柔軟機器魚的制作 /?Tiefeng Li等人,2017
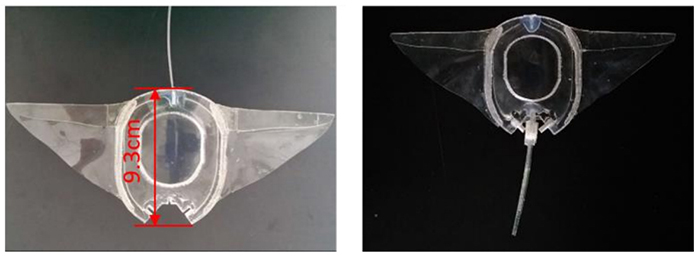
圖2. 通過硅膠固化制作的柔軟魚身(左);柔軟魚身上的尾巴 /?Tiefeng Li等人,2017
機器魚的肌肉由DE膜構成;翅片由薄硅膜構成;柔軟的彈性身體由硅膠框構成。魚身還連接了一條帶有嵌入式電磁鐵的硅膠魚尾,以便進行轉向。
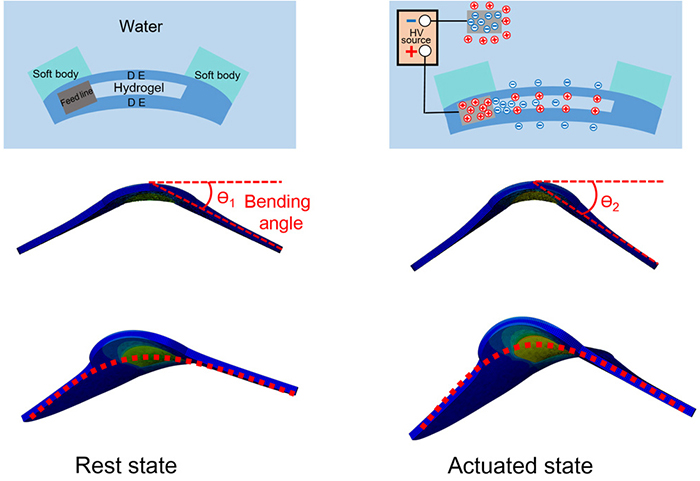
圖3. 拍打胸鰭的致動機制 /?Tiefeng Li等人,2017
DE膜內部是水凝膠,而水凝膠與離子導電電極(饋線)連接相連。向電極施加電壓時,電場會驅動周圍水中的離子以及水凝膠。正電荷和負電荷積聚在DE膜的兩側,請參見圖3的第2張示意圖。水凝膠帶正電的邊緣被吸引至DE膜外部水中帶負電荷的電子,當這些粒子彼此吸引時,它們會擠壓之間的部分,導致DE膜變形(致動狀態)。停止供電后,機體返回其原始配置(靜止狀態)。如果提供循環電壓,那么機器魚就會像游泳的蝠鲼一樣上下擺動翅片。
翅片的上下擺動會引發軟硅膠膜的波動運動,從而實現下面視頻所示的正向推進。機器魚動作時(即用線連接一個放大的AC電壓信號)會產生一個推力。其游泳速度取決于施加電壓的幅度和頻率。當施加電壓的幅度和頻率分別為10 kV和5 Hz時,機器魚的最大速度為13.5 cm/s。
對于無線系統,該團隊研發了一種名為“Epod”的電子艙,里面含有一個高壓放大器、一塊鋰離子電池以及紅外(IR)遙控電路。Epod的重量為47.8克,其內部剛性組件封裝在硅膠中。然后,設計人員將Epod粘在魚體下方。
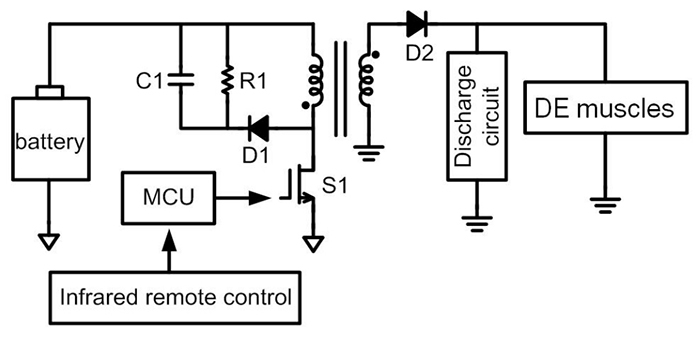
圖4. Epod中高壓放大器電路圖 /?Tiefeng Li等人,2017
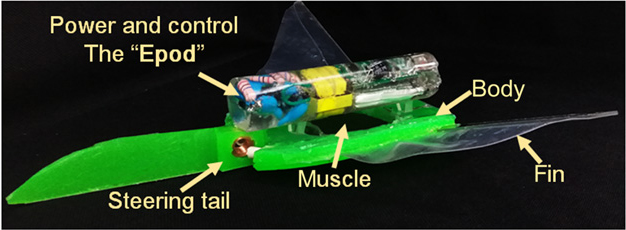
圖5. 無線柔軟機器魚 /?Tiefeng Li等人,2017
憑借一塊3.7 V 450 mAh鋰電池,單次充電后,機器魚能夠以1.1 cm/s的速度游3.15小時;以3.1 cm/s的速度游1.5小時。此款無線機器人的最大前進速度為6.4 cm/s(9.5 kV和5 Hz)。速度降低的主要原因是總重量增加(從42.5克升至90.3克)以及Epod的額外阻力。另外,配備有攝像機的機器人還可以通過遠程IR控制進行掉頭(本文的第一個視頻)。
由于該機器人的高適應性和高敏捷性,它甚至可以在極端溫度條件下游泳(比如0.4°C至74.2°C),不需要添加保溫措施。該機器人還展示出卓越的偽裝能力,它可以很容易地融入到背景中,幾乎看不到。

Yulhane-Jerez Koh
Yulhane畢業于加州大學伯克利分校(UC Berkeley),是一名生物力學工程師,同時也是美國deviceplus公司的執行編輯。Yulhane的主要興趣在于群體機器人、機器學習和神經科學領域。
審核編輯黃宇
-
機器人
+關注
關注
211文章
28380瀏覽量
206919 -
電池
+關注
關注
84文章
10560瀏覽量
129480
發布評論請先 登錄
相關推薦
大象機器人11月大事件回顧
月泉仿生完成近億元Pre-A輪融資
安泰功率放大器如何驅動20kHz水聲換能器超聲驅魚


ATA-L8水聲功率放大器在超聲驅魚中的作用是什么

柔軟可拉伸的新型3D打印材料可改善可穿戴傳感應用
小米機器人公司獲亦莊國投增資,專注仿生機器人技術創新
小米機器人入駐小米汽車工廠,已研發鐵大、鐵蛋等機器人
北航成功研發微尺寸仿生機器人——昆蟲機器人
上海海洋大學研發的“文鰩”智能仿生魚,重35斤,翼展1米,水域暢游
底層硬件加大模型,智能機器狗拓展更多落地應用
銀牛微電子3D視覺感知方案賦能小米CyberDog系列仿生四足機器人
ATA-4051高壓功率放大器在仿生水下聲接收器設計中的應用
水下仿生光磁導航技術的發展趨勢探討






 工商網監
工商網監
評論