") 敏捷彈跳機(jī)器人SALTO
敏捷彈跳機(jī)器人SALTO
這篇文章來源于DevicePlus.com英語網(wǎng)站的翻譯稿。
?UC Berkeley
加州大學(xué)伯克利分校研發(fā)了一款彈跳機(jī)器人,其垂直跳躍高度比大多數(shù)普通人類都高,并且還可以利用墻壁跳躍,彈離墻面落到另一個平臺。SALTO這個名字再合適不過了,因為這個詞表示翻越障礙地形的騰空運(yùn)動。在拉丁語中,SALTO的意思也是“跳躍”。
參觀了位于加利福尼亞州門洛帕克市的FEMA城市搜索和救援培訓(xùn)站之后,加州大學(xué)伯克利分校機(jī)器人博士生Duncan Haldane與其團(tuán)隊構(gòu)建了這種專為搜索和救援設(shè)計的機(jī)器人。SALTO小巧而輕便,在地震、火災(zāi)等不幸事件毀壞建筑物后,該機(jī)器人將能夠幫助人們克服在廢墟礫中尋找生命跡象遇到的各種挑戰(zhàn)和困難。
在機(jī)器人研發(fā)過程中,該團(tuán)隊公布了一項研究,其目的是評估利用具有機(jī)械效益適應(yīng)的機(jī)器人串聯(lián)彈性致動器增加機(jī)器人垂直跳躍敏捷性的可行性。研究工作表明,機(jī)械效益(MA)適應(yīng)(其定義為腳部反作用力與致動器施加力之間的比值)可以增加串聯(lián)彈性肌腱復(fù)合體傳遞的能量。SALTO采用了一種具有MA適應(yīng)(SE+MA)的機(jī)器人串聯(lián)彈性致動器,事實證明,該結(jié)構(gòu)能夠有效積蓄能量并提供更大能量,實現(xiàn)更高跳躍,從而提高垂直跳躍敏捷度。
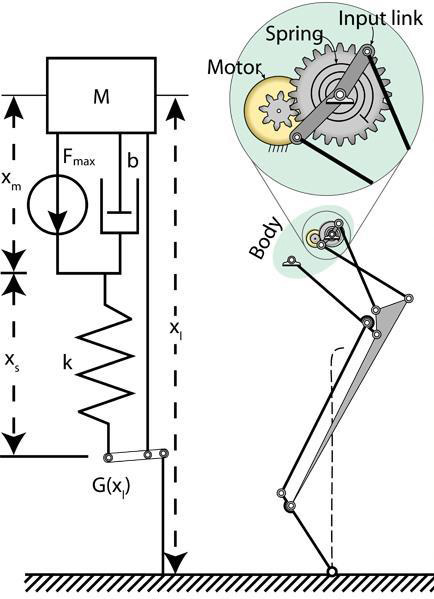
圖1.SALTO 的能量調(diào)制;圖中左側(cè)為能量調(diào)制系統(tǒng)模型(SE+MA),右側(cè)為機(jī)器人構(gòu)造示意圖。/ ?Haldane等,2016
設(shè)計靈感
Haldane研發(fā)SALTO模型的靈感來自動物世界。經(jīng)過自然選擇,動物們進(jìn)化出了許多逃離捕食者的特殊能力。其中,引起Haldane注意的是嬰猴,這種夜間靈長目動物能夠在4秒鐘內(nèi)連續(xù)跳躍5次之多。跳躍之前,它們首先會下蹲。嬰猴的最大垂直跳躍速度為2.2米/秒,而SALTO的速度為1.75米/秒,這打破了之前的機(jī)器人敏捷性紀(jì)錄(1.12米/秒)。
嬰猴的蹲伏行為有助于將能量儲存在肌腱中,從而實現(xiàn)更好的跳躍效果。他們蹲下的時間越長,積蓄的能量就越多。將勢能轉(zhuǎn)化為動能的這種機(jī)制被稱為能量調(diào)制。這是自然界中的一種適者生存現(xiàn)象,在生物力學(xué)文獻(xiàn)中也被稱為能量放大。
得益于針對動物和機(jī)器人系統(tǒng)設(shè)計的新跳躍度量和簡單計算,SALTO展現(xiàn)了前所未有的敏捷性。Haldane及其團(tuán)隊將垂直跳躍敏捷性描述為“一個系統(tǒng)克服地球重力單次跳躍達(dá)到的高度乘以跳躍頻率”。垂直運(yùn)動,比如攀爬或撲動,可以用以下公式表示:
垂直跳躍敏捷性(米/秒)= h/(tstance + tapogee),
其中h=跳躍高度;tstance=跳躍開始后的總站立時間;tapogee=跳躍者離開地面直到達(dá)到跳躍最高點(垂直速度為零)的飛行時間。
由于考慮了重力,垂直跳躍敏捷性受限于動力重量比,只表示“動物能夠改變多少能量狀態(tài)以及變化速度”,不考慮方向的改變或轉(zhuǎn)向行為。
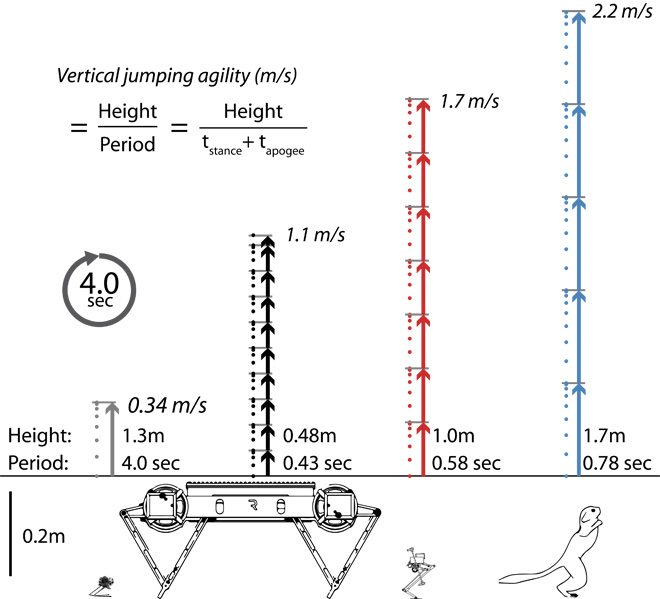
圖2. 多種最敏捷系統(tǒng)在4秒鐘內(nèi)進(jìn)行的一系列重復(fù)垂直跳躍(從左到右):平行彈性(EPFL跳躍者)、剛性跳躍(Minitaur機(jī)器人)、串聯(lián)彈性能量調(diào)制(SALTO)和嬰猴(Galagosenegalensis)。每個箭頭表示一次跳躍。/ ?Haldane等,2016
機(jī)器人物理原型
Haldane利用驅(qū)動彈簧的電機(jī)將該機(jī)構(gòu)集成到機(jī)器人中,通過腿部機(jī)構(gòu)加載能量,以形成嬰猴的那種蹲伏。通過這種方式,SALTO能夠達(dá)到比單次跳躍更高的高度。
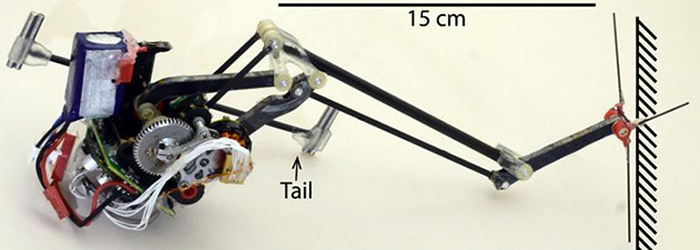
圖3.組裝好的嬰猴機(jī)器人,Salto / ?Haldane等,2016
該機(jī)器人由ImageProc PCB、一個六軸慣性測量單元 (https://github.com/biomimetics/imageproc_pcb; 固件: https://github.com/dhaldane/roach), 兩個位置傳感器(ams AS5047P & AS5048B)、無刷電機(jī)(Scorpion S-1804-1650KV)、無刷直流電機(jī)驅(qū)動器(Advanced Motion Controls AZB10A4)組成,并由一塊三芯11.1V 180 mAh鋰聚合物電池供電。腿部鏈接由碳纖維復(fù)合材料制成,比如蜂窩芯碳纖維和FR4玻璃纖維。旋轉(zhuǎn)關(guān)節(jié)通過2024精密鋁合金底棒(McMaster-Carr 9062K24)與聚合物襯套(igusInc JFM-0304-05)連接,而襯套和軸通過模塑聚氨酯組件(Innovative Polymers IE-3075)與碳纖維結(jié)構(gòu)集成在一起。
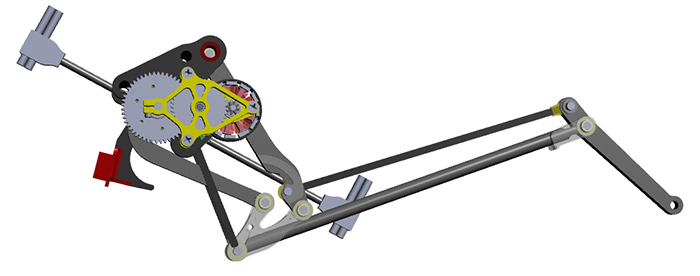
圖4.無需電子控制裝置的聯(lián)合機(jī)構(gòu)圖 / ?Haldane等,2016
SALTO是單腿機(jī)器人,由一個進(jìn)行能量調(diào)制的聯(lián)動裝置、一個串聯(lián)彈性致動器以及一個進(jìn)行姿態(tài)控制的慣性尾部組成。其重量僅為100克(3.5盎司),完全伸展時身高為26厘米(10.2英寸),垂直跳躍敏捷性能夠達(dá)到嬰猴的78%。雖然有些機(jī)器人單次跳躍高度高于SALTO,但是SALTO仍是垂直方向上最敏捷的機(jī)器人。
控制板以1000 Hz的頻率測量機(jī)器人的身體角度、腿部位置和電機(jī)位置,并可以通過板載ZigBee用筆記本電腦控制。系統(tǒng)采用兩路獨立的線性反饋回路:“針對電機(jī)位置的比例控制器和針對身體角度的比例微分控制器”。身體角度通過一個單軸陀螺儀估算。用于彈離墻面的控制器是一個狀態(tài)機(jī)。控制器啟動時,將俯仰設(shè)定值設(shè)為機(jī)器人向前朝向墻面的角度。當(dāng)俯仰角達(dá)到一定閾值時,機(jī)器人觸發(fā)腿部伸展,形成跳躍。在空中,機(jī)器人將其腿部縮回,俯仰設(shè)定點設(shè)定為機(jī)器人接觸墻面的角度。
測量/實驗
該團(tuán)隊進(jìn)行了多次實驗,以確定機(jī)器人可以實現(xiàn)的最大高度增益和垂直跳躍敏捷性,比如運(yùn)動時的墻面彈跳。對于垂直跳躍測試,他們將機(jī)器人放置在地板上,質(zhì)心位于腳部正上方,然后用一個步進(jìn)輸入將跳躍連桿驅(qū)動到完全伸展。為了防止受控落地,這些試驗沒有激活機(jī)器人的尾部。
然后,他們進(jìn)行了墻壁彈跳試驗,機(jī)器人從地面跳到墻上,然后從墻面上彈離,整個過程中使用尾部進(jìn)行定向。
實驗墻面是一塊0.25英寸厚的丙烯酸板,安裝在擠壓鋁框架上。為了增加摩擦力,他們在地板上方0.88米處增加了一塊直徑為0.175米、0.25英寸厚的聚氨酯橡膠,作為機(jī)器人的墊腳之處。
這種來自生物學(xué)靈感的結(jié)構(gòu)將會啟發(fā)更多的人。此外,該團(tuán)隊希望繼續(xù)探索新的行為,比如人類跑酷模型。跑酷也被稱為自由飛躍,跑酷者利用自身運(yùn)動跨越各種障礙物,比如墻壁、樓梯或建筑物之間的空隙。該團(tuán)隊希望能夠形成一系列連續(xù)跳躍的擴(kuò)展行為,以達(dá)到人們之前無法企及的運(yùn)動極限。

Yulhane-Jerez Koh
Yulhane畢業(yè)于加州大學(xué)伯克利分校(UC Berkeley),是一名生物力學(xué)工程師,同時也是美國deviceplus公司的執(zhí)行編輯。Yulhane的主要興趣在于群體機(jī)器人、機(jī)器學(xué)習(xí)和神經(jīng)科學(xué)領(lǐng)域。
審核編輯黃宇
-
機(jī)器人
+關(guān)注
關(guān)注
212文章
28933瀏覽量
209705 -
電機(jī)
+關(guān)注
關(guān)注
143文章
9142瀏覽量
147019
發(fā)布評論請先 登錄
相關(guān)推薦
【書籍評測活動NO.58】ROS 2智能機(jī)器人開發(fā)實踐
海爾智家成立機(jī)器人科技公司
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗】2.具身智能機(jī)器人的基礎(chǔ)模塊
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗】2.具身智能機(jī)器人大模型
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗】1.初步理解具身智能
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗】+初品的體驗
《具身智能機(jī)器人系統(tǒng)》第1-6章閱讀心得之具身智能機(jī)器人系統(tǒng)背景知識與基礎(chǔ)模塊
鴻蒙機(jī)器人與鴻蒙開發(fā)板聯(lián)動演示
開源項目!用ESP32做一個可愛的無用機(jī)器人
開源項目!用ESP32做一個可愛的無用機(jī)器人
柔性機(jī)器人與剛性機(jī)器人區(qū)別與聯(lián)系






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論