
 三相缺相保護器的工作原理及特點
三相缺相保護器的工作原理及特點
三相缺相保護原理
概述:
三相缺相、相序錯誤保護器是為三相電源缺相或錯相引起三相系統故障而設計的保護器,主要應用在三相系統異常可能引起工業生產發生嚴重事故的場所,比如相序錯誤影響并網逆變器設備正常工作,電氣控制電動機反轉等。
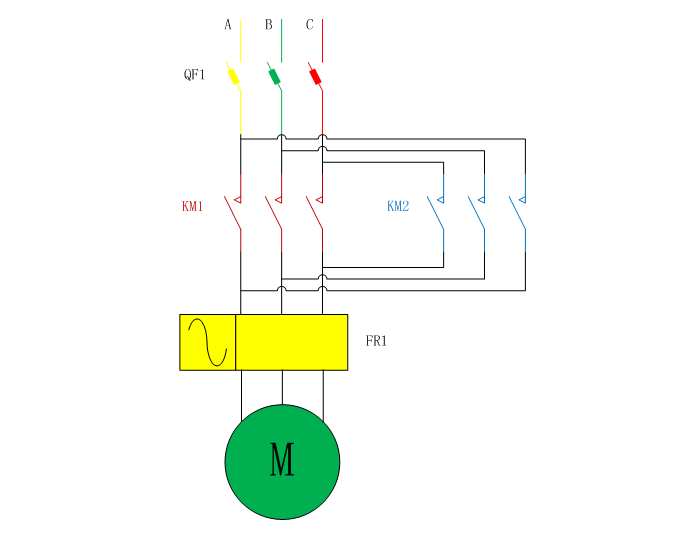
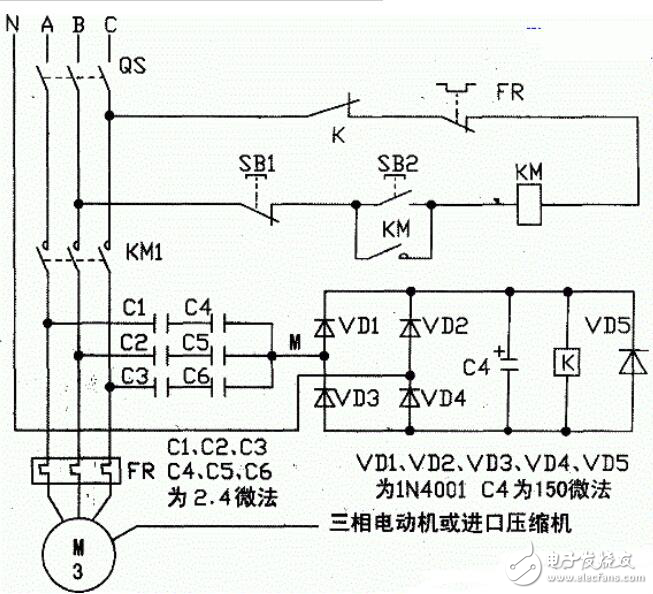
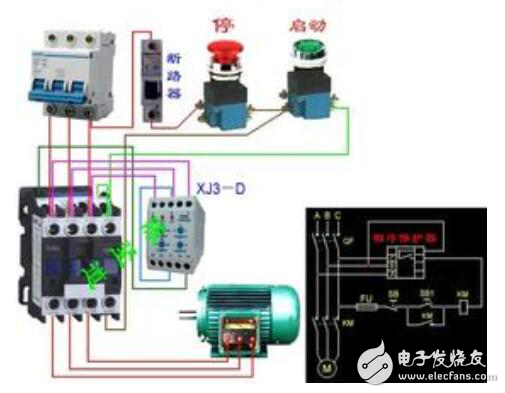
電動機正反轉控制原理圖
在三相交流電氣控制系統中,正常三相相序情況下,三相供電電壓為ABC,供電相電壓220V,相電壓380V,工作頻率50Hz,當合上刀閘開關QF1時,系統帶電,PLC等控制器控制KM1接觸器吸合,KM2接觸器斷開時,電動機M開始正向轉動,轉動頻率為50Hz,合計3000轉/分鐘。當控制KM2接觸器吸合,KM1接觸器斷開時,電動機M開始反向轉動。
運行控制設備可以是礦井提升機,物料傳送帶等設備,當三相系統相序反向時,會使提升機反向運行,必定危機生產安全。
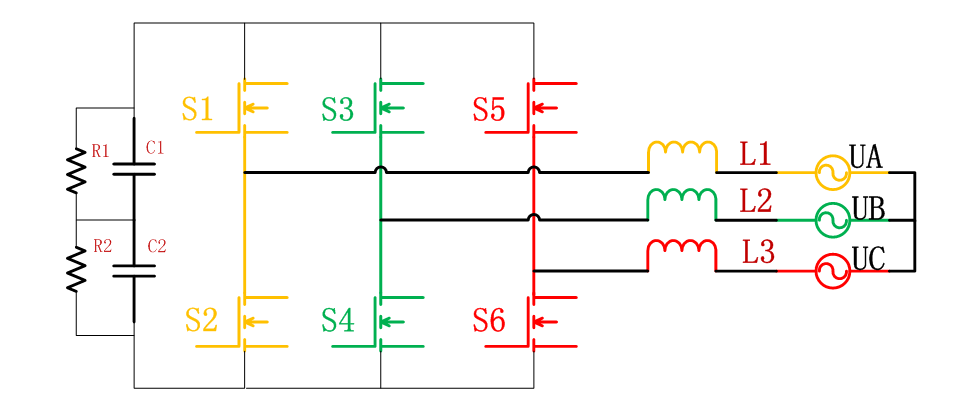
并網逆變器原理圖
在三相并網逆變器并網情況下,需要檢測電網正常三相相序,只有在電網相序正常情況下,才允許逆變器并網發電運行,而當三相相序不正常或三相缺相情況下,逆變器需要停止運行。當然,這些保護功能,逆變器本身都會集成,但在工程驗收發電調試期間,需要檢測正確的電網相序才能夠進行發電調試。
三相缺相保護器特點:
1 三相電壓經過串聯電阻接入保護器。
2 工作電源為9~36V供電范圍;
3 當三相電源不缺相或相序正常時,保護器上綠燈亮,當缺相或相序錯誤時,保護器上紅燈亮。并驅動繼電器動作,給外部保護設備提供保護接入觸點。
4 適用于三相相序檢測缺相報警,保護三相交流電動機,應用在使用三相交流電的工業領域進行相序監控和保護。
三相缺相相序保護器原理分析:
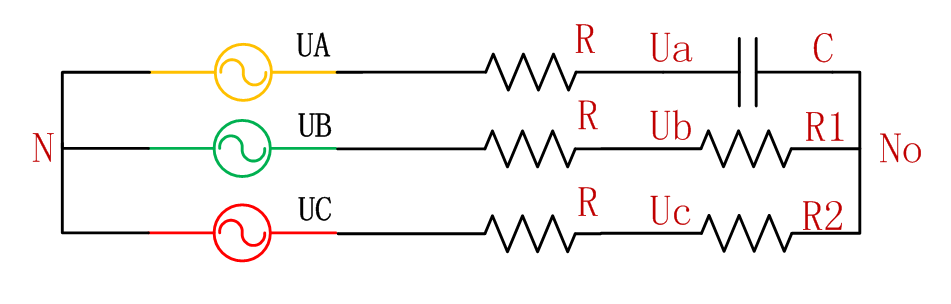
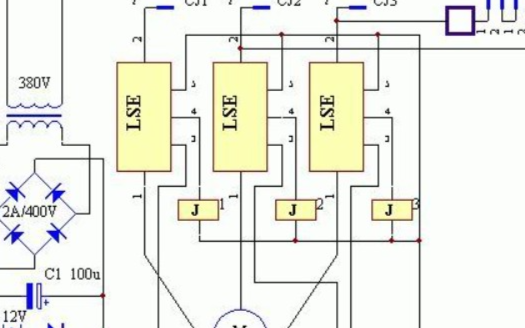
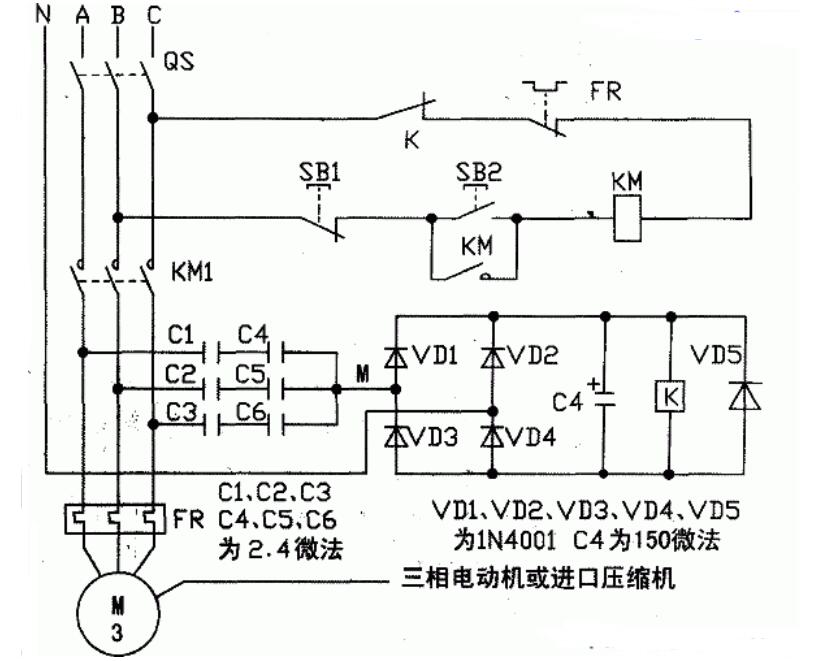
相序檢測原理圖
設三相電源分別為UA,UB,UC,經過電阻R接入到保護器,保護器內部由三個元器件對接入電壓進行檢測,分別是電容C接到A相,電阻R1接到B相,電阻R2接到C相。
檢測三個元器件的電壓UaNo, UbNo, UcNo,根據三個元器件的電壓值就可以判斷是否發生了電壓相序故障。
1 當發生缺相時,對應的元器件不流過電流,因此,與發生缺相相連接的元器件,如果是電阻器,則電阻兩端的電壓為0V。如果是電容器,可通過檢測電容電流為0A判斷,可知,缺相是一種非常好判斷的故障。
2 當發生相序錯誤時,三個元器件的端電壓必然與相序正常情況下元器件端電壓不同。通過判斷元器件兩端的電壓變化情況即可判斷相序是否正常。
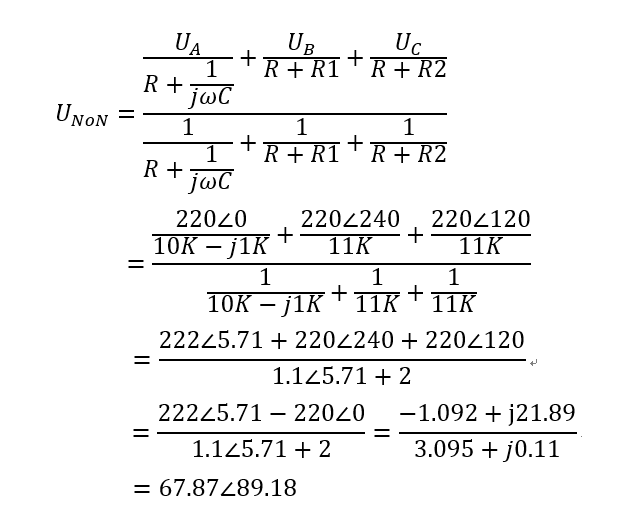
根據KCL,KVL理論可求解三個元器件的電壓值:
運用復阻抗方法表示電容阻抗為1/Cω,應用節點電壓法,列寫KCL方程:

用相量表示電壓,
令UA=220∠0 V,UB=220∠240 V,UC=220∠120 V,
R=10K,1/ Cω=R1=R2=1K,帶入公式中,計算Unon:
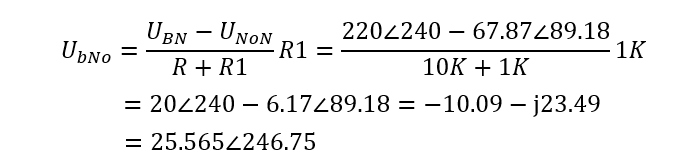
知道了中心點電壓后,就可以求出電阻R1兩端的電壓:
同樣的方式,可求出R2兩端的電壓:
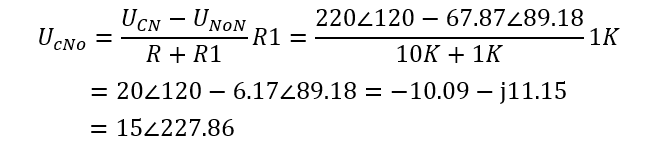
這里假設電容所接的一相為A相,當相序正常情況下,電阻R1所接的B相電壓,對應的R1兩端電壓幅值為25.565V,電阻R2所接的C相電壓,對應的R2兩端電壓幅值為15V,可見電阻R1兩端的電壓大于電阻R2兩端的電壓;而當相序反向的時候,會使得電阻R2兩端的電壓大于電阻R1兩端的電壓。這樣就可以通過簡單的阻容網絡判斷電壓的相序。
到目前為止,我們討論了一種利用硬件實現電壓相序判斷的方法,是一種簡單低成本的檢測相序方法,現實中,是否所有的三相設備都需要配備這種相序保護器哪?
當然不是,有些設備可以就地取材來判斷相序,比如并網用逆變器設備。
并網用逆變器設備由于自身具有采樣網側電壓的需求,因此,通過數字處理器(DSP)已經知道了三相電壓的大小,那么是否存在一種方法來計算是否電網存在缺相和相序錯誤,下面來介紹一種軟件檢測電壓缺相的方法:
三相電壓從靜止坐標變換到旋轉坐標,可獲得直流電壓Ud+,即三相交流電壓的正序分量幅值。當三相電壓相序反向時,旋轉坐標的正序直流電壓分量為0,而負序直流電壓分量的幅值Ud-等于當三相電壓相序正常情況下的Ud+值。這樣,僅僅通過軟件計算就完全可以知道是否發生了相序錯誤。
什么是靜止坐標:簡單講,就是變量按時間順序進行變化,坐標軸不變化。
三相交流電壓是隨著時間按正弦波的形式變化的物理量,可以用幅相坐標曲線表示。橫軸為相角ωt坐標軸,角度隨時間做線性變化,縱軸為幅值坐標軸,幅值隨著角度按正弦規律變化。
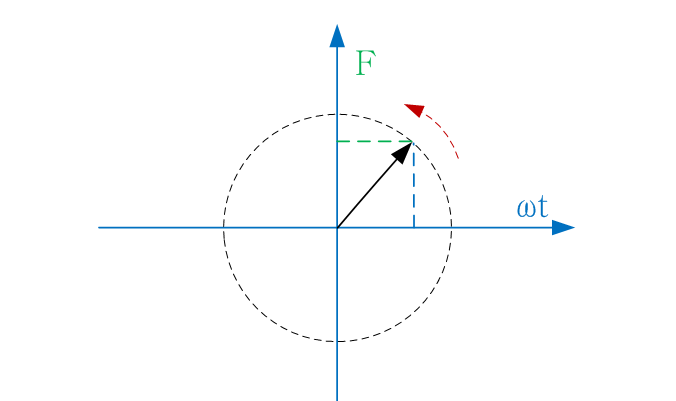
如果把ωt包含在坐標軸變量里,那么這個關于ωt的時間坐標,就變化為關于αβ的兩相靜止坐標,兩相靜止坐標中αβ都是關于ωt的函數變量。
如果把一個正弦波電壓量u表示成復指數形式:

那么,復指數形式電壓的實部就是該正弦波電壓量,虛部是與正弦波電壓成90度關系的電壓量。把橫坐標定義為α軸,表示實部值,縱坐標定義為β軸表示虛部值,這個新的坐標就是兩相靜止坐標。那么,Ua的幅值只在α軸上變化,此時,如果把Ub和Uc兩個電壓也在一個坐標下表示,那么,就得到了三相電壓的兩相靜止坐標表示方式。
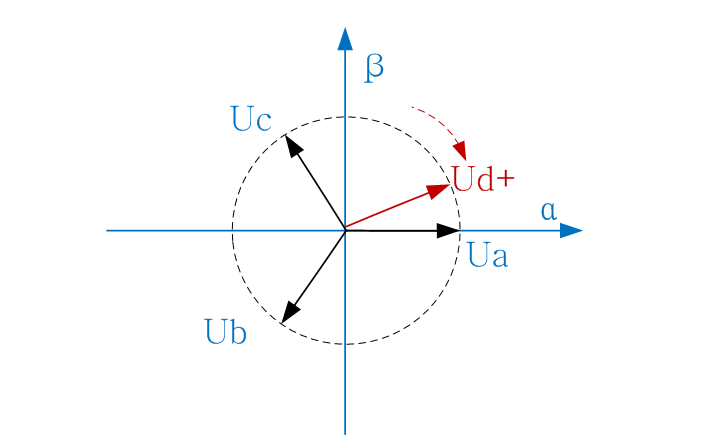
假設Ua初相角為0度,Ub初相角滯后Ua120度,Uc初相角超前Ua120度,那么,他們在兩相靜止坐標空間上按順時針排列。任意時刻,三相電壓都能夠合成一個電壓矢量,而合成電壓也是按逆時針方向旋轉的相量。
如果把這個合成電壓矢量當做旋轉坐標的d軸,把與d軸垂直的軸當做q軸,那么就得到了兩相靜止坐標到旋轉坐標的轉換。顯然Ud相對于旋轉坐標的d軸是靜止的,而旋轉坐標d軸相對于α軸是旋轉的,即旋轉坐標是坐標軸在旋轉。
因此,如果坐標中沒有正序分量進行旋轉,只存在負序分量旋轉,則Ud+=0,只有負序旋轉電壓Ud-。
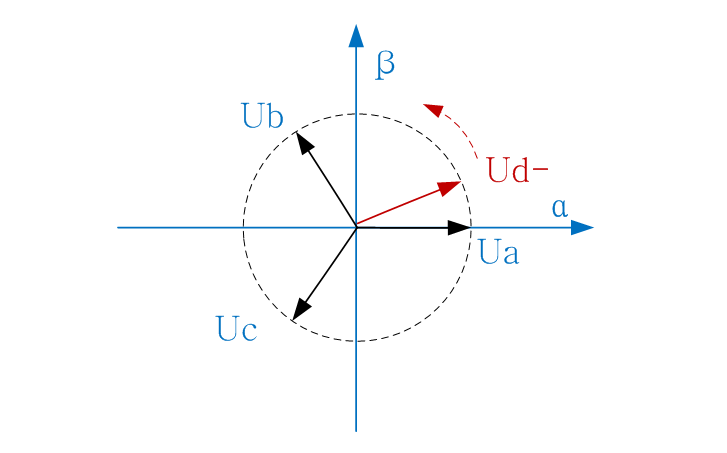
通過程序計算Ud-,即可判斷是否發生了相序翻轉。
-
控制系統
+關注
關注
41文章
6716瀏覽量
111323 -
電動機
+關注
關注
75文章
4139瀏覽量
97636 -
逆變器
+關注
關注
290文章
4812瀏覽量
208930 -
保護器
+關注
關注
6文章
1056瀏覽量
33847 -
三相電源
+關注
關注
4文章
169瀏覽量
21955
發布評論請先 登錄
相關推薦





 工商網監
工商網監

評論