

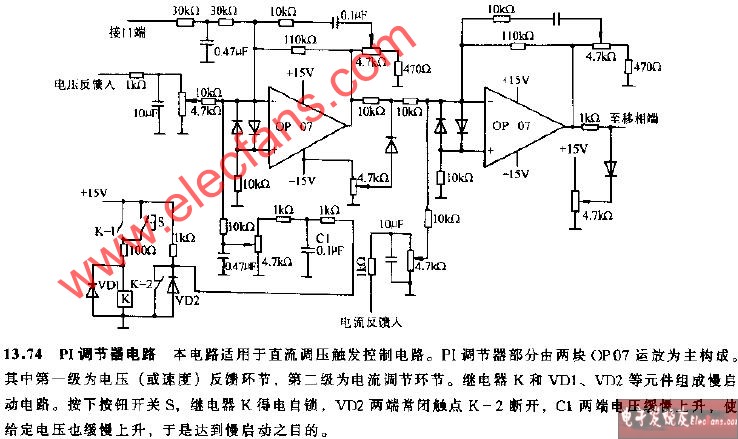
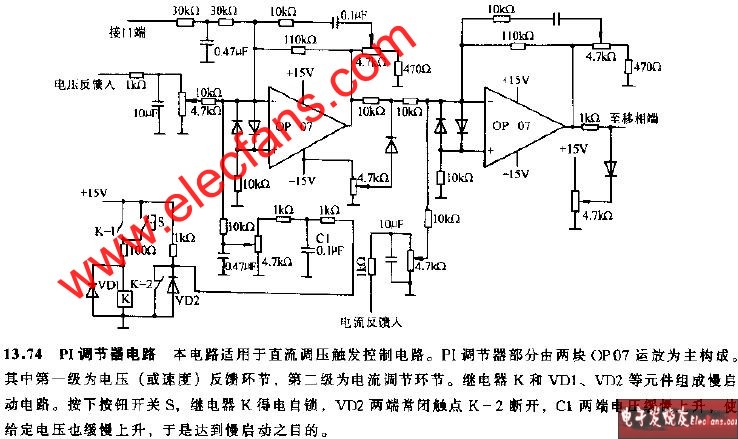
如何從零開始設計帶有保護和限幅功能的閉環PI調節器硬件電路。
1 PI調節器概念
PI調節器是工業過程控制中常用的有源校正裝置。
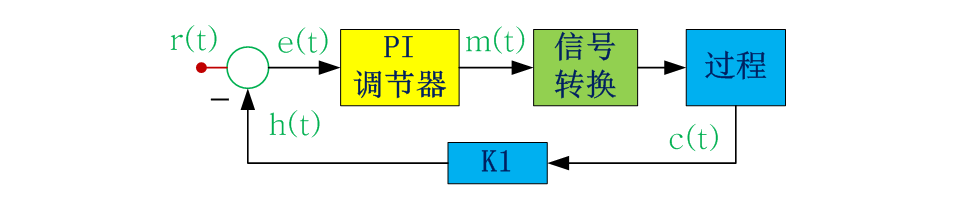
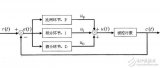
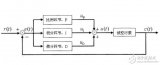
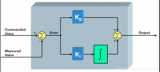
PI控制器的組成為給定值控制單元,PI單元,信號轉換單元三個部分。
給定值單元接收工業控制過程的測量量c(t)和控制裝置的給定量r(t)。給定值可以為本機內部給定值(屬于本地控制范疇)或設備外部給定值(屬于遠程控制范疇),PI單元接受給定值控制單元產生的誤差信號e(t),并按已知設定的控制參數輸出閉環控控制信號m(t),信號轉換單元用于將m(t)信號轉換為控制設備所接受的信號變化規律和數值范圍,驅動控制執行元件動作,從而達到自動控制的目的。
2 PI調節器的硬件實現
設給定控制信號r(t)是電壓值,控制過程輸出值c(t)與給定控制信號電壓值之間呈現固定的比例關系K1,h(t)=K1c(t),當r(t)=h(t)時,e(t)=0,PI調節器輸出保持當前值m(t),控制過程輸出保持c(t)不變。
2.1 PI調節器電路
誤差信號的產生是輸入信號與反饋信號之間相減所產生的,因此,控制誤差信號的產生電路實際上是用硬件電路實現兩個信號的減法電路結構。
硬件給定積分器輸出信號Uob相對于公共端電壓為負值,當PI調節器的輸入信號由給定積分器提供時,輸入量r(t)是小于0的電壓量;
反饋信號通常是通過電壓霍爾傳感器的輸出電壓信號,該信號相對于公共端電壓為正值,當利用加法電路實現兩個信號相加時,獲得的結果為兩個電壓信號相減。通常帶有誤差輸入的比例積分電路如下圖所示:
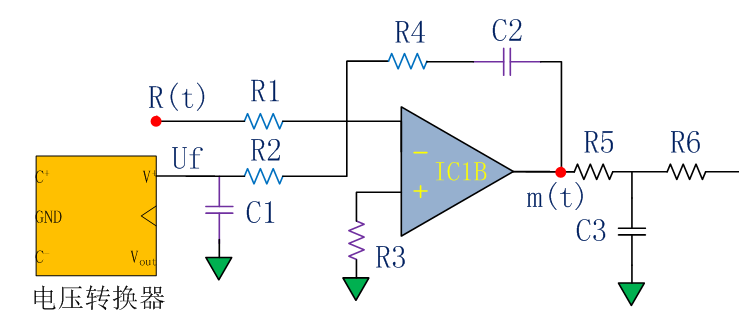
列寫電路方程,求輸出M與輸入電壓R,Uf之間的關系:
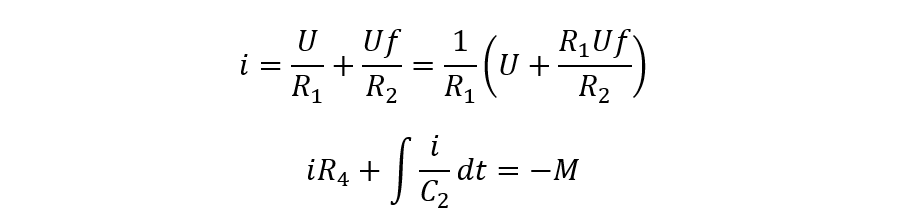
把方程中的電流變量消掉:

設誤差信號e(t)為:

則輸出電壓M信號與輸入誤差信號E之間的關系:

設Kp=R4/R1為比例系數,Ti=R1C2為積分時間常數。則上式可簡化為標準的比例積分公式:

把時域比例積分方程式兩側同時求取零狀態下拉氏變換:

用傳遞函數形式表示E(s)與M(s)之間的關系:

把Kp=R4/R1,Ti=R1C2帶入方程中:

2.2 抑制PI調節器的低頻信號積分:
對于積分環節,當輸入誤差信號E頻率很低,在一段時間內接近于直流信號時,誤差信號會使得積分器始終在一個電流方向累計,當累積時間相當長,會使得積分器輸出飽和。積分飽和現象在控制系統中必須要避免發生,否則系統會出現各種意想不到的現象,甚至會使得控制系統損耗。
如何能夠抑制低頻信號積分,而又能保證高頻信號的正常積分是一個非常具有實際意義的問題。
下面把PI調節器進行化簡,輸入信號用誤差信號代替。
在資料中,介紹了一種PI積分電路并聯一個電阻Rf的方法來抑制低頻信號的積分飽和,現在來分析一下這個電路。
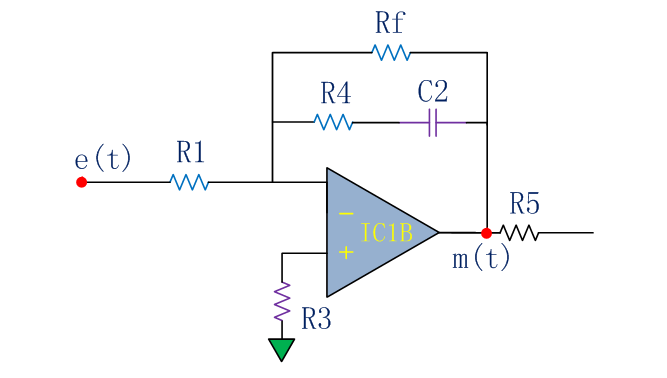
把電容C2用復數阻抗表示,求取輸入信號E(s)與輸出信號M(s)之間的傳遞函數:

化簡后獲得傳遞函數:

對比兩種情況下,輸出信號M(t)在t趨于無窮大時的值。
假設e(t)是一個單位階躍信號,則e(t)的拉氏變換為E(s)=1/s。上述等式應用終值定理求m(t):
不帶電阻Rf的情況下,PI調節器輸出值m(t):


帶電阻Rf的情況下,PI調節器輸出值m(t):
比較后得出結論:在單位階躍誤差輸入信號作用下,不帶低頻抑制電阻Rf時,PI調節器輸出值趨于-∞,而帶有低頻抑制電阻Rf的電路,PI調節器輸出值為-Rf/R1。當Rf=R1時,m(t)=-e(t),對于低頻或直流信號,帶有Rf電阻的PI調節器更像一個比例調節器,積分功能不起作用。當信號角頻率ω>1/(C2(R4+Rf))時,輸出特性才表現為積分特性。
2.3 防止積分反向
從兩個方面來防止積分反向:1 電容C2的電壓反向,2 運放輸出電壓反向。
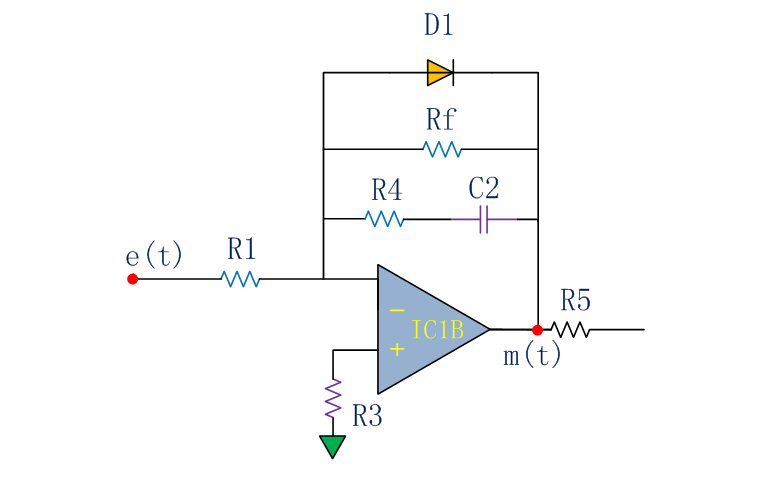
電容電壓反向的抑制的意義:
1 當e(t)>0時,電容C2反向充電,增加一個二極管D1,當發生Uc2電壓反向的時候,二極管D1導通,使得Uc2電壓不進一步上升,被鉗位在二極管壓降0.7V。
2 當e(t)的極性被更正后,電容C2的電壓能夠快速的由反向充電轉變為正向充電。
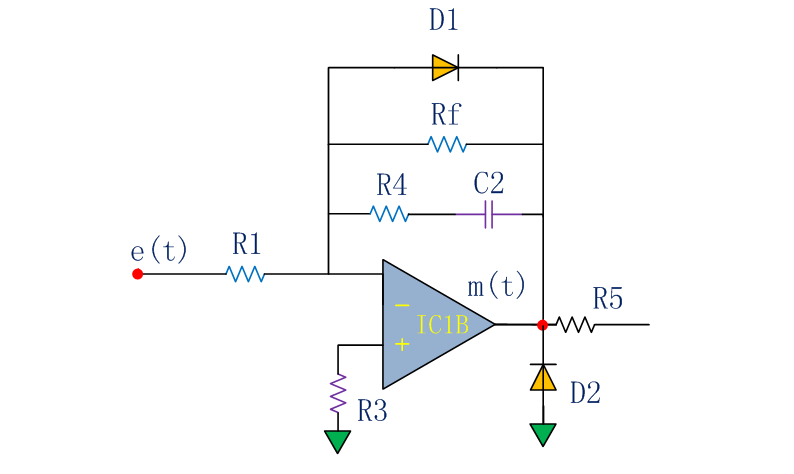
運放輸出電壓反向的抑制比較簡單,在輸出端反向并聯一個二極管D2,當m(t)<0時,二極管D2導通,使得運放輸出電壓鉗位到二極管D2端壓降-0.7V處。
2.4 PI調節器輸出限幅
當PI調節器輸出值太大時,會發生設備功率過大而損壞情況,通常限幅輸出時必須考慮的硬件設計問題。
比較簡單實用的限幅方式還是二極管鉗位電路限幅。
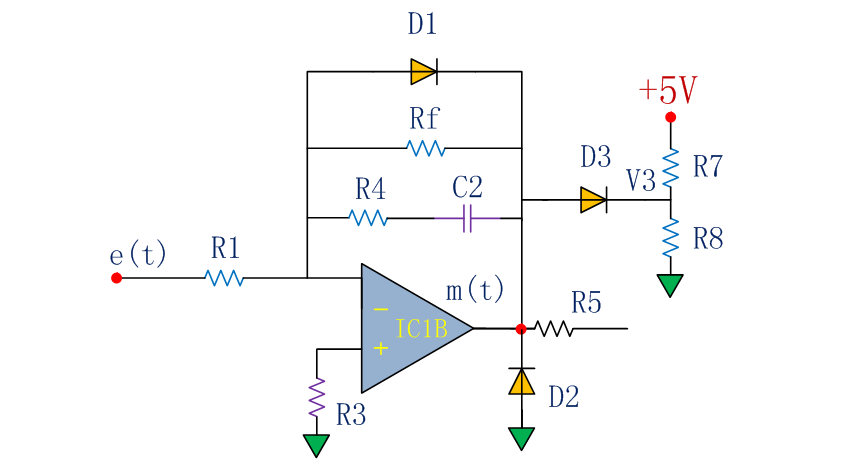
在調節器輸出端接二極管D3和分壓電阻R7,R8組成電壓鉗位電路。

當m(t)>V3+0.7時,二極管D3導通,運放輸出電壓m(t)=V3+0.7.
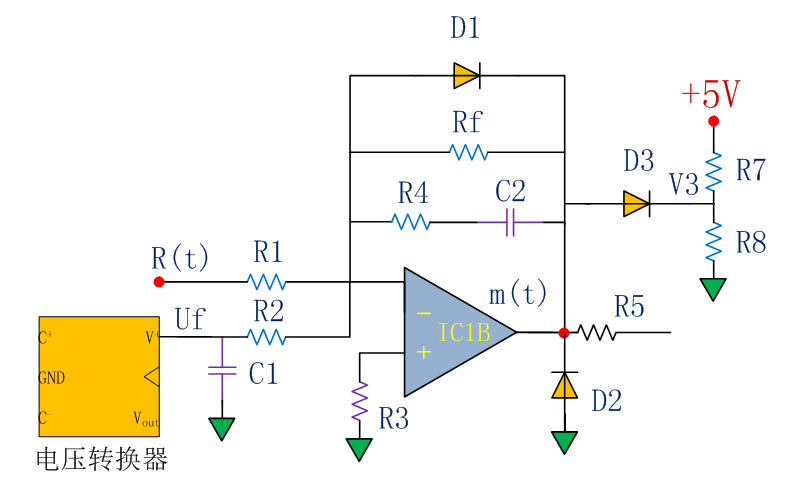
至此獲得完整的帶有保護和限幅功能的PI調節器電路圖:
3 信號轉換
許多工程設備控制過程與調節器輸出值之間是負相關性,即調節器輸出值最大時,往往是控制過程需要輸入最小值的情況,反之,調節器輸出值為零的時候,控制過程往往需要輸入最大值。電壓信號轉換曲線類似于y=-kx+b圖形:
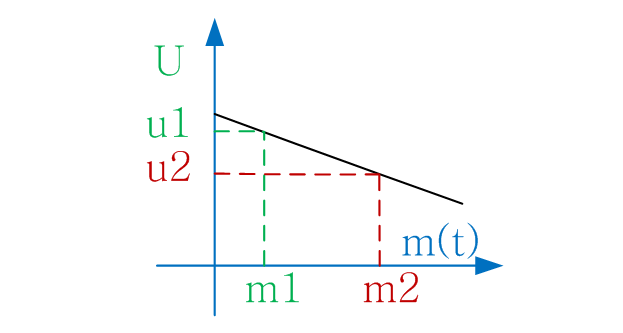
對于這種過程控制,需要對調節器的輸出值進行變換后才能輸入給控制過程。處理這種信號曲線,首先要對信號u進行偏移,然后讓信號m按一定比例k反向,再和偏移量疊加。
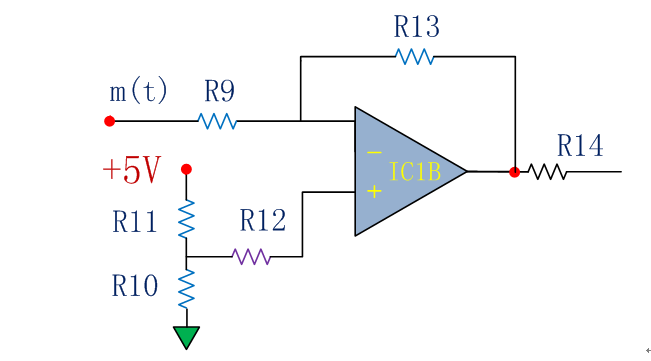
電阻R10,R11用來實現輸出電壓的偏移,電阻R9和R13用來實現信號m(t)的反向比例放大。
設偏移電壓為Ub,根據運放的虛斷性質,流入運放的電流為0,因此R12不影響Ub的計算,則Ub等于R10,R11對5V電壓的分壓值:

根據運放的虛短性質,運放同向輸入端和反向輸入端電壓為Ub,因此,可以計算電路的輸出值U:

把公式整理后,獲得U的公式:

4 結論
通過上述的分析,我們可以發現,這個PI調節器的電路設計是按照方框圖的順序進行的,如果把每一部分設計連接起來組成一個完整的方框圖,就是整個系統的控制電路圖;這個控制電路圖是帶有負反饋,保護和積分限幅,電平轉換功能的控制系統。
-
PI
+關注
關注
12文章
225瀏覽量
112999 -
調節器
+關注
關注
5文章
876瀏覽量
47387 -
工業控制
+關注
關注
38文章
1527瀏覽量
86742 -
硬件電路
+關注
關注
39文章
252瀏覽量
29683 -
PI控制器
+關注
關注
1文章
25瀏覽量
11630
發布評論請先 登錄
PI電流調節器的工作原理和種類
FOC電機控制中的PI調節器
一種新的PI調節器在交流解耦控制系統中的應用
pi調節器原理_pi調節器電路圖_pi調節器參數作用
pi調節器的輸入和輸出_pi調節器的傳遞函數
PI調節器介紹及設計
永磁同步電機磁場定向控制轉速環PI調節器參數整定

永磁同步電機磁場定向控制電流環PI調節器的參數整定
永磁同步電機磁場定向控制轉速環PI調節器的參數整定





 工商網監
工商網監

評論