


本篇關(guān)于之前做的一個(gè)project的具體實(shí)現(xiàn)。常有一種遺憾,遇到很美的風(fēng)景而你的鏡頭卻不能全部將它收入“眼底”。現(xiàn)在許多手機(jī)上都有了全景模式,這個(gè)功能在一定程度上緩解了問題,但對于有些的同學(xué)比如說我依然會(huì)拍出“抖動(dòng)”嚴(yán)重的畫面。今天我要介紹的這個(gè)project就可以將多個(gè)單張不同角度的風(fēng)景拼成一張大圖。
效果如下:
首先使用Harris Corner特征檢測器和sift描述符檢測圖像中的特征,并在其他圖像中找到最佳匹配特征; 然后使用RANSAC 對齊照片(確定它們的重疊和相對位置),最后將生成的圖像拼接到一個(gè)無縫的全景圖中。
多張單圖:





全景圖:

首先基本步驟為:
- 進(jìn)行角點(diǎn)檢測,本文中將使用Harris corner detector方法進(jìn)行角點(diǎn)檢測。
- 進(jìn)行興趣點(diǎn)描述,構(gòu)建sift descriptor。
- 兩張圖片之間進(jìn)行興趣點(diǎn)匹配
- 利用Ransac算法計(jì)算兩張圖片之間的homography(H矩陣)
- 根據(jù)H變換圖片并將兩張圖片拼接在一起。
- 多次運(yùn)行以上步驟,將所有圖片進(jìn)行拼接,最后獲得全景圖。
具體步驟:
Step1. Harris corner角點(diǎn)檢測
A.計(jì)算圖像x,y方向上的導(dǎo)數(shù)。
B.計(jì)算圖像導(dǎo)數(shù)的協(xié)方差矩陣H。
H= 
通常,在計(jì)算協(xié)方差矩陣時(shí),計(jì)算窗口或圖像的小區(qū)域上的 ,
, 和
和 之和。為了獲得更好的角點(diǎn)檢測結(jié)果可以使用高斯加權(quán)窗口。使用det(H)/trace(H),其中det(H)為 計(jì)算每個(gè)點(diǎn)的Harris響應(yīng)值。設(shè)置閾值找到并存儲(chǔ)興趣點(diǎn)位置。
之和。為了獲得更好的角點(diǎn)檢測結(jié)果可以使用高斯加權(quán)窗口。使用det(H)/trace(H),其中det(H)為 計(jì)算每個(gè)點(diǎn)的Harris響應(yīng)值。設(shè)置閾值找到并存儲(chǔ)興趣點(diǎn)位置。
code:
def detectKeypoints(image):
#接收圖像
image = image.astype(np.float32)
image /= 255.
height, width = image.shape[:2]
features = []
grayImage = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
#轉(zhuǎn)換成灰度圖 計(jì)算Harris值
harrisImage, orientationImage = computeHarrisValues(grayImage)
#harrisImage=[harrisImage>np.average(harrisImage)]
#應(yīng)用LocalMaxima算法進(jìn)行特征篩選
harrisMaxImage =computeLocalMaxima(harrisImage)
#設(shè)置threshold將特征值進(jìn)一步過濾,興趣點(diǎn)數(shù)量進(jìn)一步減少
threhold = 0.01*np.max(harrisImage)
for y in range(height):
for x in range(width):
if not harrisMaxImage[y, x]:
continue
f = cv2.KeyPoint()
f.size = 10
f.angle = orientationImage[y,x]
f.pt = (x,y)
f.response = harrisImage[y,x]
if(f.response>threhold):
features.append(f)
return features
Harris corner的部分
def computeHarrisValues(Image):
height, width = Image.shape[:2]
harrisImage = np.zeros(Image.shape[:2], dtype=float)
orientationImage = np.zeros(Image.shape[:2], dtype=float)
sobx = np.zeros(Image.shape[:2], dtype=float)
filters.sobel(Image, 1, sobx)
soby = np.zeros(Image.shape[:2], dtype=float)
filters.sobel(Image, 0, soby)
# sobx = filters.convolve(srcImage,sx,mode='reflect')
# soby = filters.convolve(srcImage,sy,mode='reflect')
Ix = sobx*sobx
Iy = soby*soby
Ixy = sobx*soby
Wxx = filters.gaussian_filter(Ix,sigma=0.5)
Wyy = filters.gaussian_filter(Iy,sigma=0.5)
Wxy = filters.gaussian_filter(Ixy,sigma=0.5)
harrisImage = Wxx*Wyy - Wxy*Wxy - 0.1*(Wxx+Wyy)*(Wxx+Wyy)
orientationImage = np.arctan2(soby,sobx)*(180) / np.pi
return harrisImage, orientationImage
結(jié)果展示:


聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報(bào)投訴
-
檢測器
+關(guān)注
關(guān)注
1文章
894瀏覽量
48741 -
圖像
+關(guān)注
關(guān)注
2文章
1094瀏覽量
41345 -
Sift
+關(guān)注
關(guān)注
1文章
38瀏覽量
15384
發(fā)布評(píng)論請先 登錄
相關(guān)推薦
熱點(diǎn)推薦
用ADE XLall跑all Corner時(shí) 第一個(gè)Corner為什么總是會(huì)報(bào)錯(cuò)?
在用 ADE XL仿真出現(xiàn)一個(gè)error ERRO ID:5010在用 ADE XLall 跑all Corner 的時(shí)候,第一個(gè)Corner總是會(huì)報(bào)錯(cuò)。不知道怎么回事,outputl
發(fā)表于 06-25 06:04
基于小波變換多尺度Harris角點(diǎn)檢測算法
提出一種新的基于小波變換的Harris 多尺度角點(diǎn)檢測算法,可以在不同的尺度下獲取角點(diǎn),克服了單一尺度的Harris 角點(diǎn)檢測算法可能存在的角點(diǎn)信息丟失和易受噪聲影響而檢測出
發(fā)表于 01-09 11:18
?41次下載
Harris加快信號(hào)處理FPGA驗(yàn)證
Harris公司的工程師們經(jīng)常在緊迫的時(shí)限內(nèi)交付基于FPGA的復(fù)雜信號(hào)處理系統(tǒng)。為了滿足客戶時(shí)常十分嚴(yán)格的要求以及自身的質(zhì)量標(biāo)準(zhǔn),工程師們會(huì)在綜合各個(gè)系統(tǒng)前徹底驗(yàn)證HDL設(shè)計(jì)。 在過去,HDL驗(yàn)證需要多步手工操作現(xiàn)在,Harris工程師們使用EDASimulatoLink
發(fā)表于 03-15 15:36
?13次下載
Python實(shí)現(xiàn)所有算法-基本牛頓法
Python實(shí)現(xiàn)所有算法-二分法 Python實(shí)現(xiàn)所有算法-力系統(tǒng)是否靜態(tài)平衡 Python實(shí)現(xiàn)
一個(gè)純Python編寫的輕量級(jí)數(shù)據(jù)庫
TinyDB 是一個(gè)純 Python 編寫的輕量級(jí)數(shù)據(jù)庫,一共只有1800行代碼,沒有外部依賴項(xiàng)。
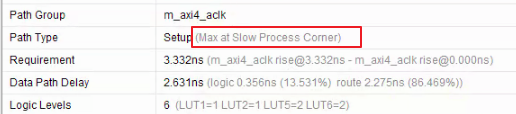
FPGA中的fast corner和slow corner介紹
在FPGA的時(shí)序分析頁面,我們經(jīng)常會(huì)看到`Max at Slow Process Corner`和`Min at Fast Process Corner`,具體是什么含義呢?
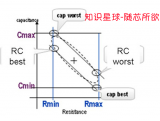
RC Corner基礎(chǔ)知識(shí)詳細(xì)講解
90nm后更新的工藝,考慮到互連線coupling的影響,出現(xiàn)了RCworst, RCbest corner.
UltraEM?的Corner Sweep仿真實(shí)例
UltraEM可以使用Corner Sweep來仿真工藝變化對器件結(jié)構(gòu)造成的影響,具體包含三種仿真模式:MonteCarlo仿真、Perturbation仿真與Corner仿真。
Python實(shí)現(xiàn)OpenCV的安裝與使用
本文實(shí)例講述了 Python 實(shí)現(xiàn) OpenCV 的安裝與使用。分享給大家供 大家參考,具體如下: 由于下一步要開始研究下深度學(xué)習(xí),而深度學(xué)習(xí)領(lǐng)域很多的算法和應(yīng) 用都是用 Python
發(fā)表于 07-20 11:46
?7次下載
TinyDB :一個(gè)純Python編寫的輕量級(jí)數(shù)據(jù)庫
TinyDB 是一個(gè)純 Python 編寫的輕量級(jí)數(shù)據(jù)庫,一共只有1800行代碼,沒有外部依賴項(xiàng)。 TinyDB的目標(biāo)是降低小型 Python
芯片后端signoff的RC corner指什么?
今天想聊一聊STA相關(guān)的RC corner的問題。我先簡單介紹一些什么是signoff的corner,然后重點(diǎn)聊一聊RC
如何使用Python PySNMP模塊獲取設(shè)備指標(biāo)呢?
PySNMP 是一個(gè)跨平臺(tái)的純Python SNMP 引擎實(shí)現(xiàn)。
IBIS模型中的Corner參數(shù)處理
本文聚焦IBIS(I/O Buffer Information Specification)模型中的Corner(Typ/Min/Max)參數(shù)處理,系統(tǒng)分析Corner的定義規(guī)則及其對信號(hào)完整性






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論