

導讀:本文系“2021一帶一路暨金磚國家技能發(fā)展與技術創(chuàng)新大賽”中獲得團體二等獎項目,參賽隊伍來自哈爾濱工程大學。指導老師是昝英飛教授,隊員分別郭睿男,邱天和宋友鵬。正值仿真秀2023機器人工業(yè)品技術交流月如火如荼,2月27日19時30分,我們將邀請哈爾濱工程大學的船舶與海洋工程行業(yè)專利獎優(yōu)秀獎、中國造船工程學會科技進步一等獎獲得者、仿真秀特聘講師郭睿男博士分享《水下機器人建模方法與仿真分析技術》介紹ROV水下作業(yè)仿真的建模方法和關鍵技術,并討論水下機器人作業(yè)仿真技術的發(fā)展方向和應用前景,詳情見后文。
摘要:針對遙控水下機器人(ROV)作業(yè)的仿真預演與培訓,基于開源框架開發(fā)ROV水下作業(yè)仿真平臺,實現(xiàn)六自由度ROV和機械手運動。仿真平臺包括人機交互模塊、路徑跟蹤模塊、PID 控制器模塊、推力分配模塊、ROV運動學和動力學解算模塊。進行開架式ROV龔嘴水電站壩體水下檢測作業(yè)仿真。利用路徑跟蹤技術掃描水壩檢測區(qū)域,確定泄洪口異物位置,由駕駛員操縱ROV和機械手清理異物。針對ROV位姿、推力等輸出信息,分析檢測作業(yè)并提出優(yōu)化方案。
一、引言
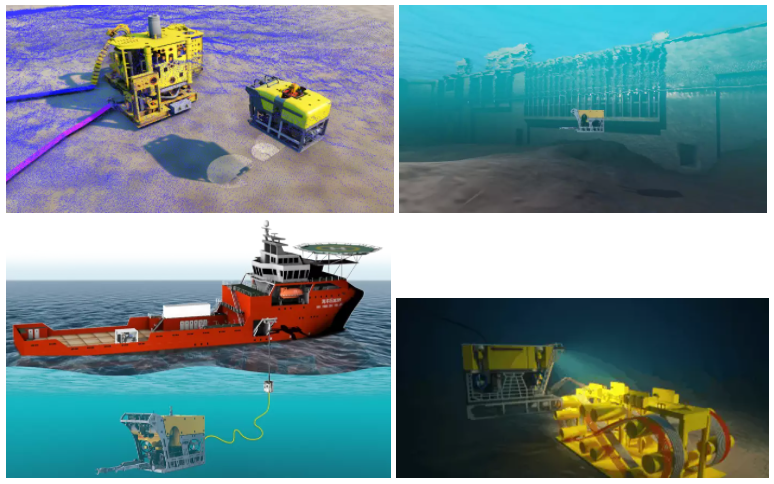
ROV水下作業(yè)仿真平臺適用于海洋工程、海洋科考、水利水電工程等典型領域的ROV作業(yè)仿真。通過ROV作業(yè)仿真平臺進行作業(yè)仿真預演與培訓,可以增強ROV作業(yè)安全性,提升作業(yè)效率,節(jié)約作業(yè)成本;開展作業(yè)風險評估、作業(yè)方案預演和團隊模擬演練;根據(jù)作業(yè)仿真結果,評估優(yōu)化作業(yè)方案,提供作業(yè)安全限界和建議。ROV作業(yè)仿真平臺可基于虛擬現(xiàn)實技術實時再現(xiàn)深海 ROV 作業(yè)三維場景,可為深海 ROV 水下作業(yè)提供從方案設計到現(xiàn)場施工過程的技術支撐;可以通過硬件集成,進行ROV水下作業(yè)運動估算與輔助定位,實現(xiàn)作業(yè)人員與 ROV 裝備的最佳結合,對提升 ROV 作業(yè)人員技能、作業(yè)效率、作業(yè)安全性具有重要意義。
ROV水下作業(yè)仿真平臺適用于海洋工程、海洋科考、水利水電工程等典型領域的ROV作業(yè)仿真。通過ROV作業(yè)仿真平臺進行作業(yè)仿真預演與培訓,可以增強ROV作業(yè)安全性,提升作業(yè)效率,節(jié)約作業(yè)成本;開展作業(yè)風險評估、作業(yè)方案預演和團隊模擬演練;根據(jù)作業(yè)仿真結果,評估優(yōu)化作業(yè)方案,提供作業(yè)安全限界和建議。ROV作業(yè)仿真平臺可基于虛擬現(xiàn)實 VR 技術實時再現(xiàn)深海 ROV 作業(yè)三維場景,可為深海 ROV 水下作業(yè)提供從方案設計到現(xiàn)場施工過程的技術支撐;可以通過硬件集成,進行ROV水下作業(yè)運動估算與輔助定位,實現(xiàn)作業(yè)人員與 ROV 裝備的最佳結合,對提升 ROV 作業(yè)人員技能、作業(yè)效率、作業(yè)安全性具有重要意義。
ROV水下作業(yè)仿真平臺的開發(fā)解決了海洋工程作業(yè)中存在的兩個問題,即,ROV作業(yè)方案大多基于經(jīng)驗制定,缺乏作業(yè)安全的科學驗證手段,應用ROV水下作業(yè)仿真平臺對作業(yè)進行模擬,可以對作業(yè)風險進行評估;ROV水下作業(yè)時間長,水下作業(yè)支持船舶使用成本高。應用ROV水下作業(yè)仿真平臺進行作業(yè)預演和人員培訓,可以優(yōu)化海洋工程作業(yè)流程和方案,減少不必要的浪費。
ROV水下作業(yè)仿真平臺對于提高ROV作業(yè)安全性和作業(yè)效率,完善ROV作業(yè)技術和支撐裝備體系具有重要意義。基于ROV水下作業(yè)仿真平臺為人員技能提升、風險事前規(guī)避、在線決策支持等提供技術保障;為實時作業(yè)成果再現(xiàn)、作業(yè)規(guī)劃和培訓等應用功能提供技術支撐;對提高深水ROV作業(yè)效率與安全性具有重要意義。
ROV水下作業(yè)仿真平臺可以結合VR技術實現(xiàn)實時水下三維視景,所以可用于數(shù)字孿生體進一步研究。ROV水下作業(yè)仿真平臺的開發(fā)進一步提升企業(yè)科技成果轉化能力和高校科技創(chuàng)新能力,開發(fā)過程中與上海遨拓深水裝備技術開發(fā)有限公司和深圳海油工程水下技術有限公司等相關單位在產(chǎn)學研用的深度合作,對提高我國海洋工程裝備與配套體系建設、實現(xiàn)“十四五”時期加快壯大新一代海洋裝備等產(chǎn)業(yè)的目標任務具有重要意義。
ROV作業(yè)仿真平臺為深海空間站、深海礦藏開采等水下作業(yè)提供科技支撐,為海上作業(yè)向數(shù)智化發(fā)展提供必要手段,推動ROV相關設備的技術更新,具有顯著的經(jīng)濟和社會效益。
ROV水下作業(yè)仿真平臺已完成海試實驗,并為荔灣 3-1 氣田、文昌 9-2/9-3 氣田群等典型工程項目提供了ROV作業(yè)方案評估及人員培訓支持,同時為東海石油管道、內(nèi)河水電站壩體、長隧道涵洞等檢修等提供了仿真技術支持。本文介紹基于開源框架的ROV水下作業(yè)仿真平臺的開發(fā),以及應用仿真平臺進行的龔嘴水電站壩體檢測作業(yè)仿真。
二、仿真平臺的搭建
1、研究對象
仿真平臺基于開源框架自主開發(fā),實現(xiàn)了ROV水下路徑跟蹤,PID控制和8推進器的推力分配。仿真平臺支持人機交互,利用手柄操作ROV和機械手運動。主要研究對象為一種典型的大功率工作級開架式ROV。該型ROV長 3.5 m,寬和高為2 m。推進器最大推力約為9000 N,縱向航速小于3.2 kn,機械手工作范圍1.8 m,最大負載能力250 kg,腕部最大力矩170 Nm。
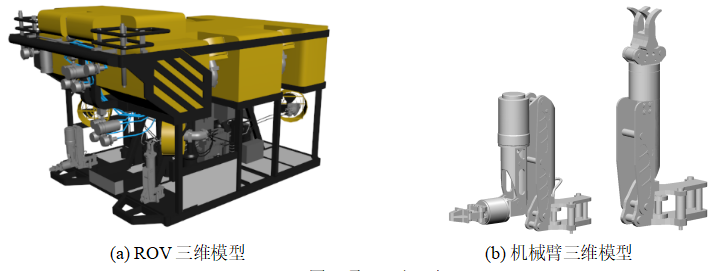
圖1項目研究對象
2、水下作業(yè)仿真平臺模塊
ROV作業(yè)仿真平臺支持兩種作業(yè)模式,可預設ROV路徑,通過路徑跟蹤模塊實現(xiàn)ROV自動巡航,也可以依靠手柄控制速度增益,由領航員控制ROV航行。路徑跟蹤模塊和人機交互模塊將外部信息轉換為指令速度通過PID控制模塊計算實現(xiàn)指令速度的動力和力矩。仿真平臺包括人機交互模塊、路徑跟蹤模塊、PID 控制器模塊、推力分配模塊、ROV運動學和動力學解算模塊。
人機交互模塊將手柄信號轉化為指令速度,實現(xiàn)半物理仿真;路徑跟蹤模塊基于LIPB方法光滑ROV路徑;PID 控制器模塊基于反饋線性化的PID控制器計算實現(xiàn)指令速度的動力,PID參數(shù)基于田口法和序列二次規(guī)劃針對ROV位姿進行優(yōu)化;推力分配模塊根據(jù)ROV建立推力系數(shù)矩陣和推進器布置矩陣,推力分配模塊將PID控制模塊的動力轉化為8個推進器的推力;ROV運動學和動力學解算模塊根據(jù)推力,基于ROV操縱性數(shù)學模型計算ROV位姿;仿真平臺輸出變量ROV的重心的位置、姿態(tài)角(基于四元數(shù)變換)、速度。
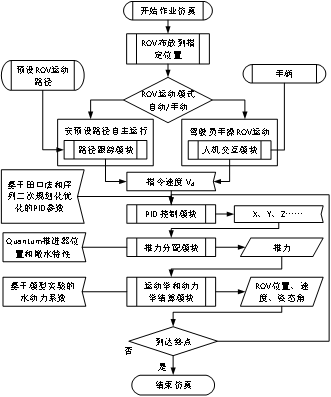
圖 2ROV動力學仿真模塊
(1)路徑跟蹤模塊
路徑跟蹤模塊基于混合多項式線性插值方法光滑路徑,直線運動部分應用線性插值,轉彎處應用五階貝塞爾曲線插值,通過插值結果的有限微分計算指令速度。LIPB插值點為:
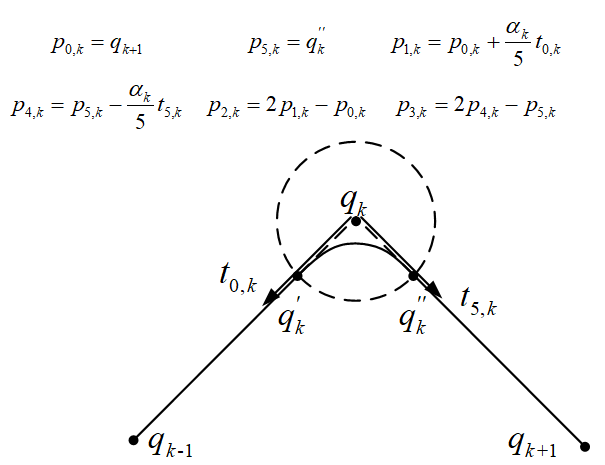
圖 3多項式線性插值
(2)PID 控制模塊
PID 控制模塊采用解耦的方式計算ROV的水動力,選擇指令加速度作為帶加速度前饋的PI控制器,計算空置率。由于ROV運動方程具有非線性項水動力,為提高閉環(huán)反饋的計算效率,采用反饋線性化控制器,提高閉環(huán)反饋的計算效率。選擇控制律:

進行線性化
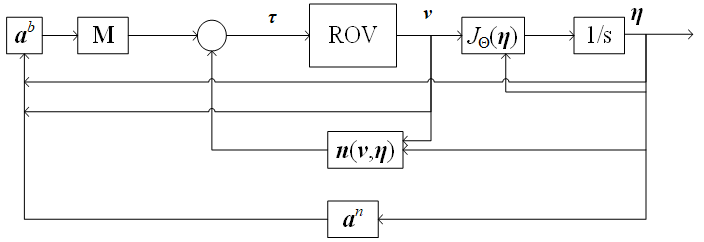
圖 4反饋線性化控制器
(3)推力分配模塊
ROV有8個推進器,四個為垂向推進器,四個為水平推進器。根據(jù)ROV的推進器具體布置建立推進器推力(力矩)公式:

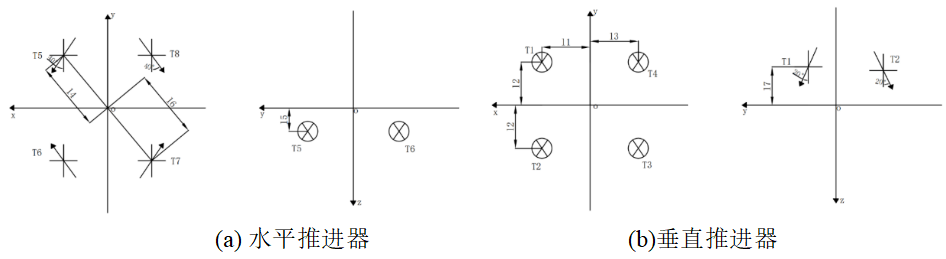
圖 5推進器布置
(4)ROV運動學和動力學解算模塊
分別建立固定坐標系和隨體坐標系,通過主軸坐標和旋轉角度定義四個歐拉參數(shù),依據(jù)四元數(shù)建立坐標變換矩陣。固定坐標系

其中 N 與 E 構成的平面與地球表面相切。另一個坐標系則為隨體坐標系
也稱為動系。主軸
以及角度 。所建立的ROV六自由度操縱性數(shù)學模型考慮非線性水動力,ROV操縱性數(shù)學模型:
。所建立的ROV六自由度操縱性數(shù)學模型考慮非線性水動力,ROV操縱性數(shù)學模型:

用角度和單位矢量 l 的分量來定義的利用四個歐拉參數(shù):
其中
基于四元數(shù)的坐標變換:
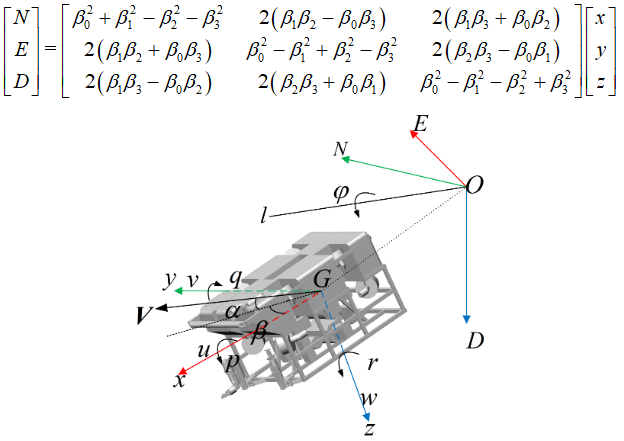
圖 6坐標系與參數(shù)
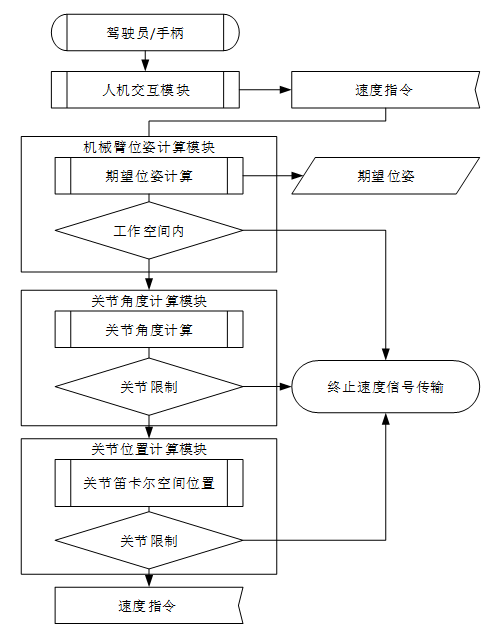
(5)機械手動力學仿真模塊
機械手動力學仿真模塊包括:人機交互模塊、機械臂位姿計算模塊、關節(jié)角度計算模塊、和關節(jié)位置計算模塊。手柄指令通過人機交互模塊轉化為指令速度,經(jīng)由機械臂位姿計算模塊,根據(jù)速度信號和機械臂當前位姿計算期望位姿,并判斷期望位姿是否滿足機械臂的工作空間;如果機械臂位姿處于工作空間內(nèi),則經(jīng)由關節(jié)角度計算模塊通過逆運動學模型求解機械臂關節(jié)的角度,并判斷各關節(jié)角度是否滿足關節(jié)限制,即考慮逆運動學解的存在性問題,如果逆運動學有多個解,則選擇機械臂每一個關節(jié)移動量最小的解。關節(jié)位置計算模塊通過運動學模型計算期望位姿下各關節(jié)空間位置,并判斷關節(jié)是否滿足笛卡爾空間限制。
三、水電站壩體檢測作業(yè)
ROV由于其實時性好、穩(wěn)定性強、續(xù)航時間長等優(yōu)勢能夠滿足絕大多數(shù)水利水電工程領域的應用需求,我國已將ROV應用于水利水電工程領域。其中有纜遙控水下機器人的應用主要包括水庫大壩閘門的水下檢測與清理,消力池的水下檢測,水庫大壩壩體的水下檢測。大壩閘門的水下檢測與清理作業(yè)是在閘門開啟前,確認閘門槽內(nèi)的異物狀況,如有必要應清理淤積異物,確保綜合評估認為不存在安全隱患,利用水下定位系統(tǒng)、水下多波束圖像聲納系統(tǒng),對ROV的水下位置進行確定,同時掌握水下建筑物的結構形狀。
后續(xù)操作人員可通過操作遙控手柄,將ROV遙控至閘門處。通過水下高清攝像和聲吶掃描的方式進行觀察。岸上操作人員通過操控機械臂可快速開展堆積物清理工作,并可通過圖像實時評估完成進度,為水壩閘門的落放提供了有利的安全保障,相較于潛水員水下作業(yè)具有安全性高、工作時間長、作業(yè)深度深、操作性簡便等優(yōu)點。
消力池的水下檢測作業(yè)中,在水質(zhì)較好的清水環(huán)境內(nèi),可利用ROV水下高清攝像以及機械手等設施,進行水下消力池底板的穩(wěn)定性檢測,采用多波束聲納圖像并結合水面光線輔助定向措施后,系統(tǒng)便能可清晰辨識消力池的輪廓及尺寸。大壩庫區(qū)面積大、水質(zhì)清,因此可以采用ROV進行具體的水下檢測,充分發(fā)揮ROV的水下優(yōu)勢。通過ROV攜帶的水下多波束圖像聲納系統(tǒng)對大壩壩體進行檢測,確定大壩的滲漏位置,再利用基于CNN的高清攝像技術對滲漏處進行視頻觀察,同時通過電腦存儲圖像資料及ROV的位置信息,為后期大壩壩體加固提供資料。
ROV在水利工程中的應用需要克服的3個工程作業(yè)的困難:
第一,ROV成本相對偏高,而且水利水電工程檢測任務越復雜,ROV 檢測成本會越高;
第二,ROV 操作要求高,操作員需要具備豐富的經(jīng)驗,需要熟悉設備和傳感器,同時需要具備海洋物理、空間幾何等方面知識和良好的心理素質(zhì);
第三,水下環(huán)境復雜多變,水流、能見度等因素都會影響 ROV 操作。
應用ROV水下作業(yè)仿真平臺可以有效解決上述3方面制約:預先規(guī)劃仿真方案,利用ROV水下作業(yè)仿真平臺進行方案預演,根據(jù)仿真結果調(diào)整檢測方案,可以節(jié)約檢測作業(yè)時間,減少作業(yè)成本;結合水庫壩體和三維地形數(shù)據(jù),不斷改變環(huán)境條件,通過ROV水下作業(yè)運動仿真平臺進行ROV檢測作業(yè)培訓,使操作員熟悉作業(yè)環(huán)境并積累經(jīng)驗;結合三維視景仿真和VR技術,將ROV的水下作業(yè)直觀展示給操作員,排除能見度和攝影機限制;結合VR技術觀察壩體裂縫和消力池輪廓的三維形態(tài),輔助檢測作業(yè)。
3.1 檢測目標和任務
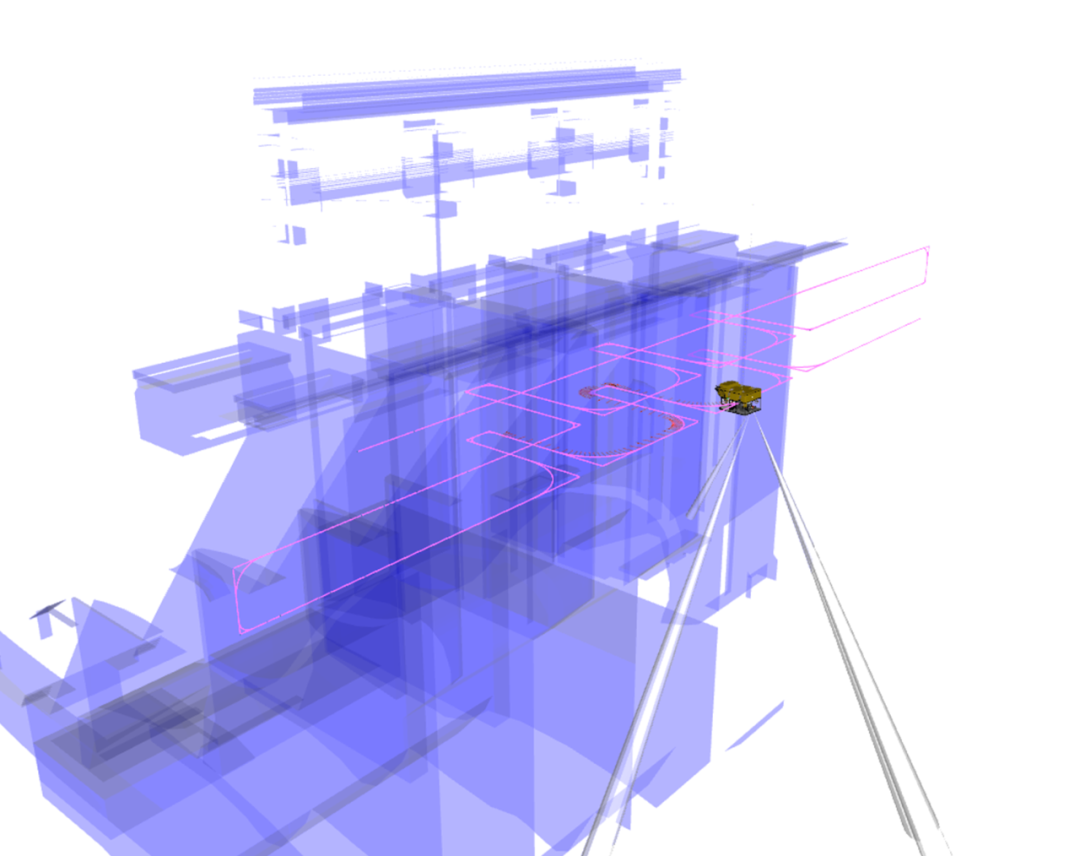
本文應用ROV作業(yè)仿真平臺對龔嘴水電站壩體進行檢測和清理作業(yè)仿真,龔嘴水電站位于四川省樂山市沙灣區(qū)與峨邊縣交界處的大渡河上,壩址以上流域面積 76130 km2,多年平均流量 1500 m3/s。攔河壩為混凝土實體重力壩,壩頂高程530.5m,壩頂全長447m;本次檢測作業(yè)選擇閘門段作為檢測作業(yè)仿真的研究對象,仿真對象寬85.3 m。仿真平臺中的壩體根據(jù)龔嘴水電站建模,壩體模型與龔嘴水電站閘門段一致。壩體檢測仿真有三個主要任務:1)預設ROV軌跡,基于路徑跟蹤技術掃描整個檢測區(qū)域,記錄掃描內(nèi)容,確定閘門異物位置;2)駕駛員手操ROV到達異物位置,操縱機械手清理異物。3)根據(jù)仿真結果,分析檢測作業(yè)的可行性,評估作業(yè)方案,提供優(yōu)化的意見。
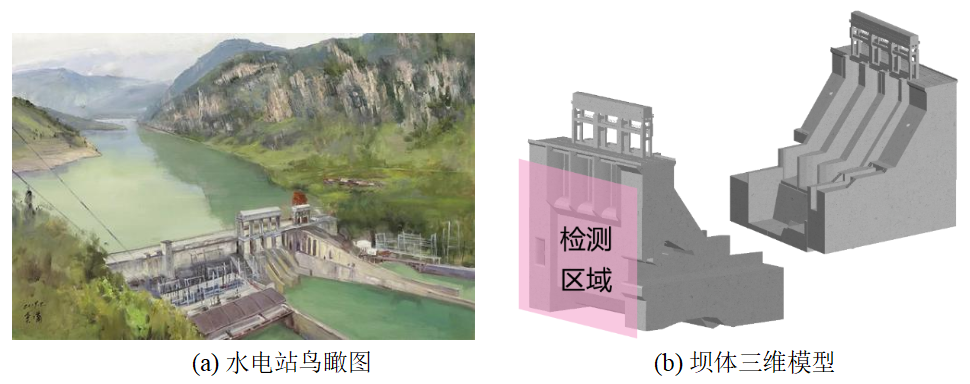
圖 7龔嘴水電站
3.2 檢測流程與步驟
龔嘴水電站壩體檢測和異物清理仿真流程主要包括4步:第一步,教練員選擇ROV的初始位置和姿態(tài),確定水下流速和流向等環(huán)境,然后領航員開始作業(yè)仿真;第二步,領航員根據(jù)閘門段結構特點,進行檢測路徑規(guī)劃。觀察ROV水下作業(yè)仿真平臺中仿真段壩體模型,確定閘門位置和尺寸,根據(jù)檢測區(qū)域和待檢測面積確定ROV的下潛深度以及ROV到壩體壁面的距離并設定路標點。
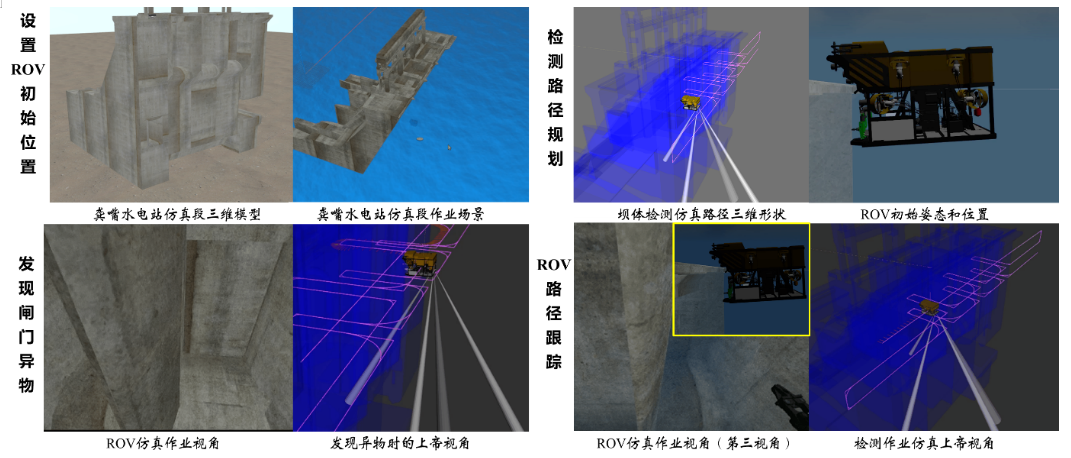
圖 8壩體檢測步驟一和二
第三步,領航員使用路徑跟蹤功能,使ROV沿預定路徑巡航,記錄攝像機影像,當發(fā)現(xiàn)閘門處異物時記錄坐標;在ROV檢測作業(yè)過程中,可以改變第三視角直觀感知ROV姿態(tài)和位置,觀察ROV是否與壩體壁面發(fā)生碰撞。第四步,當ROV的自動巡航檢測結束后,由領航員駕駛ROV到達閘門異物位置,通過機載攝影機觀察異物情況,通過操縱機械臂清理閘門異物。
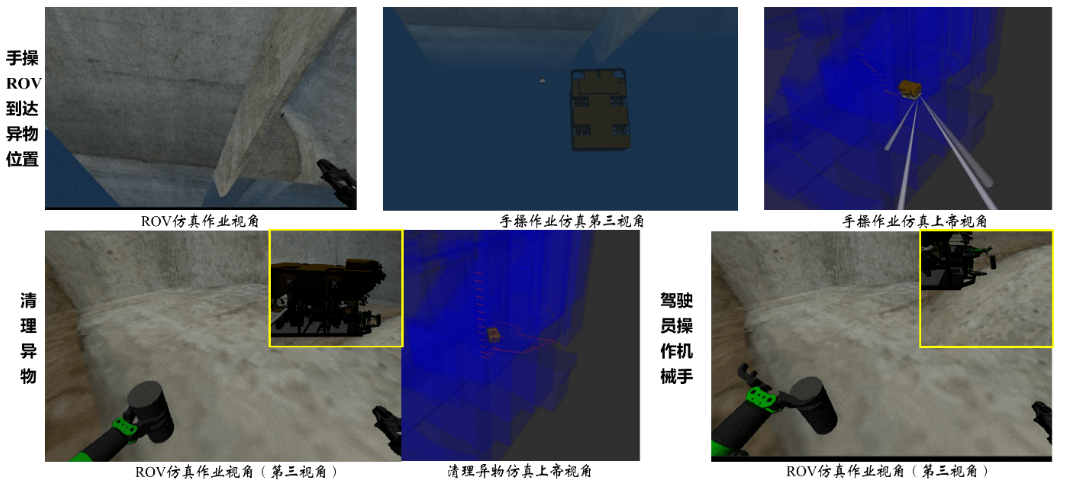
圖 9壩體檢測步驟三和四
3.3 壩體檢測仿真結果分析
ROV起始位置位于水壩北側水下10米位置,首先向南水平巡航,掃描水閘以外上部壩體,然后下潛5米向北巡航檢測水閘上部,檢測期間為了細致觀察水閘附近異物情況,ROV將探入水閘附近,并依次進行水平巡航檢測,檢測完畢后再下潛5米,向南檢測水閘下部,最后再水壩南側深20米處完成檢測。我們輸出了檢測全過程中的推進器推力,以及ROV的姿態(tài)角,其中姿態(tài)角經(jīng)由四元數(shù)換算得到。從仿真結果中發(fā)現(xiàn),當ROV轉艏時,推進器推力分布發(fā)生較大變化,改變推力的瞬間ROV速度出現(xiàn)極大的擾動,但由于進行發(fā)聵線性化的PID控制,推進器推力針對加速度反饋做出調(diào)整,使速度和角度迅速回歸期望值,所以檢測路徑較為光滑。
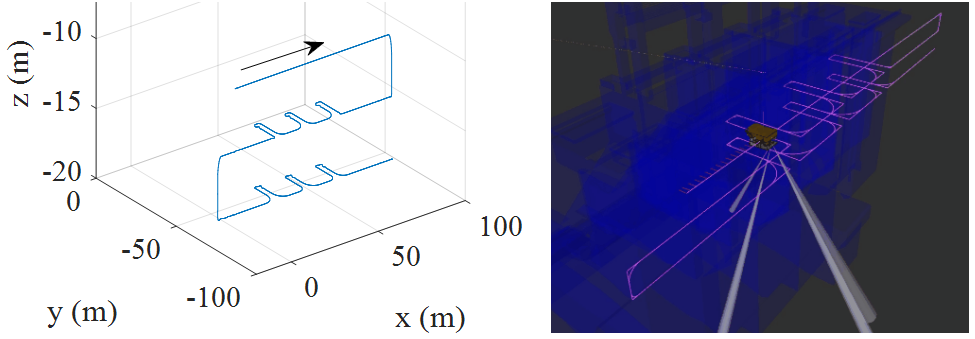
圖 10檢測路徑
仿真作業(yè)中ROV距離壩體壁面3.5 m,在垂向上重疊0.3 m;歐拉常數(shù)和ROV位置的誤差峰值主要發(fā)生在轉彎處,此時為改變ROV艏向,改變推力分配,產(chǎn)生了較大的擾動;歐拉常數(shù)中,旋轉角度誤差較大,縱向歐拉常數(shù)誤差最小;ROV位置中,東方向位置誤差最大,深度方向誤差最小;壩體檢測作業(yè)可針對歐拉常數(shù)的旋轉角度和東方向位置進行優(yōu)化,改變PID控制參數(shù);減小視野重疊,并調(diào)整規(guī)劃路徑的垂向位置。
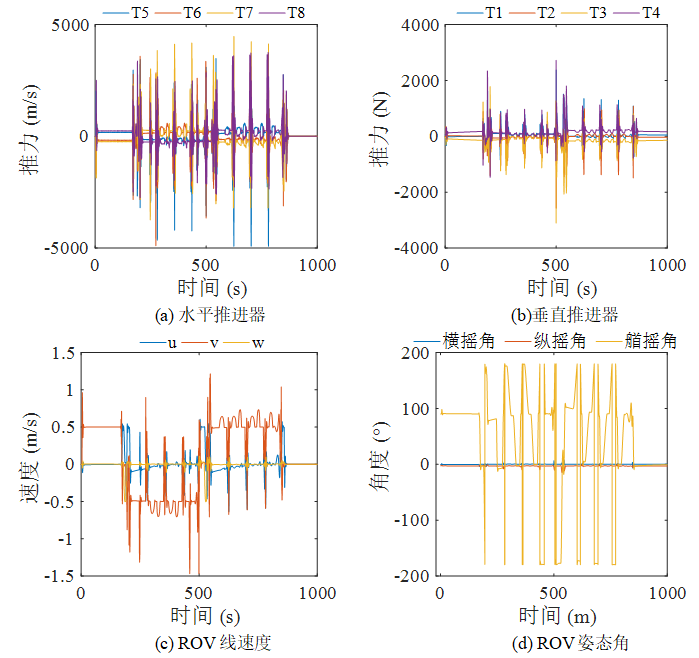
圖11ROV的推力和位姿
四、水下機器人建模與仿真公開課
本文介紹了ROV水下作業(yè)仿真平臺和龔嘴水電站壩體檢測,可以得到如下結論:
第一、基于ROV水下作業(yè)仿真平臺完成了壩體檢測和閘門異物清理作業(yè)預演,根據(jù)位姿和誤差等輸出結果對檢測和清理作業(yè)進行了評估;
第二、ROV水下作業(yè)仿真平臺進行相關水下作業(yè)具有實際的工程應用背景;ROV水下作業(yè)仿真平臺的開發(fā)不僅解決行業(yè)重大問題,仿真平臺可以在線模式并結合VR技術輔助實際水下作業(yè),可用于數(shù)字孿生體進一步研究;
第三、ROV水下作業(yè)仿真平臺仿真結果與模型實驗數(shù)據(jù)對標,ROV水下作業(yè)仿真平臺能夠較好的模擬了ROV和機械手的運動,與模型實驗相比基本吻合;
第四、ROV水下作業(yè)仿真平臺已經(jīng)應用于荔灣 3-1 氣田、文昌 9-2/9-3 氣田群等多個海洋工程項目,并且得到了驗證。基于開源框架開發(fā)的ROV水下作業(yè)仿真平臺,可以公開計算模型作為教學案例或行業(yè)研究學習。
為了幫助大家更好理解ROV作業(yè)仿真,2月27日,仿真秀機器人工業(yè)品仿真第六期講座《水下機器人建模方法與仿真分析技術》將邀請筆者帶來《水下機器人建模方法與仿真分析技術》線上公開課。本期講座將概述水下機器人及其作業(yè)仿真技術的背景,介紹ROV水下作業(yè)仿真的建模方法和關鍵技術,討論水下機器人作業(yè)仿真技術的發(fā)展方向和應用前景,最后展示ROV的水電站壩體檢測作業(yè)仿真。
審核編輯 :李倩
-
仿真
+關注
關注
50文章
4185瀏覽量
134882 -
水下機器人
+關注
關注
2文章
95瀏覽量
13866 -
ROV
+關注
關注
2文章
10瀏覽量
15987
原文標題:ROV水下作業(yè)仿真平臺:龔嘴水電站壩體檢測和清理作業(yè)仿真
文章出處:【微信號:sim_ol,微信公眾號:模擬在線】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
水電站計算機監(jiān)控系統(tǒng)干擾的主要來源
水電站下泄計量設備
資料分享:水電站下泄生態(tài)流量監(jiān)控解決方案
水電站計算機論述
什么是全數(shù)字仿真平臺
什么是全數(shù)字仿真平臺
基于PC的水下作業(yè)控制系統(tǒng)的研究
基于模糊推理水下作業(yè)系統(tǒng)運動控制研究
三維虛擬仿真平臺,三維虛擬仿真平臺是什么意思

遙控機器人在深水A油田臥式采油樹作業(yè)中的應用資料說明

集成電路 | 電站虛擬仿真技術在高職實踐性教學中的應用
小水電站生態(tài)流量監(jiān)管平臺

水電站生態(tài)下泄流量監(jiān)測系統(tǒng):實時捕捉流量的細微變化






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論