 4自由度串聯機械臂的制作
4自由度串聯機械臂的制作
1. 運動功能說明
R204樣機是一款擁有4個自由度的串聯機械臂。本文示例實現4自由度串聯機械臂抓取物品、放下的功能。

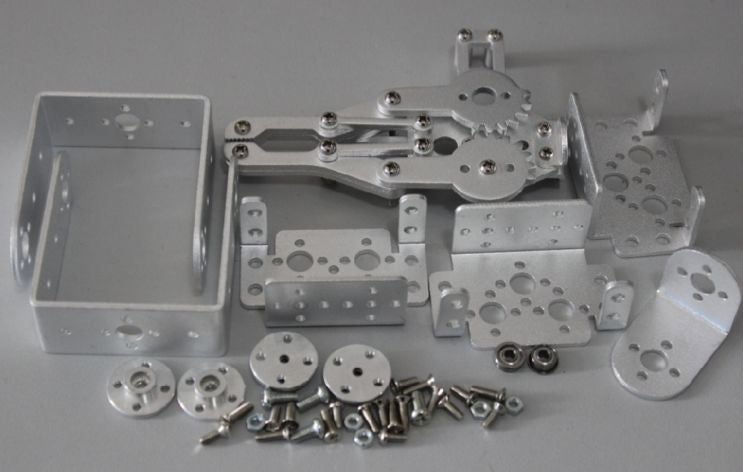
2. 結構說明
R204號樣機由4個串聯的 舵機關節模組 和1個 舵機夾爪模組 組成。

為了增加減輕腰關節的負擔,在腰關節位置加裝了4根拉簧。
3. 運動功能實現
3.1 電子硬件
在這個示例中,我們采用了以下硬件,請大家參考:
| 主控板 | Basra(兼容Arduino Uno) |
| 擴展板 | Bigfish2.1 |
| 電池 | 7.4V鋰電池 |
3.2 編寫程序
編程環境:Arduino 1.8.19
編寫并燒錄以下程序(grab_thing_anwser.ino),該程序將實現演示動圖中的動作【詳細例程源代碼請參考 https://www.robotway.com/h-col-189.html】
/*------------------------------------------------------------------------------------ 版權說明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 機器譜 2023-02-02 https://www.robotway.com/ ------------------------------ 實驗功能: 實現4自由度串聯機械臂抓取物品、放下的功能 ----------------------------------------------------- 實驗接線:舵機接口依次D8、D3、D11、D7、D4 ------------------------------------------------------------------------------------*/ int a=0,b=0,c=0,d=0,e=0,f=0; #include Servo servo_pin_4; Servo servo_pin_7; Servo servo_pin_11; Servo servo_pin_3; Servo servo_pin_8; void setup() { servo_pin_4.attach(4); servo_pin_4.write( 76); servo_pin_7.attach(7); servo_pin_7.write( 110); servo_pin_11.attach(11); servo_pin_11.write(68); servo_pin_3.attach(3); servo_pin_3.write(157); servo_pin_8.attach(8); servo_pin_8.write(81); delay(3000);//set up the initial posotion.Each servo is different, // so u must use Software of Processing to monitor your initial positions of servo. } void loop() { int a=76;b=110;c=68;d=157;e=81; servo_pin_4.write(a); servo_pin_7.write(b); servo_pin_11.write(c); servo_pin_3.write(d); servo_pin_8.write(e); //Now begin to move,you can use Processing to record a serials of movements. //Here's my records.Aiming to grab a thing and put it back. for(e=80;e>=50;e-=1) {servo_pin_8.write(e);delay(30);} for(d=158;d>=62;d-=3) {servo_pin_3.write(d);delay(30);} for(b=110;b>=19;b-=3) {servo_pin_7.write(b); delay(30);} for(e=50;e<=80;e+=1) {servo_pin_8.write(e);delay(30);} for(b=19;b<=110;b+=3) {servo_pin_7.write(b);delay(30);} delay(3000); for(b=110;b>=19;b-=3) {servo_pin_7.write(b);delay(30);} for(e=80;e>=50;e-=1) {servo_pin_8.write(e);delay(30);} for(b=19;b<=110;b+=3) {servo_pin_7.write(b);delay(30);} for(d=62;d<=158;d+=3) {servo_pin_3.write(d);delay(30);} for(e=50;e<=81;e+=1) {servo_pin_8.write(e);delay(30);} }
審核編輯黃宇
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
串聯
+關注
關注
6文章
424瀏覽量
37598 -
機械臂
+關注
關注
12文章
515瀏覽量
24609
發布評論請先 登錄
相關推薦
采用LabVIEW實現四自由度機械臂運動控制系統設計
應用領域:控制設計挑戰: 短期內實現4自由度機械臂(3臺交流伺服電機、1臺微型直流電機)的 變參數同步運動控制,為鋼絲傳動機構的控制提供應用解決方案。應用方案: 方案采用NI公司
發表于 05-06 09:26
欠驅動兩自由度機械臂的模糊控制
分析了欠驅動兩自由度機械臂主、被動關節間的動力學耦合特性,指出了被動關節處于不同位置時耦合特性的差異。針對主、被動關節間的動力學耦合特性及其差異,提出了兩種
發表于 08-04 15:51
?27次下載

并聯機器人的少自由度并聯機構設計
理想的少自由度并聯機構的所有分支最好具有完全相同的結構,保持結構的對稱,以滿足各向同性的要求。以單開鏈支路為單元,提出了一種新型的對稱的少自由度的并聯機器人機構。研究結果表明,該機構的
發表于 10-23 16:24
?15次下載
分享最好的機械臂是7個自由度的原因
現在用的最多的工業機器人,一般都是六軸的,但是最近推出來的人機協作機械臂,卻有7個自由度,一直想不明白為什么。直到最近看到知乎上的一個問題:人的手臂(腕關節到肩關節)有幾個自由度?才發

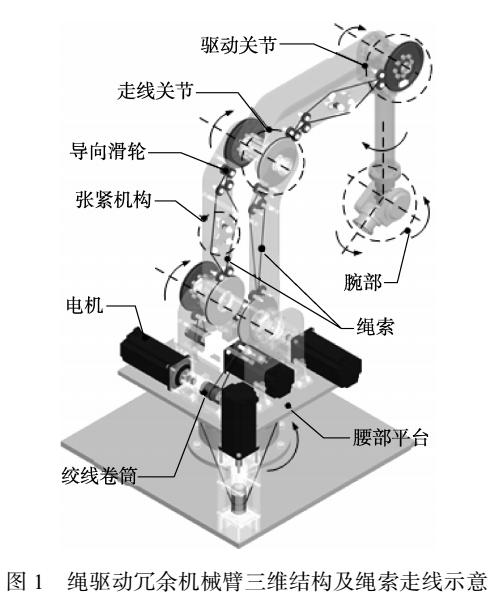
一種新型7自由度冗余繩驅動機械臂
針對傳統機械臂負載白重比小、臂身慣量大、人機交互安全性弱等問題,對繩驅動機械臂的結構、繩驅關節耦合、冗余運動學等方面進行了研究,創新設計了一
發表于 02-27 14:33
?7次下載
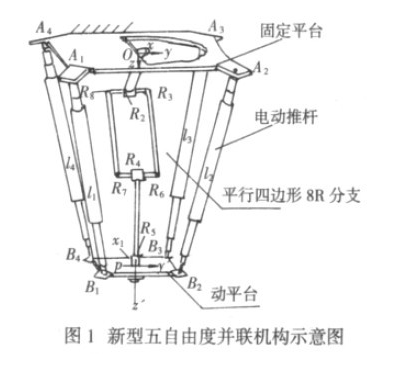
運用BLDC對新型五自由度并聯機器人的設計
積累和放大、位置反解容易等優點, 與串聯機構在應用上形成了互補關系。目前, 對并聯機器人研究較多的是6 自由度( 6DOF) 并聯機器人, 但在某些場合2~5 個
為什么最好的機械臂是7個自由度而不是6個自由度
現在用的最多的工業機器人,一般都是六軸的,但是最近推出來的人機協作機械臂,卻有7個自由度,一直想不明白為什么。
使用SimMechanics實現六自由度的機械臂仿真研究
,仿真功能強大,可以在模型中通過改變結構,優化系統參數,在仿真環境中分析結果。利用 SimMechanics 的上述優點,以工業六自由度機械臂 ER10 為研究對象,將 SolidWorks 建立好的
發表于 11-12 08:00
?1次下載

3自由度串聯機械臂實現電磁鐵搬運功能
1、功能描述 ? ? ?R308樣機是一款擁有3自由度的串聯機械臂。本文提供的示例所實現的功能為:在3自由度串聯機械






 工商網監
工商網監
評論