") 完整的獨(dú)立GPS接收機(jī)方案,采用MAX2742
完整的獨(dú)立GPS接收機(jī)方案,采用MAX2742
使用MAX2742集成CMOS RF前端GPS接收器,只需極少的外部元件即可實(shí)現(xiàn)完整的GPS解決方案。
介紹
MAX2742為CMOS、單芯片、GPS前端下變頻器。這款先進(jìn)的器件功耗非常低(32.2V時(shí)為4mW),無(wú)需昂貴的中頻SAW濾波器或笨重的分立中頻帶通濾波器。MAX2742集成了低噪聲放大器(LNA)、混頻器、BPF、自動(dòng)增益控制放大器(AGC)、本振頻率合成器、時(shí)鐘緩沖器和內(nèi)部數(shù)字采樣器。
該器件可與許多商用GPS基帶IC接口。它適用于許多應(yīng)用,包括車輛導(dǎo)航、遠(yuǎn)程信息處理、自動(dòng)安全、資產(chǎn)跟蹤、基于位置的服務(wù) (LBS) 和消費(fèi)電子產(chǎn)品。對(duì)于完整的GPS RF解決方案而言,設(shè)備周圍所需的外部組件最少。系統(tǒng)框圖可以在下一節(jié)中找到。
MAX2742采用18.414MHz*晶體或TXCO工作,提供1.023MHz的差分或單端**中頻輸出。總信號(hào)轉(zhuǎn)換增益為120dB,噪聲系數(shù)為4.5dB。IF信號(hào)以18.414MHz的參考時(shí)鐘速率采樣。
*注:18.414MHz是18.1MHz的023倍,是GPS基頻10.23MHz的十分之一。
** 注意:有三個(gè)IF輸出引腳——一對(duì)差分輸出和一個(gè)單端輸出。選擇由引腳 10 控制。
完整的 GPS 射頻前端解決方案
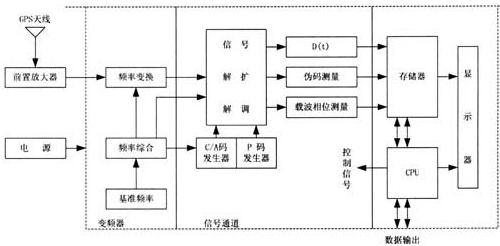
圖1顯示了Maxim完整GPS RF解決方案的重要構(gòu)建模塊和特性。構(gòu)建塊的說(shuō)明可在表 1 中找到;級(jí)聯(lián)性能如表2所示。圖2所示為GPS接收機(jī)RF部分與MAX2742的應(yīng)用電路。
圖1.GPS射頻前端框圖。
表 1.射頻部分系統(tǒng)構(gòu)建模塊
| Block | 描述 | 注意 |
| 全球定位系統(tǒng)天線 | 有源GPS天線,通常具有~1.5dB NF和~20dB增益 | |
| 液化天然氣 | MAX2641/MAX2654/MAX2655 LNA | 當(dāng)可能不存在有源 GPS 天線時(shí),需要外部 LNA。 |
| 射頻聲波 | RF帶通濾波器以1575.42MHz為中心 | 射頻 BPF 是干擾器抗擾度所必需的 |
| 電源管理 | MAX8510低噪聲LDO | |
| 射頻下變頻器 | MAX2742 | |
| 參考時(shí)鐘 | 18.414MHz晶體/TCXO | |
| 數(shù)字信號(hào)處理器 | 基帶處理器 |
表 2.系統(tǒng)級(jí)聯(lián)性能
| 規(guī)范 | 級(jí)聯(lián)性能 | 注意 |
| 獲得 | 131分貝 | 無(wú)有源天線,假設(shè)外部LNA增益為15dB,BPF損耗為3dB,匹配網(wǎng)絡(luò)損耗為1dB |
| 噪聲系數(shù) | 1.9分貝 | 無(wú)有源天線,假設(shè)外部LNA NF為1.5dB |
| 功耗 | 20毫安 | 以MAX2744+MAX2654為例 |
圖2。MAX2742的GPS射頻部分原理圖
完整的獨(dú)立 GPS 接收器解決方案
除了RF加基帶IC之外,還有更多構(gòu)建模塊來(lái)構(gòu)建完整的GPS接收器。如圖3所示,需要一個(gè)額外的天線電源控制模塊、一個(gè)RESET電路和一個(gè)延遲電路。構(gòu)建塊的說(shuō)明可在表 3 中找到;級(jí)聯(lián)性能如表4所示。
圖3.完整的GPS接收機(jī)解決方案框圖。
表 3.系統(tǒng)構(gòu)建塊
| Block | 描述 | 注意 |
| 全球定位系統(tǒng)天線 | 全球定位系統(tǒng)天線 | 有關(guān)詳細(xì)信息,請(qǐng)參閱 RF 部分。 |
| 液化天然氣 | MAX2654 LNA | 有關(guān)詳細(xì)信息,請(qǐng)參閱 RF 部分。 |
| 射頻聲波 | 射頻帶通 | 有關(guān)詳細(xì)信息,請(qǐng)參閱 RF 部分。 |
| 電源管理 | MAX8510低噪聲LDO | |
| 射頻下變頻器 | MAX2742 | |
| 參考時(shí)鐘 | 18.414兆赫 TCXO | TCXO還提供基帶時(shí)鐘。在該參考設(shè)計(jì)中,不使用MAX2742的GPS時(shí)鐘輸出。 |
| 全球定位系統(tǒng)基帶 | 索尼 CXD2932 | CXD2932 還控制有源天線供電、復(fù)位功能。詳情見下文。 |
| 天線控制塊 | 采用 p-MOSFET 和檢流電阻器的天線電源控制 | 檢測(cè)電阻將天線電源信息反饋給CXD2932。有三種可能的情況:正常、短期和開放。 |
| 復(fù)位/延遲電路 | CXD2932 所需的不同復(fù)位級(jí)別和延遲電路 | 為確保成功啟動(dòng),CXD2932需要兩個(gè)相隔100ms的RESET信號(hào)。 |
| 基帶接口 | TX:外部控制命令 | |
| 接收:全球定位系統(tǒng)數(shù)據(jù)輸出 | 數(shù)據(jù)速率可編程 | |
| 1PPS:每秒一個(gè)脈沖信號(hào) | 該信號(hào)與GPS原子鐘對(duì)齊。 |
圖 4
顯示了參考設(shè)計(jì)的實(shí)際 PCB 布局。完整的解決方案僅占用 25mm x 25mm 的印刷電路板空間。
圖4。GPS 接收器印刷電路板布局.
表 4.模塊性能(LNA + MAX2742 + 索尼 CXD2932)
| No. | 參數(shù) | Symbol | 條件 | 系統(tǒng)規(guī)格 | Maxim Target | 量過(guò)的 | 單位 |
| 1 | 電源 | VCC | (注1) | 2.7 ~ 3.6 |
T.C. |
V | |
| 2 | 電流消耗 | ICC | Vcc= 3.0V | 91 | 88 | mA | |
| 3.1 | 敏感性 | Sens | Acquisition | Tracking | -145 | -145 | dBm |
| 3.2 | -138 | -138 | |||||
| 4 | 特夫 | TFC | 冷啟動(dòng) | 58(典型值) | 60(最大) | s | |
| 5 | TFW | 熱啟動(dòng) | 45 | 30(最大) | s | ||
| 6 | TFH | 熱啟動(dòng) | 17 | 6(最大) | s | ||
| 7 | 位置漂移范圍 | PR | 95%的可能性 | 100 | 90 | ft | |
| 8 | 1PPS 輸出精度 | 1PPS | 1 |
N.M. |
ns |
注1:T.C.=測(cè)試條件,N.M.=未測(cè)量
審核編輯:郭婷
-
芯片
+關(guān)注
關(guān)注
455文章
50726瀏覽量
423177 -
CMOS
+關(guān)注
關(guān)注
58文章
5710瀏覽量
235423 -
濾波器
+關(guān)注
關(guān)注
161文章
7797瀏覽量
177999 -
變頻器
+關(guān)注
關(guān)注
251文章
6548瀏覽量
144523
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
MAX2742 pdf
GPS和DGPS概述和完整的RF前端設(shè)計(jì)
GPS接收機(jī)自主完整性監(jiān)視(RAIM)的最小二乘算
基于AT642的便攜式GPS接收機(jī)的設(shè)計(jì)
國(guó)內(nèi)外測(cè)地型GPS接收機(jī)簡(jiǎn)介
GPS接收機(jī)射頻前端電路原理與設(shè)計(jì)
GPS\DGPS概述和基于Maxim GPS芯片的RF前端設(shè)
ARM核在GPS接收機(jī)的解決方案

用MAX2742構(gòu)建GPS接收機(jī)
微型GPS接收機(jī)的設(shè)計(jì)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論