 淺析運動規劃、路徑規劃、軌跡規劃
淺析運動規劃、路徑規劃、軌跡規劃
來源:古月居
1. 運動規劃
讓我們從移動機器人運作的流程中來看待規劃的作用
然后將這些信息進行處理,一方面讓機器人知道自己的位置(定位),一方面存儲關于周圍環境位置的信息(建圖),SLAM(同時定位與建圖)是最近比較火的一個研究熱點
收集到足夠的位置信息和地圖信息后,就進入到了規劃階段,規劃用來解決怎么走的問題,路徑規劃和軌跡規劃統稱為運動規劃
運動規劃完成后,就編寫實際的控制程序,使機器人移動到目標位置了

移動機器人運作流程
2. 路徑規劃VS軌跡規劃
2.1 路徑&路徑規劃
路徑是構型空間中連續的曲線(所謂構型空間就是機器人能到達的所有的點)[1],下圖直觀地展示了從c(0)到c(1)的一個路徑.
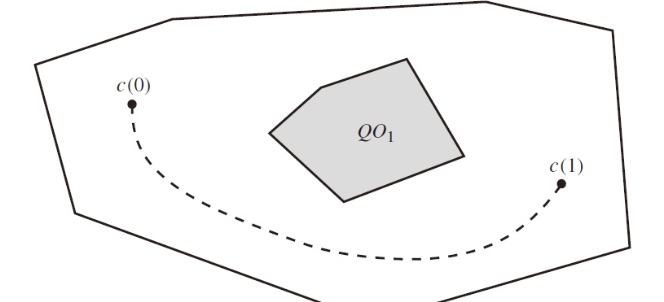
路徑(圖中虛線)
路徑數學上用c(s)表示,具體含義如下.

所以路徑規劃,就是在已知幾何約束(比如障礙物,地圖等)情況下求解路徑.
2.2 軌跡&軌跡規劃
機器人移動過程中,控制器提供了用于跟蹤的一系列目標位置和目標速度.機器人的位置/時間函數就叫做軌跡[2].對它分別進行一次/二次求導就可以得到機器人的速度/加速度信息.
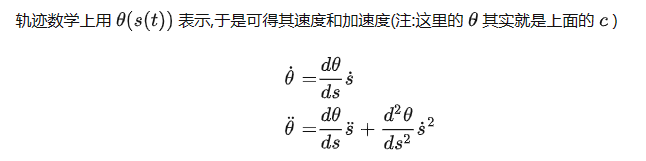
所以軌跡規劃,就是在已知時間約束(限定多長時間到達)速度約束(速度最高能到多少)的情況下求解軌跡.其中路徑可能已知,可能未知.
審核編輯:湯梓紅
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
傳感器
+關注
關注
2550文章
51035瀏覽量
753082 -
機器人
+關注
關注
211文章
28380瀏覽量
206918 -
移動機器人
+關注
關注
2文章
762瀏覽量
33564 -
路徑規劃
+關注
關注
0文章
78瀏覽量
15321 -
軌跡規劃
+關注
關注
0文章
3瀏覽量
5781
原文標題:淺析運動規劃、路徑規劃、軌跡規劃
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
運動控制速度規劃
電機控制速度規劃是運動控制的一大關鍵點。這里提供一個討論話題的平臺,大家可以在這里分享自己的心得!有啥關于速度好的想法,或者覺得有意思的資料可以發到這里,大家分享!
發表于 09-04 11:38
路徑規劃 人工勢場
我現在在做機器人的路徑規劃,想用人工勢場的算法,通過用這個labview仿真,就是給定一些起始點,終點,還有這個障礙物的坐標,中間是這個算法計算出來的一些點,能夠在執行算法的時候用labview描出這些點,最終形成一條規劃好的
發表于 05-15 15:25
介紹一種永磁同步電機控制的軌跡規劃方案
位置到目標位置的過渡過程進行軌跡規劃,本文將介紹三次多項式速度軌跡,數學計算簡單,速度曲線光滑連續,適合伺服電機軌跡規劃。2.數學模型在伺服
發表于 10-12 14:51

機器人路徑規劃算法,全局路徑規劃與局部路徑規劃究竟有哪些區別
路徑規劃是移動機器人導航最基本的環節,指的是機器人在有障礙物的工作環境中,如何找到一條從起點到終點適當的運動路徑,使機器人在運動過程中能安全
決策規劃系列:運動規劃常用算法
有了全局路徑參考信息,有了局部環境信息了,有了行為決策模塊輸入的決策信息,下一步自然而然的就要進行運動規劃,從而生成一條局部的更加具體的行駛軌跡,并且這條
自動駕駛之路徑規劃
從 周圍車輛預測;軌跡初始化;避障優化軌跡 等角度介紹軌跡規劃。 然而這些文章不夠全面和系統,不免產生盲人摸象的感覺,這里結合百度Apollo較為系統和全面的介紹次
發表于 06-01 15:12
?0次下載

全局路徑規劃RRT算法原理
無人駕駛路徑規劃 眾所周知,無人駕駛大致可以分為三個方面的工作:感知,決策及控制。 路徑規劃是感知和控制之間的決策階段,主要目的是考慮到車輛動力學、機動能力以及相應規則和道路邊界條件下





 工商網監
工商網監
評論