 基于FreeRTOS和RISC-V的USB PD協議實現
基于FreeRTOS和RISC-V的USB PD協議實現
1 FreeRTOS簡介
FreeRTOS 是市場領先的面向微控制器和小型微處理器的實時操作系統(RTOS),與世界領先的芯片公司合作開發。FreeRTOS 通過 MIT 開源許可免費分發,包括一個內核和一組不斷豐富的庫,適用于所有行業領域。FreeRTOS 的構建強調可靠性和易用性。FreeRTOS 的主要功能可以歸結為以下幾點:
優先級調度、相同優先級任務的輪轉調度,同時可設成可剝奪內核或不可剝奪內核
任務可選擇是否共享堆棧(co-routines& tasks),并且沒有任務數限制
消息隊列,二值信號量,計數信號量,遞歸互斥體
時間管理
內存管理
1.1 FreeRTOS特點:
FreeRTOS的特點:
小型節能內核 大小可擴展,可用程序內存占用低至 6KB。一些架構包括無滴答的節能模式;
支持 40 多種架構 代碼庫支持 40 多種 MCU 架構和15 多種工具鏈,包括最新的 RISC-V 和 ARMv8-M (Arm Cortex-M33) 微控制器;
模塊化庫 越來越多的加載項庫,適用于所有行業領域,包括安全的本地或云連接;
AWS參考集成 利用經過測試的示例,其中包括安全連接到云所必需的所有庫;
MIT許可,有選項 FreeRTOS 可根據MIT 許可用于任何目的。提供商業許可,以及安全認證。
2 RISC V簡介
RISC-V是加州大學伯克利分校(University of California at Berkeley)設計并發布的一種開源指令集架構,其目標是成為指令集架構領域的Linux,應用覆蓋IoT(Internet of Things)設備、桌面計算機、高性能計算機等眾多領域。
RISC-V讀作RISC Five,意思是第五代精簡指令處理器。取這個名字只是因為美國伯克利研究團隊的David Patterson教授在此之前已經研制了四代精簡指令處理器芯片。
RISC-V是由UC-Berkeley團隊在歷代RISC架構基礎上,總結多個ISA 優缺點而重新創建的一種新式ISA, 它采取“開源”的模式對全世界開放,希望成為一切計算設備都可以采用的指令集架構。它的開放性允許它可以自由地被用于任何目的,允許任何人設計、制造和銷售基于RISC-V的芯片或軟件,這種徹底的開放性在處理器領域還是第一次。
2.1 RISC-V的特點
首先是開源的優勢:
任何公司和個人不需任何費用就可以自由使用RISC-V,不像ARM指令集需要支付高昂授權費,也不像英特爾不開放內核,只允許用戶基于微處理器進行應用開發。
RISC-V的開源會大大降低指令集修改和定制的門檻,在實現芯片差異化設計的同時降低成本,對發展自主可控處理器、擺脫壟斷有著十分重要的意義。
其次是功能優勢:
RISC-V架構的篇幅很短,不用背負向后兼容的歷史包袱;
模塊化的靈活設計,RISC-V可根據特定應用場景對指令集進行裁剪或修改;
RISC-V支持可擴展定制指令;
RISC-V硬件設計與編譯器實現起來非常簡單。
3 基于FreeRTOS & RISC V內核的PD協議的應用
3.1 UM3506 PD SoC
廣芯微旗下雙向PD快充控制器芯片UM3506 (TID: 2465), 采用軟硬結合的靈活可編程架構,全面支持PD3.1 SRC, SNK, 雙向DRP和 EMARK功能,其中包括SPR下的PPS和ERP下的AVS動態電壓模式,同時還可支持EPR線纜中PD 3.1 EMARK模式。
UM3506芯片采用TCPM/TCPC分層架構,集成原生的TCPC-like前端模塊,包括用于Type-C接口檢測與控制的數字邏輯和模擬電路,PD PHY層的分組BMC編解碼以及PD協議層中對時序有嚴格要求的關鍵功能,同時創新地集成了基于RISC-V 指令集的32位微處理器內核,大容量FLASH閃存/SRAM存儲器、增強的外設接口和豐富的系統資源。
3.2 應用案例
USB PD EMARK數顯線,自帶0.96寸液晶屏幕,在內置EMARK功能從而支持100W功率傳輸的同時,還可通過屏幕顯示電壓電流等參數,實時了解設備用電信息。通過內置16通道12位ADC配合采樣電阻采集電流信息,并采集母線電壓信息。
項目使用FreeRTOS, FreeRTOS 的實現主要由 list.c、queue.c、croutine.c 和 tasks.c 4 個文件組成。list.c 是一個鏈表的實現,主要供給內核調度器使用;queue.c 是一個隊列的實現,支持中斷環境和信號量控制;croutine.c 和 task.c 是兩種任務的組織實現。協程(英文為 croutine)是采用各任務共享同一個堆棧, 使 RAM 的需求進一步縮小,但也正因如此,他的使用受到相對嚴格的限制。而 task 則是傳統的實 現,各任務使用各自的堆棧,支持完全的搶占式調度。
3.2.1 FreeRTOS移植
3.2.1.1 portmacro.h 頭文件
portmacro.h頭文件主要包括兩部分內容。第一部分定義了一系列內核代碼中用到的數據類型,第二部分包含了實現 FreeRTOS 移植所需要定義的函數。包括與架構相關的定義、內核調度、臨界區管理、任務優化等。
1.數據類型定義
定義編譯器相關的各種數據類型。
#define portCHAR char
#define portFLOAT float
#define portDOUBLE double
#define portLONG long
#define portSHORT short
#define portSTACK_TYPE unsigned portLONG
#define portBASE_TYPE long
2.架構相關的定義
定義與處理器或控制器架構相關的宏定義。
#define configUSE_16_BIT_TICKS 0 //處理器字長為32 位
#define portSTACK_GROWTH -1 //定義堆棧的生長方向逆向生長
//定義心跳時鐘周期,表示的是相鄰Tick間間隔多少ms
#define portTICK_RATE_MS((portTickType)1000/configTICK_RATE_HZ)
//訪問SRAM的字節對齊
#define portBYTE_ALIGNMENT 8
3.內核調度函數
/* 聲明該函數定義在其它文件中,實現強制上下文切換,用在任務環境中調用 */
extern void vPortYieldFromISR( void );
#define portYIELD() vPortYieldFromISR()
/* 強制上下文切換,在中斷處理環境中調用 */
#define portEND_SWITCHING_ISR(xSwitchRequired)if(xSwitchRequired)
vPortYieldFromISR()
3.2.1.2port.c 源文件
1.堆棧初始化
進行堆棧的初始化,使堆棧處于預知的確定狀態。下面是堆棧初始化的代碼實現。
StackType_t*pxPortInitialiseStack( StackType_t *pxTopOfStack, TaskFunction_t pxCode, void*pvParameters )
{
/* 計算存儲程序狀態寄存器xPSR的堆址,用于MCU在進入或退出中斷時恢復現場*/ register int *tp asm("x4");
pxTopOfStack--;
/* 程序狀態寄存器的值保存于堆棧中 */
*pxTopOfStack = (portSTACK_TYPE)pxCode;
pxTopOfStack -= 22;
*pxTopOfStack = (portSTACK_TYPE)pvParameters;
pxTopOfStack -= 6;
*pxTopOfStack = (portSTACK_TYPE)tp;
pxTopOfStack -= 3;
*pxTopOfStack = (portSTACK_TYPE)prvTaskExitError;
return pxTopOfStack;
}
2.啟動任務調度
portBASE_TYPE xPortStartScheduler( void )
{
/* 讓任務切換中斷和心跳中斷位于最低的優先級,使更高優先級可以搶占MCU */
*(portNVIC_SYSPRI2) |= portNVIC_PENDSV_PRI;
*(portNVIC_SYSPRI2) |=portNVIC_SYSTICK_PRI;
/* 啟動定時器,開始產生系統的心跳時鐘,此處中斷已被關閉 */
prvSetupTimerInterrupt();
/* 初始化臨界區的嵌套的個數,準備啟動第一個任務 */
uxCriticalNesting = 0;
/* 啟動第一個任務 */
vPortStartFirstTask();
/* 執行到vPortStartFirstTask函數,內核已經開始正常的調度 */
return 0;
}
FreeRTOS首先為剛創建的任務分配所需內存,若分配成功,則初始化任務名稱、堆棧深度和任務優先級,然后根據堆棧的增長方向初始化任務控制塊的堆棧。接著,FreeRTOS把當前創建的任務加入到就緒任務鏈表。當進行任務調度時,調度算法首先實現優先級調度。系統按照優先級從高到低的順序從就緒任務鏈數組中選擇當前最高就緒優先級,據此實現優先級調度。若此優先級下只有一個就緒任務,則該任務進入運行狀態,若此優先級下有多個就緒任務 則需采用輪換調度算法實現多任務輪流執行。
3.2.2 項目軟件實現
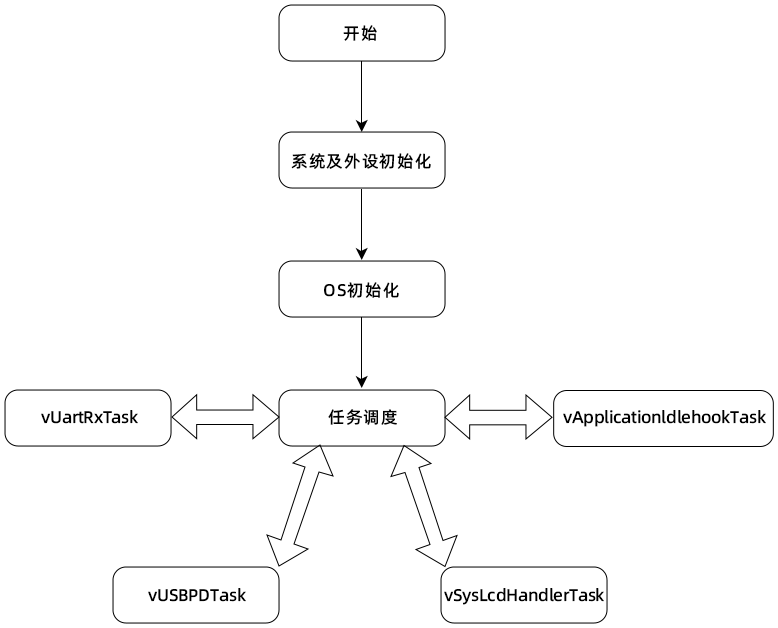
本項目采用Eclipse IDE,系統上電之后,系統進行硬件和時鐘初始化,MCU和操作系統的工作方式和工作狀態進入準備階段,除了空閑任務,還創建了三個任務:
(1)vUSBPDTask應用于處理PD協議,EMARK信息處理,充電方向,電壓、電流數據采集并計算功率,耗電功率等數據,最高優先級;
(2)vUartRxTask串口數據接收任務,用于系統調試,第二優先級;
(3)vSysLcdHandlerTask顯示任務,可以通過按鍵切換各個顯示界面,為了在各個狀態下顯示界面不被打亂,創建 了g_sys_lcd_info.bus_lock互斥信號量,顯示電壓、電流、功率、充電方向、用電功率等信息,第三優先級;
顯示任務執行耗時最長,vUSBPDTask需要快速響應,可以搶占其他任務從而確保PD信息的及時響應和處理,又不影響顯示屏幕的顯示效果。
軟件流程圖如下:
本項目產品已經批量生產,實現實時多任務操作的同時縮短開發周期,保證了產品實時處理EMARK信號、準確快速采集電壓電流等信息、顯示流暢,廣受客戶歡迎。
UM3506的DEMO軟件已經做好了FreeRTOS的移植,客戶可以很方便地根據需求創建自己的任務,快速開發產品。
審核編輯:湯梓紅
-
usb
+關注
關注
60文章
7936瀏覽量
264476 -
操作系統
+關注
關注
37文章
6801瀏覽量
123283 -
PD
+關注
關注
4文章
473瀏覽量
43970 -
FreeRTOS
+關注
關注
12文章
484瀏覽量
62140 -
RISC-V
+關注
關注
45文章
2270瀏覽量
46129 -
廣芯微電子
+關注
關注
0文章
33瀏覽量
190
原文標題:基于FreeRTOS & RISC-V的USB PD協議實現
文章出處:【微信號:廣芯微電子,微信公眾號:廣芯微電子】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論