 如何集成GaN功率級以實現高效的電池供電BLDC電機推進系統
如何集成GaN功率級以實現高效的電池供電BLDC電機推進系統
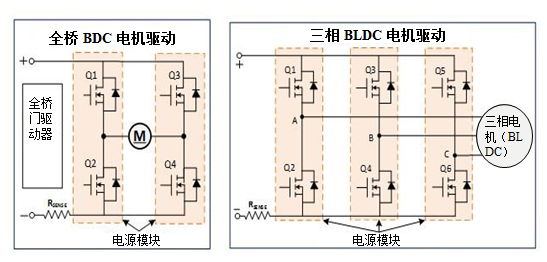
電池供電的應用,如協作機器人 (cobot)、電動自行車、工業無人機和電動工具等,都需要體積小、重量輕、功能強大的電機。無刷直流 (BLDC) 電機是一個不錯的選擇,但電機驅動電子元件相當復雜,有許多設計考慮因素。設計人員必須精密調節轉矩、速度和位置,同時還要確保高精度,并將振動、噪聲和電磁輻射 (EMR) 降到最低。此外,還必須避免使用笨重的散熱器和外部線束,以節省重量、空間和成本。
設計人員常常面臨的挑戰是,在設計要求與時間和預算壓力之間做出平衡,同時避免出現代價高昂的開發錯誤。為了應對這種挑戰,設計人員可以利用氮化鎵 (GaN) 等快速、低損耗半導體技術,以提供驅動 BLDC 電機所需的功率級。
本文討論了基于 GaN 的功率級的相對優勢,并介紹了 [EPC]的一款以半橋拓撲結構實現的樣本器件。文中還說明了如何使用相關開發套件來快速啟動項目。在此過程中,設計人員將了解到如何利用 [Microchip Technology] 的 [motorBench 開發套件],以最小的編程工作量測量 BLDC 電機的參數,并在無傳感器磁場定向控制 (FOC) 模式下操作電機。
GaN 的優勢
為了高效控制電池應用中的 BLDC 電機,開發人員需要一種高能效、輕量化、外形尺寸較小的驅動級,可以放在盡可能靠近致動器的地方,例如放在電機外殼內。
絕緣柵雙極型晶體管 (IGBT) 穩固耐用,可以在最大 200 kHz 的頻率下切換高達 100 MW 的高功率,但不適合必須在高達 80 V 電壓下對電池充電進行管理的設備。高接觸電阻、續流二極管和開關損耗,以及關斷期間的電流拖尾,所有這些因素的組合會導致信號失真、發熱過多和雜散輻射。
與 IGBT 相比,金屬氧化物半導體場效應晶體管 (MOSFET) 開關速度更快,開關損耗和電阻損耗更低,但其柵極電容需要強大的柵極驅動器才能在高開關頻率下工作。能夠在高頻率下工作很重要,因為這意味著設計人員可以使用更小的電子元器件,從而減少整體空間需求。
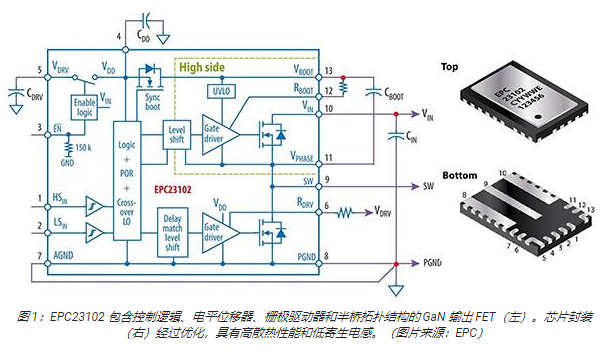
GaN 高電子遷移率晶體管 (HEMT) 具有高載流子遷移率,能夠以極快的速度和低損耗建立和擊穿半導體結。集成 GaN 驅動器(如 EPC 的 [EPC23102ENGRT])開關損耗極低,開關頻率則很高,支持實現緊湊的器件設計,適合極為狹小的空間。這款單片芯片包含一個帶有電平位移器的輸入邏輯接口、自舉加載電路和柵極驅動電路,以半橋拓撲結構控制 GaN 輸出 FET(圖 1)。芯片封裝經過優化,具有高散熱性能和低寄生電感。
") 圖 1:EPC23102 包含控制邏輯、電平位移器、柵極驅動器和半橋拓撲結構的 GaN 輸出 FET(左)。芯片封裝(右)經過優化,具有高散熱性能和低寄生電感。(圖片來源:EPC)
圖 1:EPC23102 包含控制邏輯、電平位移器、柵極驅動器和半橋拓撲結構的 GaN 輸出 FET(左)。芯片封裝(右)經過優化,具有高散熱性能和低寄生電感。(圖片來源:EPC)
更少的廢熱和更低的 EMR
EPC23102 輸出晶體管的典型漏源導通電阻 (R DS(on) ) 為 5.2 mΩ(25°C 時)。該晶體管可處理高達 100 V 的電壓和最大 35 A 的電流。此外,GaN 器件的橫向結構和無本征體二極管特性,使得柵極電荷 (Q G ) 和反向恢復電荷 (Q RR ) 特別低。
與具有類似 RDS(on) 的 MOSFET 器件相比,GaN 驅動器的開關損耗最多可降至前者的五分之一。因此,基于 GaN 的逆變器可以在相對較高的脈沖寬度調制 (PWM) 頻率(最高可達 3 MHz)和較短的空載時間(小于 50 ns)下運行。
GaN 半導體的開關速度 (dV/dt) 高、溫度系數低且采用更小寄生電感的封裝設計,最大程度減少了信號失真,進而最大程度減少了 EMR 和開關損耗。這樣就降低了對濾波策略的需求,而較小的低成本電容器和電感器則能節省電路板空間。
除了低接觸電阻 RDS(on) 外,GaN 器件還有其他優勢,例如 GaN 基底具有高導熱率、器件封裝具有很大的熱接觸面積,所有這些優勢使得 GaN 功率級能夠在沒有散熱器的情況下切換高達 15 A 的電流(圖 2)。
圖 2:GaN 功率級在 25.5°C 環境溫度和不同 PWM 頻率下的溫升與相電流的關系。(圖片來源:EPC)
EPC23102 還具有將電壓從低壓側轉換到高壓側通道的穩健電平轉換器,這些轉換器設計用于在軟切換和硬切換情況下工作,甚至可在高負端電壓下工作,并避免快速 dV/dt 瞬變(包括來自外部源或相鄰相位的瞬變)造成誤觸發。內部電路集成了邏輯和自舉電源充電及禁用功能。當供電電壓過低甚至失效時,保護功能可防止輸出 FET 意外導通。
即用型電機逆變器評估套件
要調試采用 GaN 技術的三相 BLDC 電機,最簡單、最快捷的方法是使用 EPC 的 [EPC9176KIT]電機逆變器評估套件。該套件由 EPC9176 電機逆變器板和 DSP 控制器板組成,還包括一個簡易的 EPC9147E 控制器插件適配器,用于通過客戶特定的主機控制器進行控制。耦合連接器傳輸以下信號:3 × PWM、2 × 編碼器、3 × U phase 、3 × I phase 、U DC 、IDC和 2 × 狀態 LED。
EPC9176 電機逆變器板是[參考設計],為公司內部電路設計提供了便利,而 EPC9147A 控制器板與 Microchip Technology 的 motorBench 開發環境一起使用時,用戶無需花時間編碼或編程就能快速啟動并運行應用。
該三相 BLDC 電機逆變器集成了三個 EPC23102 GaN 半橋驅動器,以控制交流或直流電機和 DC/DC 電源轉換器。最大 RDS(on) 為 6.6 mΩ,在高達 28 A 峰值 (A pk ) 或 20 A rms (A RMS ) 的負載電流和高達 100 V 的開關電壓下持續工作時,功率級造成的熱損耗非常小。配置為多相 DC/DC 轉換時,EPC23102 支持高達 500 kHz 的 PWM 開關頻率;對于電機驅動應用,開關頻率最高可達 250 kHz。
尺寸為 8.1 × 7.5 cm 的 EPC9176 電機逆變器板包含支持完整電機逆變器所需的所有關鍵功能電路,包括直流總線電容器、柵極驅動器、穩定輔助電壓、相電壓、相電流和溫度測量,以及針對每相的保護功能和可選的諧波或 EMR 濾波器(圖 3)。
") 圖 3:EPC9176 電機逆變器具有直流總線電容器、柵極驅動器、穩壓器、電壓檢測功能、電流和溫度保護功能以及 EMR 濾波器。(圖片來源:EPC)
圖 3:EPC9176 電機逆變器具有直流總線電容器、柵極驅動器、穩壓器、電壓檢測功能、電流和溫度保護功能以及 EMR 濾波器。(圖片來源:EPC)
該三相 GaN 逆變器在 14 至 65 VDC 的輸入電壓下工作,切換時不會過沖,因此轉矩平穩,運行噪聲極小。該板針對低于 10 V/ns 的 GaN 典型高速開關斜坡進行了優化,并且可以選擇降低此開關斜坡以操作 DC/DC 轉換器。此外,還可以連接兩個以不同電平工作的轉子位置傳感器(霍爾傳感器)。
無振動的轉矩和低運行噪聲
下面通過三相 BLDC 電機的一個實施實例展示空載時間參數化對電機平穩運行和由此產生的噪聲的影響。對于基于 GaN FET 的半橋,其高壓側和低壓側 FET 的開關轉換鎖定時間可以選擇為非常短,因為 GaN HEMT 的響應速度極快,不像較慢的 MOSFET 那樣會產生寄生過沖。
圖 4(左)顯示了一款 GaN 逆變器以 500 ns 的 MOSFET 典型空載時間和 40 kHz 的 PWM 頻率工作。本應是平穩的正弦相電流卻顯示出極高的失真,導致轉矩紋波和相應的噪聲非常高。在圖 4(右)中,空載時間降至 50 ns,所得到的正弦相電流使電機平穩運行,噪聲非常小。
") 圖 4:500 ns 的空載時間和 40 kHz 的 PWM 頻率(左)(MOSFET 的典型情況)造成相電流發生高失真,導致高轉矩紋波和高噪聲級。當空載時間為 50 ns 時(右),得到一個正弦相電流,使得電機以低噪聲平穩運轉。(圖片來源:EPC)
圖 4:500 ns 的空載時間和 40 kHz 的 PWM 頻率(左)(MOSFET 的典型情況)造成相電流發生高失真,導致高轉矩紋波和高噪聲級。當空載時間為 50 ns 時(右),得到一個正弦相電流,使得電機以低噪聲平穩運轉。(圖片來源:EPC)
更小的相電流紋波還意味著定子線圈的磁化損耗更低,而相電壓紋波越小,則分辨率越高,對轉矩和速度的控制就越精確,對于小型設計中使用的低電感電機更是如此。
對于需要更大功率的電機驅動應用,有兩款 GaN 逆變器板可供選擇:[EPC9167HCKIT](1 kW) 和 [EPC9167KIT](500 W)。兩者均使用 [EPC2065]GaN FET,其最大 RDS(on) 為 3.6 mΩ,最大器件電壓為 80 V。EPC9167 板在每個開關位置使用一個 FET,而 EPC9167HC 有兩個 FET 并行工作,提供最大 42 Apk (30 A RMS ) 的輸出電流。EPC2065 GaN FET 在電機控制應用中支持高達 250 kHz 的 PWM 開關頻率,在 DC/DC 轉換器中支持最高 500 kHz 的開關頻率。
[EPC9173KIT] 中的逆變器板可提供更高的功率 — 最高 1.5 kW。該板構成兩個單通道 [EPC23101ENGRT] GaN 柵極驅動器 IC(只有一個集成高壓側功率 FET)的半橋分支。該板可擴展為降壓、升壓、半橋、全橋或 LLC 轉換器。在有適當散熱措施的情況下,它可提供高達 50 Apk (35 A RMS ) 的輸出電流,能以高達 250 kHz 的 PWM 開關頻率工作。
幾分鐘內啟動并運行驅動級
不必編程就能評估 EPC9176 GaN 逆變器板的最快速方法是使用 [EPC9147A]控制器接口板。插件模塊 (PIM) [MA330031-2]包含 Microchip Technology 的 16 位 DSP [dsPIC33EP256MC506-I-PT](圖 5)。
") 圖 5:EPC9147A 通用控制器接口卡支持各種插件模塊,如基于 16 位 dsPIC33EP256 DSP 的 MA330031-2 PIM。(圖片來源:EPC/Microchip Technology)
圖 5:EPC9147A 通用控制器接口卡支持各種插件模塊,如基于 16 位 dsPIC33EP256 DSP 的 MA330031-2 PIM。(圖片來源:EPC/Microchip Technology)
為了方便操作 DSP 控制器接口,設計人員可以使用 motorBench 開發套件,并且須為其添加:
本討論中的示例使用 [EPC9146]GaN 電機逆變器板,因此:
- 從針對 EPC914xKIT 的 MCLV-2 或 EPC 項目開始,其名稱為“sample-mb-33ep256mc506-mclv2.X”
用戶可以簡單選擇 EPC9146 GaN 電機逆變器板的樣本十六進制文件,并使用編程適配器(如 Microchip Technology 用于 16 位微控制器的 [PG164100])將其燒寫到 DSP dsPIC33EP256MC506。然后便可通過控件手動控制所連接的 BLDC 電機 (Teknic_M-3411P-LN-08D),并在無傳感器 FOC 模式下運行。
如果電機運行不理想或需要配置成其他工作狀態,motorBench 還提供了一個可配置的樣本文件,燒寫該文件之前須進行編譯。如上所述,GaN 電機驅動器的一個基本但重要的參數是空載時間,須為 50ns 或更小,在編譯 hex 文件之前務必檢查此參數。
BLDC 電機的自定義參數
要利用 motorBench IDE 定制 BLDC 電機配置以實現無傳感器 FOC 工作,用戶可以測量其電機的參數,并在配置文件中輸入相關的值。例如,[ISL Products International]的 [MOT-I-81542-A]電機可以作為這里的測試電機。該電機在 24 V 電壓下以 6100 rpm 的轉速運行時,功耗約為 361 W。
首先必須確定以下四個電機參數:
- 歐姆電阻:用萬用表在定子線圈端子之間測量
- 電感:用萬用表在定子線圈端子之間測量
- 極對:要確定極對,設計人員必須將兩相短路,讓第三相開路,然后手動計算軸轉一圈的閂鎖數量,再將結果除以 2
- 反電動勢 (BEMF):用示波器在定子線圈端子之間測量。為此,設計人員必須:
- 將探頭夾在兩條相線上,第三條相線斷開
- 用手轉動電機軸,并記錄電壓響應
- 測量最大正弦半波的峰間電壓 A
pp和周期 Thalf(圖 6)。
") 圖 6:通過測量最大正弦半波的峰間電壓 A
圖 6:通過測量最大正弦半波的峰間電壓 App 和周期 Thalf 來確定 BEMF。(圖片來源:EPC)
參考上述項目示例,Microchip 為 Teknic M-3411P-LN-08D 電機(8.4 A RMS 、八極、轉矩 = 1 Nm、額定功率為 244 W)確定了以下參數:
- A
pp= 15.836 Vpp - T
half= 13.92 ms - 極對:pp = 4
- 然后,Microchip 利用公式 1 計算 BEMF 常數 (1000 rpm = 1 k
rpm):
") 公式 1
公式 1
 對于此示例電機
對于此示例電機
(motorBench 使用 10.2 的值)
- R
L-L= 800 mΩ 線對線電阻,減去 LCR 儀表引線的 100 mΩ - 本例中使用 L
d= Lq= 1 mH,盡管測量結果為 932 μH
將確定的參數輸入到 motorBench 的子菜單 Configure/PMSM Motor(配置/PMSM 電機)。為此,設計人員可以簡單地使用類似電機類型的 XML 配置文件,或者將參數輸入到新建的(空)配置文件,然后通過“Import Motor”(導入電機)按鈕導入。
總結
GaN 電機驅動器 IC 具有高能效特點,適用于小尺寸、輕量化電池供電的 BLDC 電機驅動器。這些 IC 集成于電機外殼中,得到良好的保護,簡化了器件設計和安裝,并減少了維護工作。
在參考電路、基于模型的預編程 DSP 控制器和電機開發環境的支持下,BLDC 電機應用的設計和編程人員可以縮短電路設計時間,更加專注于應用開發。
-
電機控制
+關注
關注
3534文章
1876瀏覽量
268740 -
BLDC
+關注
關注
206文章
800瀏覽量
96868 -
GaN
+關注
關注
19文章
1933瀏覽量
73286 -
無刷直流電機
+關注
關注
61文章
689瀏覽量
46120 -
FOC
+關注
關注
20文章
322瀏覽量
42798
發布評論請先 登錄
相關推薦
驅動電機功率級的性能如何提高電動工具設計
如何集成 GaN 功率級以實現高效的電池供電 BLDC 電機推進系統
用于具有逐周期堵轉電流限制器的BLDC電機的36V32A功率級
可實現低噪聲運行的BLDC電機驅動器包括BOM及層圖
提高IPM系統級功率密度以應對新壓力
具有逐周期堵轉電流限制器的BLDC電機的36V、32A功率級參考設計
具有高效、高功率因數電源的TIDA-00652參考設計
國內首發納芯微車用小電機驅動SoC——NSUC1610
Trinamic全新三相BLDC電池供電電機驅動器問市
GaN智能功率模塊(IPM)實現高效電機驅動





 工商網監
工商網監
評論