 如何使用無傳感器歸位來創建硬停止和改變方向
如何使用無傳感器歸位來創建硬停止和改變方向
如何使用無傳感器歸位來創建硬停止和改變方向
AlphaStep AR 系列步進電機具有傳統步進電機通常不提供的擴展功能。使用 AR 上的 TLC 輸出,我們可以感知預設的扭矩設置范圍或執行扭矩控制功能。
該范圍基于使用 MEXE02 軟件或 OPX-2A 數據設置器設置的電機電流。在應用過程中,用戶可以打開 T 模式輸入,這將激活扭矩控制模式或推動運動。用戶可以操縱 M0、M1 和 M2 輸入以對應所需的電機電流設置或扭矩設置。
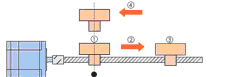
對于無傳感器歸位例程,我們建議將電流設置為低設置,并以慢速向硬停止移動。一旦電機達到當前設置限值,TCL 輸出將激活以在達到硬停止時進行通信。然后控制器可以反轉操作方向,記下位置,然后照常進行。
AR 系列步進電機還具有內置的電氣復位程序。當返回輸入被激活(Push-Motion 關閉)時,驅動器將自動使電機返回到 0 計數位置。這個位置實際上是第一次給驅動器通電時電機的位置。
例子
在絲杠應用中,使用 SCX10 系列控制器。
通過從 SCX10 控制器的通用輸出 1 連接到 T 模式輸入,以及從 SCX10 的通用輸出 2 到 AR 驅動器上的 M1 輸入的另一個連接,我們現在可以控制電流控制模式。來自 SCX10 的通用輸入 1 需要連接到 AR 驅動器的 TLC 輸出。SCX10 的無傳感器歸位代碼類似于以下內容:
[1] OUT1 = 1(打開 T 模式)
[2] OUT2 = 1(將電流變為指定值)
[3] VS = 100(將起始速度設置為 100 Hz)
[4] VR = 500 (將運行速度設置為 500 Hz)
[5] MCN(沿 CCW 方向連續運行電機)
[6] WHILE (IN1 != 1)(連續運行直到設置輸入 1)
[7] WEND
[8] MSTOP (停止電機)
[9] PC = 0(重置位置計數器)
[10] END(無傳感器歸位完成)
這可以很容易地由 PLC 或其他控制設備控制。
審核編輯:湯梓紅
-
控制器
+關注
關注
112文章
16381瀏覽量
178297 -
步進電機
+關注
關注
150文章
3112瀏覽量
147543 -
無傳感器
+關注
關注
0文章
42瀏覽量
13499
發布評論請先 登錄
相關推薦
何謂地磁傳感器?


無源傳感器什么是無源呢?原理是什么呢?
無源型傳感器的分類、工作原理及應用
無源傳感器又稱為什么型傳感器
無源傳感器的基本概念、工作原理及分類
方向角度傳感器零點位置怎么判斷
步進電機a+a-b+b-如何改變方向
網絡研討會:利用無電池傳感器打造物聯網的未來!







 工商網監
工商網監
評論