") AGV類型及導(dǎo)航形式為您提供詳盡解讀
AGV類型及導(dǎo)航形式為您提供詳盡解讀

AGV是什么?
AGV 是(Automated Guided Vehicle)的縮寫,為自動(dòng)導(dǎo)引運(yùn)輸車,是指裝備有電磁或光學(xué)等自動(dòng)導(dǎo)引裝置,能夠沿規(guī)定的導(dǎo)引路徑行駛,具有安全保護(hù)以及各種移載功能的運(yùn)輸車。它是一種輪式機(jī)器人。
AMR 是什么?
AMR是(Autonomous Mobile Robot)的縮寫,也是自主移動(dòng)機(jī)器人,不同于AGV的是,AMR可以通過自身的傳感器等元器件感知周圍環(huán)境并做出相應(yīng)決策,譬如自動(dòng)避障,安全繞行,選取最佳路徑。同樣也屬于輪式機(jī)器人。通常其多采用激光導(dǎo)航或視覺及混合導(dǎo)航形式。
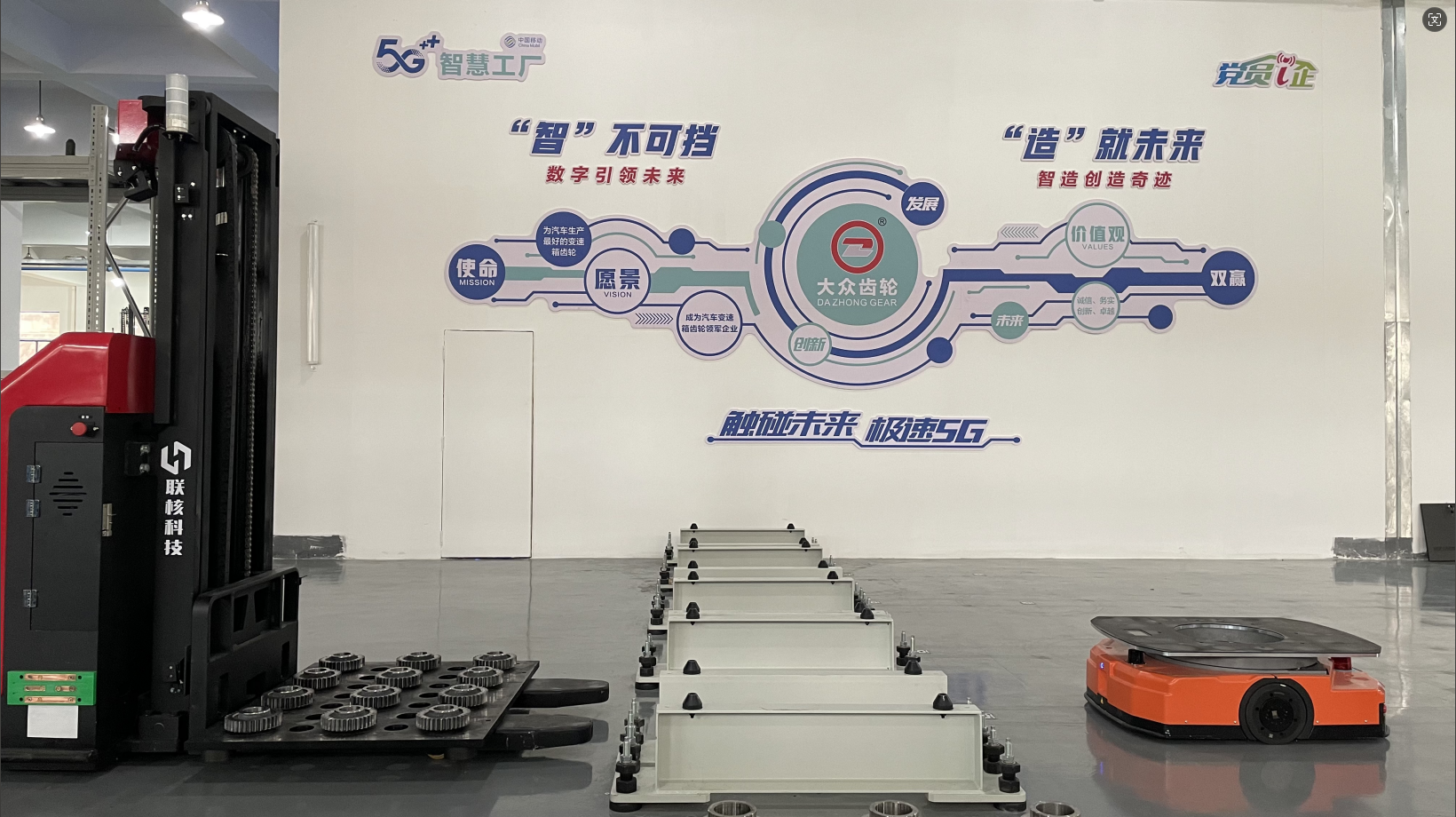
AGV應(yīng)用場(chǎng)景圖
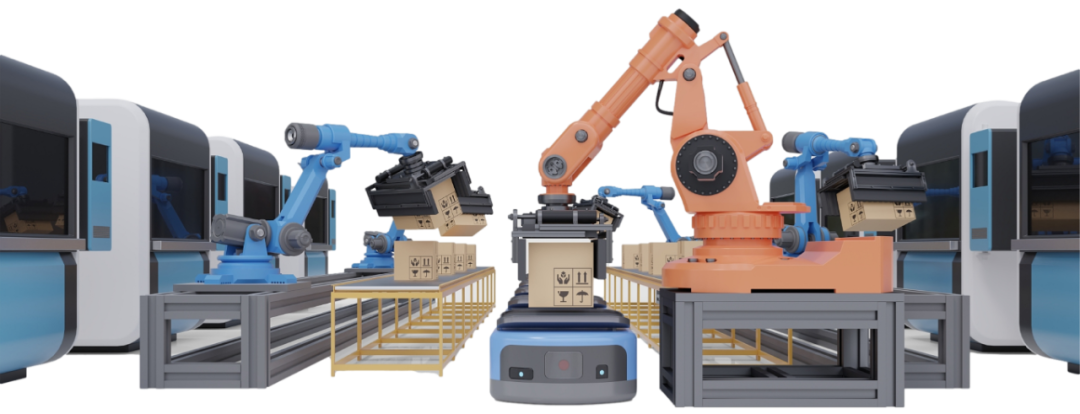

搬運(yùn)型AGV是將傳統(tǒng)各類搬運(yùn)裝卸工具實(shí)現(xiàn)電驅(qū)動(dòng)化和自動(dòng)化,實(shí)現(xiàn)無人/智能搬運(yùn)裝卸,主要用來自動(dòng)化搬運(yùn)裝卸各類物料。
搬運(yùn)型AGV主要由AGV車體、移載裝置及控制裝置等部分組成。
搬運(yùn)型AGV的車型形式很多,通常有潛伏牽引式(單向、雙向、全向)、尾部牽引式、背負(fù)承載式(平板式、剪刀叉舉升式、托盤舉升式、整體舉升式)、輸送承載式(單層輸送式、單層舉升輸送式、單層多維輸送式、多層輸送式)、叉舉承載式(叉車式、叉舉式、卷料叉舉式、叉車)等。
裝配型AGV與搬運(yùn)型AGV區(qū)別在哪?
裝配型AGV與搬運(yùn)型AGV區(qū)別在于功能的復(fù)雜化,能處理裝貨、卸載等復(fù)雜的動(dòng)作,再進(jìn)行物品搬運(yùn)。典型的裝配型AGV有機(jī)械手AGV、滾筒AGV、叉車式AGV、升降平臺(tái)式AGV等。這些AGV類型都對(duì)基礎(chǔ)車體進(jìn)行了改良,增加一些功能,從而實(shí)現(xiàn)一系列復(fù)雜動(dòng)作。
裝配型AGV的優(yōu)勢(shì):
裝配型AGV的自動(dòng)化程度比搬運(yùn)型更高,可完全解放勞動(dòng)力,實(shí)現(xiàn)搬運(yùn)、裝卸功能一體化。站點(diǎn)之間AGV進(jìn)行搬運(yùn),每到一個(gè)站點(diǎn)停靠都可進(jìn)行貨物的裝貨和卸載。可與生產(chǎn)流水線、錕道等生產(chǎn)系統(tǒng)對(duì)接,把錕道、生產(chǎn)線上完成的物品裝配到AGV上再進(jìn)行轉(zhuǎn)移運(yùn)送。裝配型AGV一般屬于重載式AGV,因此車體設(shè)計(jì)通常比較大,適用于汽車等大型產(chǎn)品的移載運(yùn)送。
磁條導(dǎo)航是一項(xiàng)非常成熟的技術(shù),主要通過測(cè)量路徑上的磁場(chǎng)信號(hào)來獲取車輛自身相對(duì)于目標(biāo)跟蹤路徑之間的位置偏差,從而實(shí)現(xiàn)車輛的控制及導(dǎo)航。磁條導(dǎo)航具有很高的測(cè)量精度及良好的重復(fù)性,磁導(dǎo)航不易受光線變化等的影響,在運(yùn)行過程中,磁傳感系統(tǒng)具有很高的可靠性和魯棒性。磁條一旦鋪設(shè)好后,維護(hù)費(fèi)用非常低,使用壽命長(zhǎng),且增設(shè)、變更路徑較容易。磁條需要預(yù)先部署規(guī)劃路徑且易被破損,易吸引金屬物質(zhì)導(dǎo)致AGV設(shè)備故障。
在線路上離散鋪設(shè)QR二維碼,通過AGV車載攝像頭掃描解析二維碼獲取實(shí)時(shí)坐標(biāo)。二維碼導(dǎo)引方式也是目前市面上最常見的AGV導(dǎo)引方式,二維碼導(dǎo)引+慣性導(dǎo)航的復(fù)合導(dǎo)航形式也被廣泛應(yīng)用,亞馬遜的KIVA機(jī)器人就是通過這種導(dǎo)航方式實(shí)現(xiàn)自主移動(dòng)的。這種方式相對(duì)靈活,鋪設(shè)和改變路徑也比較方便,缺點(diǎn)是二維碼易磨損,需定期維護(hù)。
慣性導(dǎo)航是在AGV上安裝陀螺儀,利用陀螺儀可以獲取AGV的三軸角速度和加速度,通過積分運(yùn)算對(duì)AGV進(jìn)行導(dǎo)航定位,慣性導(dǎo)航優(yōu)點(diǎn)是成本低,短時(shí)間內(nèi)精度高,但這種導(dǎo)航方式缺點(diǎn)也特別明顯,陀螺儀本身隨著時(shí)間增長(zhǎng),誤差會(huì)累積增大,直到丟失位置,堪稱是“絕對(duì)硬傷”。使得慣性導(dǎo)航通常作為其他導(dǎo)航方式的輔助。
磁釘導(dǎo)航是通過磁導(dǎo)航傳感器檢測(cè)磁釘?shù)拇判盘?hào)來尋找行進(jìn)路徑,只是將原來采用磁條導(dǎo)航時(shí)對(duì)磁條進(jìn)行連續(xù)感應(yīng)變成間歇性感應(yīng),因此磁釘之間的距離不能夠過大,且兩磁釘間AGV處于一種距離計(jì)量的狀態(tài),在該狀態(tài)下需要編碼器計(jì)量所行走的距離。其次,磁釘導(dǎo)航所用控制模塊與磁條導(dǎo)航控制模塊相同。對(duì)環(huán)境要求低,一般配合慣導(dǎo)控制,但施工成本高,挖孔預(yù)埋,靈活性差,后期變更成本高。
通過在AGV行駛路徑的周圍安裝激光反射板,AGV通過發(fā)射激光束,同時(shí)采集由反射板反射的激光束,來確定其當(dāng)前的位置和方向,并通過連續(xù)的三角幾何運(yùn)算來實(shí)現(xiàn)AGV的導(dǎo)航。
目前激光導(dǎo)航技術(shù)已經(jīng)成為國(guó)內(nèi)外AGV廠商的主流方案,由于其定位精度高、線路變更靈活、導(dǎo)航技術(shù)成熟等等因素導(dǎo)致激光導(dǎo)航已經(jīng)普及。激光導(dǎo)航需要提前按照一定要求鋪設(shè)反射板,成本較高,適用于周邊無遮擋的作業(yè)環(huán)境。
電磁導(dǎo)航是較為傳統(tǒng)的導(dǎo)航方式之一,目前仍被采用,它是在AGV的行駛路徑上埋設(shè)金屬線,并在金屬線加載導(dǎo)引頻率,通過對(duì)導(dǎo)引頻率的識(shí)別來實(shí)現(xiàn)AGV的導(dǎo)航功能。該導(dǎo)航技術(shù)類似于磁條導(dǎo)航,由于該導(dǎo)航技術(shù)美性不足、路徑變更困難等缺點(diǎn),該技術(shù)方案逐漸被AGV廠商放棄,但是特定地場(chǎng)合也比較適合該導(dǎo)航技術(shù),具體根據(jù)AGV工作環(huán)境要求。比如高溫環(huán)境下、線路平直性要求嚴(yán)格等要求。
輪廓導(dǎo)航是目前AGV最為先進(jìn)的導(dǎo)航技術(shù),該技術(shù)利用二維激光掃描儀對(duì)現(xiàn)場(chǎng)環(huán)境進(jìn)行測(cè)量、學(xué)習(xí),并繪制導(dǎo)航環(huán)境,然后進(jìn)行多少測(cè)量學(xué)習(xí),修正地圖進(jìn)而實(shí)現(xiàn)輪廓導(dǎo)航功能。利用自然環(huán)境(墻壁、柱子以及其它固定物體)進(jìn)行自由測(cè)距導(dǎo)航根據(jù)環(huán)境測(cè)量結(jié)果更新位置。輪廓導(dǎo)航算法更復(fù)雜,成本較高,調(diào)度方面較為復(fù)雜,增加系統(tǒng)冗余。
視覺導(dǎo)航也是基于SLAM算法的一種導(dǎo)航方式,這種導(dǎo)航方式是通過車載視覺攝像頭采集運(yùn)行區(qū)域的圖像信息,通過圖像信息的處理來進(jìn)行定位和導(dǎo)航。視覺導(dǎo)航具有高靈活性,適用范圍廣和成本低等優(yōu)點(diǎn),但是目前技術(shù)還不夠成熟,識(shí)別地面紋理信息較長(zhǎng)。利用視覺系統(tǒng)快速準(zhǔn)確地實(shí)現(xiàn)路標(biāo)識(shí)別這一技術(shù)仍處于瓶頸階段。
色帶導(dǎo)航通過視覺傳感器(或組合式的色標(biāo)傳感器),檢測(cè)事先鋪設(shè)在地面的色帶與AGV的相對(duì)位置,從而使小車沿既定路線(色帶)行駛。
熒光導(dǎo)航的路線是以熒光顏料制作的色帶。熒光導(dǎo)航傳感器發(fā)射經(jīng)調(diào)制的紫外光,熒光色帶上的熒光物質(zhì)會(huì)被紫外光激發(fā),發(fā)射出波長(zhǎng)在可見光光譜范圍內(nèi)(約420 nm 到750 nm)的可見光。熒光導(dǎo)航傳感器會(huì)接收此光線,從而測(cè)量判斷色帶與AGV的相對(duì)位置,從而使小車沿既定路線行駛。
鋪設(shè)容易改路徑,成本低,易被污染,環(huán)境要求高,地面平整性要求高。
測(cè)距導(dǎo)航是利用激光二位掃描儀對(duì)其周圍環(huán)境進(jìn)行掃描測(cè)量,獲取測(cè)量數(shù)據(jù)然后結(jié)合導(dǎo)航算法實(shí)現(xiàn)AGV導(dǎo)航。該導(dǎo)航傳感通常使用具有安全功能的安全激光掃描儀實(shí)現(xiàn),由于采用安全激光掃描儀可以實(shí)現(xiàn)安全功能的同時(shí)也能夠?qū)崿F(xiàn)導(dǎo)航測(cè)量功能。采用測(cè)距導(dǎo)航技術(shù)的AGV可以實(shí)現(xiàn)進(jìn)入集裝箱內(nèi)部進(jìn)行自動(dòng)取貨送貨功能。
自然導(dǎo)航也稱為SLAM激光導(dǎo)航,是一種無需使用反射板的自然導(dǎo)航方式,它不再需要通過輔助導(dǎo)航標(biāo)志(二維碼、反射板等),而是通過工作場(chǎng)景中的自然環(huán)境,如:倉(cāng)庫(kù)中的柱子、墻面、貨架等作為定位參照物以實(shí)現(xiàn)定位導(dǎo)航。相比于傳統(tǒng)的激光導(dǎo)航,它的優(yōu)勢(shì)是制造成本較低。
混合導(dǎo)航是多種導(dǎo)航的集合體,該導(dǎo)航方式是根據(jù)現(xiàn)場(chǎng)環(huán)境的變化應(yīng)運(yùn)而生的。由于現(xiàn)場(chǎng)環(huán)境的變化導(dǎo)致某種導(dǎo)航暫時(shí)無法滿足要求,進(jìn)而切換到另一種導(dǎo)航方式繼續(xù)滿足AGV連續(xù)運(yùn)行。

蘇州鳳凰動(dòng)力工業(yè)有限公司(簡(jiǎn)稱:鳳凰動(dòng)力)是國(guó)內(nèi)較早從事專業(yè)AGV/AMR舵輪、電驅(qū)動(dòng)輪總成研發(fā)與生產(chǎn)的企業(yè),主要產(chǎn)品包括臥式驅(qū)動(dòng)輪、臥式舵輪、立式驅(qū)動(dòng)輪、立式舵輪、重載AGV曲軸腳輪、高精密型腳輪萬向輪。電驅(qū)動(dòng)輪及舵輪功率范圍0.2KW~50KW、輪徑范圍150mm~600mm、單只載重范圍300KG~20000KG,幾乎涵蓋了工業(yè)領(lǐng)域各類電驅(qū)動(dòng)移動(dòng)設(shè)備的需求,客戶選型游刃有余,并且還可以滿足客戶個(gè)性化的定制需求,為客戶打造專屬化產(chǎn)品。
自創(chuàng)立以來,鳳凰動(dòng)力已經(jīng)為超過1800家客戶提供了完整的電驅(qū)動(dòng)解決方案,涉及軍工、航運(yùn)碼頭、機(jī)場(chǎng)、建筑、鋼鐵、汽車、工業(yè)車輛、紡織、機(jī)械制造、電子制造等多個(gè)行業(yè)。取得各種專利40多項(xiàng),建立起電機(jī)、齒輪、驅(qū)動(dòng)控制系統(tǒng)等核心零部件優(yōu)秀的供應(yīng)鏈基礎(chǔ),完成了標(biāo)準(zhǔn)化、模塊化、定制化、集成化、系統(tǒng)化、智能化初步架構(gòu),為提供優(yōu)質(zhì)的OEM、ODM整體解決方案打下了堅(jiān)實(shí)的基礎(chǔ)。
審核編輯黃宇
-
激光
+關(guān)注
關(guān)注
19文章
3208瀏覽量
64534 -
AGV
+關(guān)注
關(guān)注
27文章
1312瀏覽量
41121
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
AGV小車的工作原理是什么?
AGV激光導(dǎo)航定位技術(shù)綜述與發(fā)展趨勢(shì)

TomTom為依維柯商用車提供增強(qiáng)的導(dǎo)航
如何選擇讓自己滿意(適合)的agv小車?純干貨分享
AGV激光導(dǎo)航定位技術(shù)與構(gòu)建地圖

智能呼叫、激光導(dǎo)航、自動(dòng)避障,為什么AGV機(jī)器人被需要?

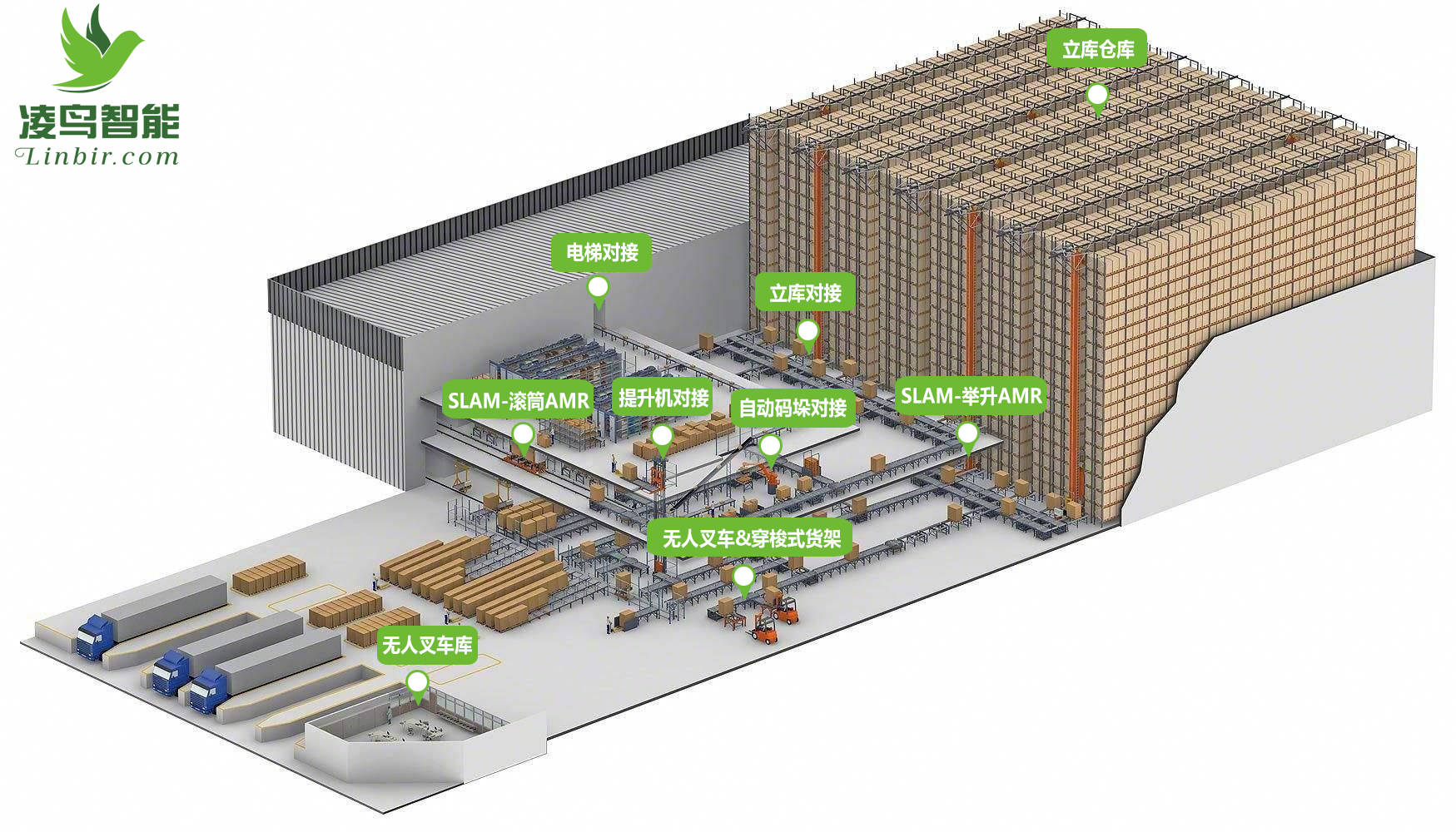
解讀 AGV 關(guān)鍵連接對(duì)物流自動(dòng)化發(fā)展的意義

Agv無人叉車常見的5種導(dǎo)航方式大盤點(diǎn)!優(yōu)缺點(diǎn)分析 哪種更適合你?
神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)類型和應(yīng)用實(shí)例
Agv叉車由什么構(gòu)成?工作原理是什么?易損件有哪些?

鳳凰動(dòng)力為AGV電驅(qū)動(dòng)輪行業(yè)提供專業(yè)解決方案 您負(fù)責(zé)做決定,我負(fù)責(zé)讓您滿意,歡迎咨詢 # AGV舵輪
AGV小車上的慣性導(dǎo)航模塊運(yùn)用——SGPM02

激光,磁性,視覺?什么是AGV最好的導(dǎo)航系統(tǒng)?
更智能更柔性化,AGV導(dǎo)航方式的創(chuàng)新與演進(jìn)!






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論