") 運動控制器PSO視覺飛拍與精準(zhǔn)輸出的C++開發(fā)(三):二維/三維/多軸PSO輸出
運動控制器PSO視覺飛拍與精準(zhǔn)輸出的C++開發(fā)(三):二維/三維/多軸PSO輸出
本文主要介紹正運動技術(shù)EtherCAT控制器在VS平臺采用C++語言實現(xiàn)的各種PSO功能。正運動提供多種PSO模式供用戶搭配不同的場景使用。
上節(jié)講解了多軸PSO等距周期和固定時間周期兩種比較輸出模式,本節(jié)主要講解二維三維比較輸出模式。
01 硬件介紹
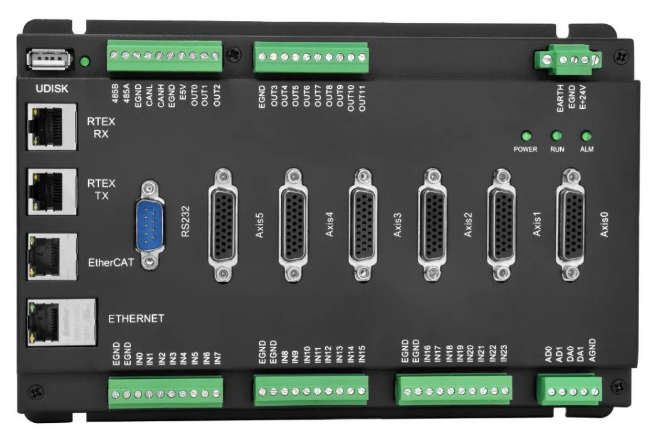
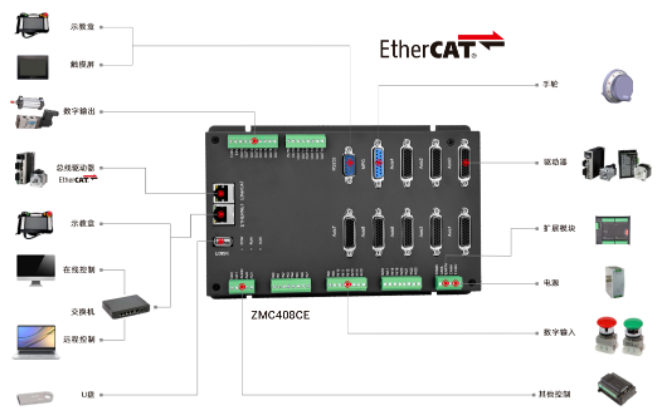
ZMC408CE是正運動推出的一款多軸高性能EtherCAT總線運動控制器,具有EtherCAT、EtherNET、RS232、CAN和U盤等通訊接口,ZMC系列運動控制器可應(yīng)用于各種需要脫機(jī)或聯(lián)機(jī)運行的場合。
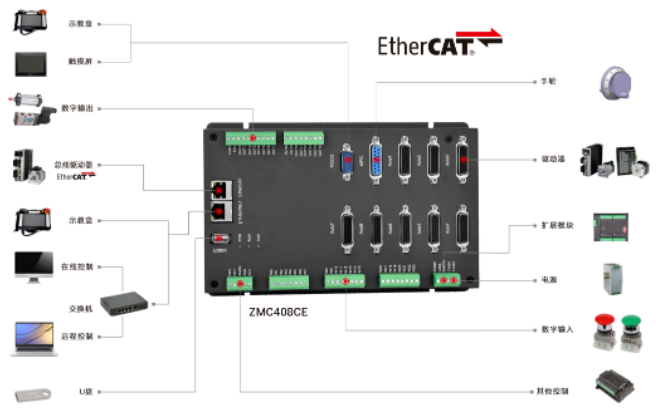
ZMC408CE支持8軸運動控制,最多可擴(kuò)展至32軸,支持直線插補(bǔ)、任意圓弧插補(bǔ)、空間圓弧、螺旋插補(bǔ)、電子凸輪、電子齒輪、同步跟隨等功能。
ZMC408CE支持8軸運動控制,可采用脈沖軸(帶編碼器反饋)或EtherCAT總線軸,通用IO包含24個輸入口和16個輸出口,部分IO為高速IO,EtherCAT最快100us的刷新周期。
ZMC408CE支持8個通道的硬件比較輸出、硬件定時器、運動中精準(zhǔn)輸出,還支持8通道PWM輸出,對應(yīng)的輸出口為OUT0-7,支持8個通道同時觸發(fā)硬件比較輸出,用于多通道的視覺飛拍場合等。
ZMC408CE支持PLC、Basic、HMI組態(tài)三種編程方式。PC上位機(jī)API編程支持C#、C++、LabVIEW、Matlab、Qt、Linux、VB.Net、Python等接口。
ZMC408CE內(nèi)置高精度PSO位置同步輸出功能,在加工圓角與曲線時即使進(jìn)行有減速調(diào)整,在高速加工的場合中也能控制激光輸出的等間距輸出。
02 PSO技術(shù)介紹
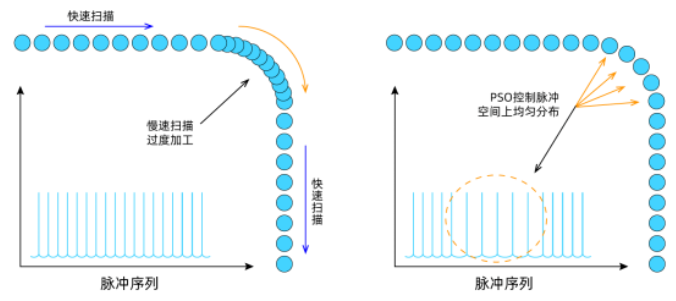
PSO(position synchronized output)即位置同步輸出,本質(zhì)是通過采集實時的編碼器反饋位置(無編碼器可使用輸出的脈沖位置)與比較模式設(shè)定的位置進(jìn)行比較,控制OP高速同步輸出信號,PSO示意圖如下。

PSO一般與激光器(或點膠噴射閥等設(shè)備)同步輸出信號進(jìn)行相位同步,在運動軌跡的所有階段以恒定的空間(或恒定時間)間隔觸發(fā)輸出開關(guān),包括加速、減速和勻速段,從而實現(xiàn)脈沖能量均勻地作用在被加工物體上。
PSO功能的特點是能高速且穩(wěn)定的輸出信號,因為輸出精度足夠高,所以能夠在整個運動軌跡中以固定的距離觸發(fā)輸出信號而不用考慮總體速度,即在直線部分以很快的速度運動,而在圓角部分減速的同時也能保證輸出間距恒定。
通常圓角加工部分在整個加工過程中占有比較小的部分,這樣在保證加工效果的同時,就可以最大限度地提高產(chǎn)能。
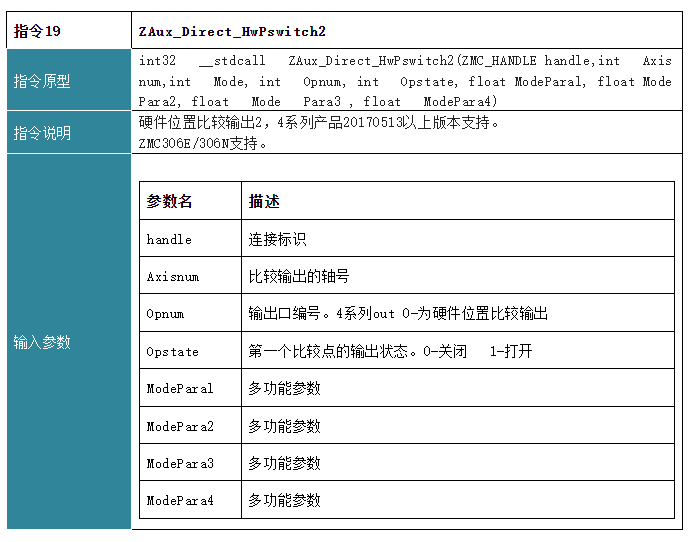
正運動的PSO功能調(diào)用ZAux_Direct_HwPswitch2函數(shù)接口實現(xiàn),該函數(shù)采用硬件實現(xiàn)IO的高速比較輸出,響應(yīng)速度達(dá)到微秒級別,故名硬件比較輸出。
03 C++語言MFC進(jìn)行運動控制項目的開發(fā)
1.新建MFC項目并添加函數(shù)庫
注:本例程在VS2010編譯環(huán)境下,基于.NET Framework 4.0框架創(chuàng)建的MFC窗體應(yīng)用程序。
(1)工具欄菜單“文件”→“新建”→“項目”,啟動創(chuàng)建項目向?qū)А?/p>
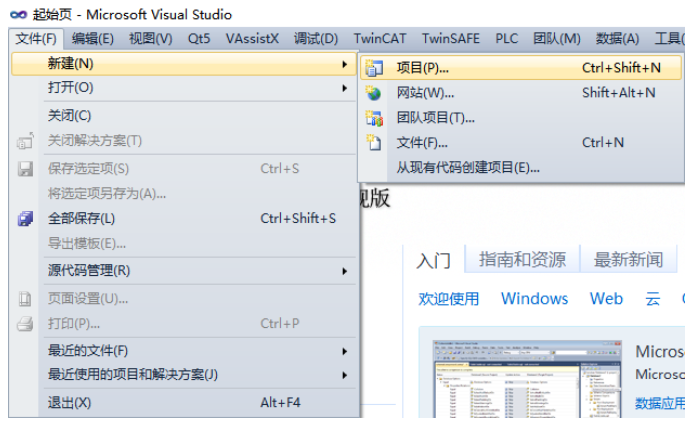
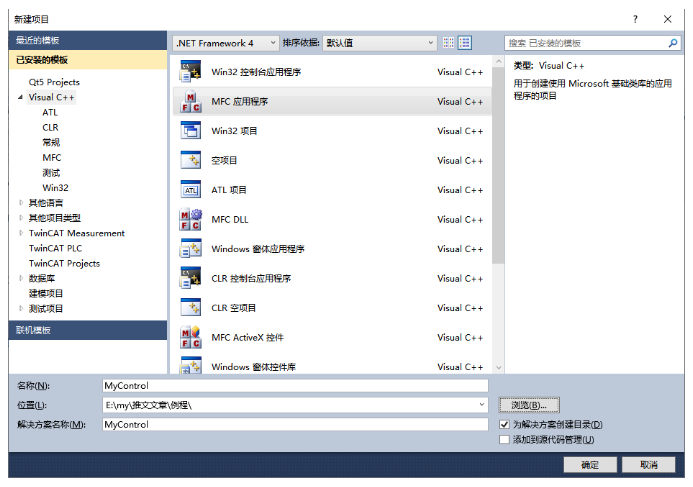
(2)選擇開發(fā)語言為“Visual C++”和.NET Framework 4以及MFC應(yīng)用程序,填寫好程序名以及選擇好程序存放路徑,點擊確定。
(3)點擊下一步。
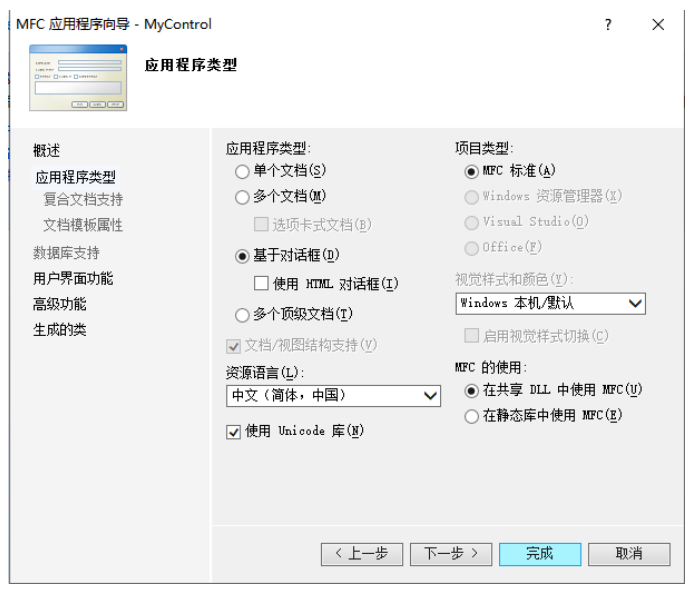
(4)選擇類型為“基于對話框”,點擊下一步或者完成即可。
2.找到廠家提供的C++函數(shù)庫文件
(1)進(jìn)入廠商提供的光盤資料,找到“8.PC函數(shù)”文件夾,并點擊進(jìn)入,找到C++函數(shù)庫,路徑如下(64位庫為例)。

(2)選擇“函數(shù)庫2.1”文件夾。

(3)選擇“Windows平臺”文件夾。
(4)根據(jù)需要選擇對應(yīng)的函數(shù)庫,這里選擇“64位庫”。
(5)解壓C++壓縮包,里面有C++對應(yīng)的函數(shù)庫。
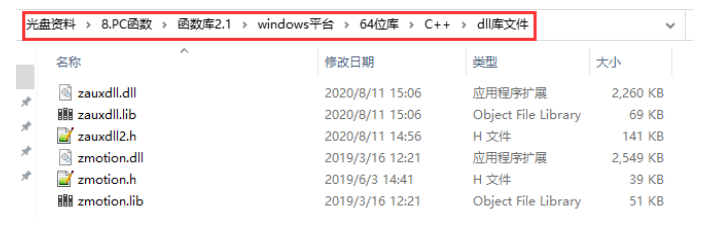
(6)函數(shù)庫具體路徑如下。
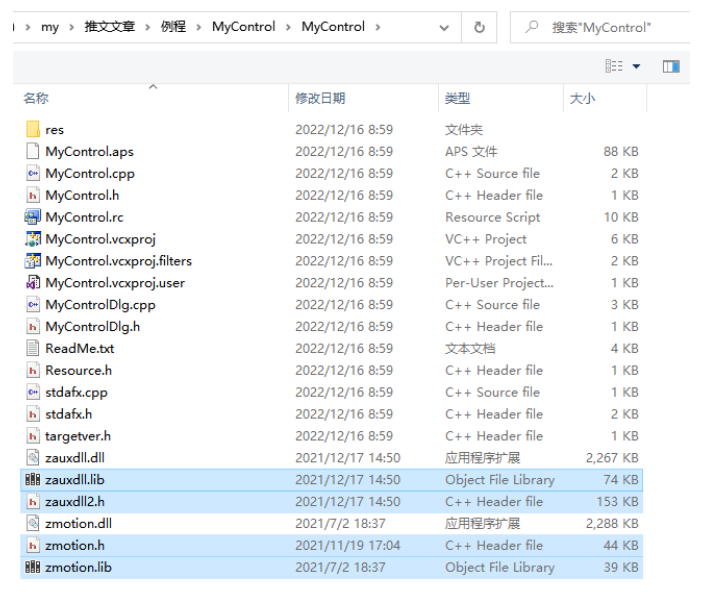
(7)將廠商提供的C++庫文件以及相關(guān)文件復(fù)制到新建的項目中。
3.在項目中添加靜態(tài)庫和相關(guān)頭文件
靜態(tài)庫:zauxdll.lib, zmotion.lib相關(guān)頭文件:zauxdll2.h, zmotion.h
(1)先右擊頭文件,接著依次選擇:“添加”→“現(xiàn)有項”。
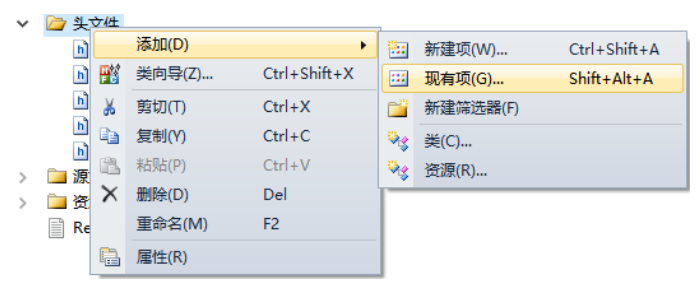
(2)在彈出的窗口中依次添加靜態(tài)庫和相關(guān)頭文件。
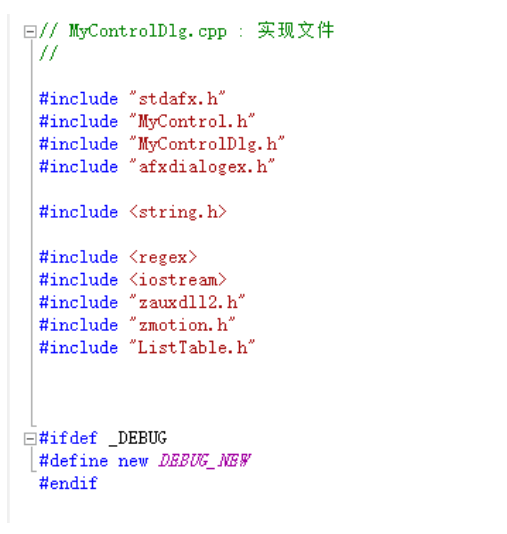
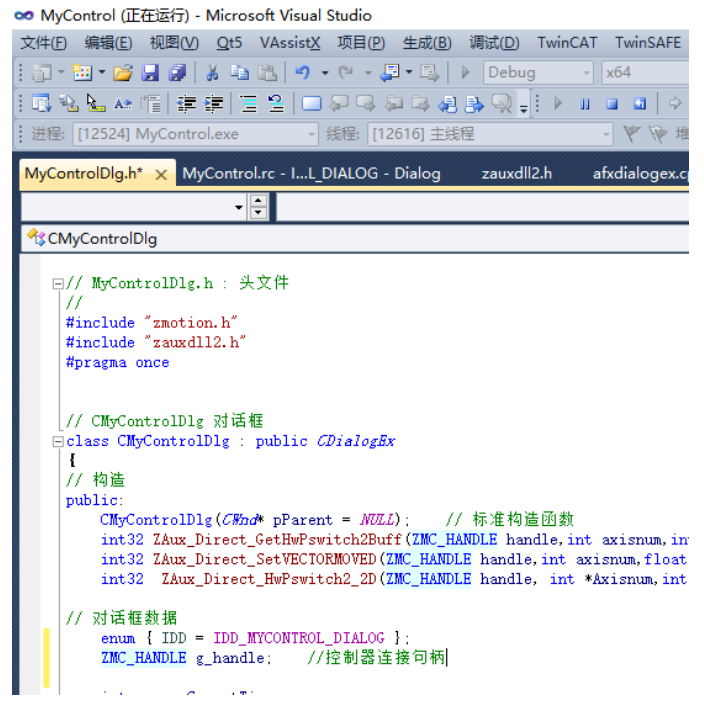
(3)聲明用到的頭文件和定義控制器連接句柄。
至此,項目新建完成。
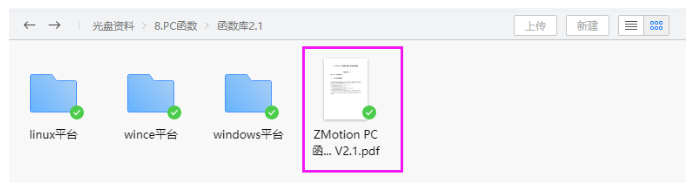
4.查看PC函數(shù)手冊
用戶需要從PC函數(shù)手冊中獲取運動控制開發(fā)使用的函數(shù)接口,對照手冊說明使用,PC函數(shù)手冊在光盤資料查看,具體路徑如下:“光盤資料8.PC函數(shù)函數(shù)庫2.1ZMotion函數(shù)庫編程手冊V2.1.pdf”。
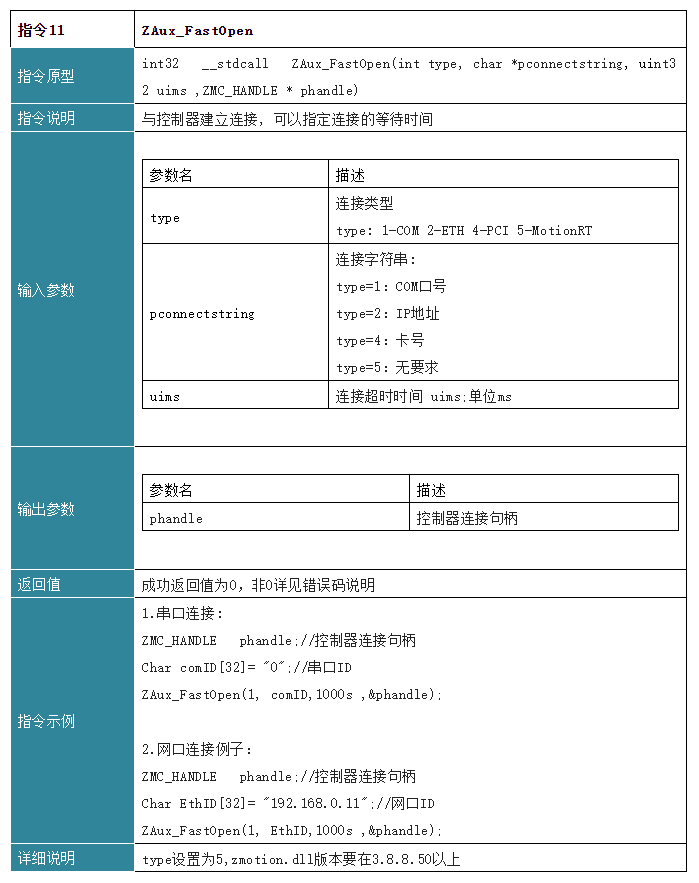
5.控制器網(wǎng)口連接函數(shù)接口
PC編程一般使用網(wǎng)口對控制器和工控機(jī)進(jìn)行鏈接。
ZAux_FastOpen();如果鏈接成功,該接口會返回一個鏈接句柄。通過操作這個鏈接句柄可以實現(xiàn)對控制器的控制。
ZAux_OpenEth()接口說明:
項目應(yīng)用截圖:
6.硬件比較輸出函數(shù)接口
使用對下位機(jī)寄存器操作的指令操作鏈接句柄“g_handle”,對控制器進(jìn)行寄存器內(nèi)容取值,實時控制下位機(jī)相關(guān)的指令如下。
實時全局變量指令:ZAux_Direct_HwPswitch2硬件比較輸出指令到位置后硬件自動觸發(fā)op輸出信號。
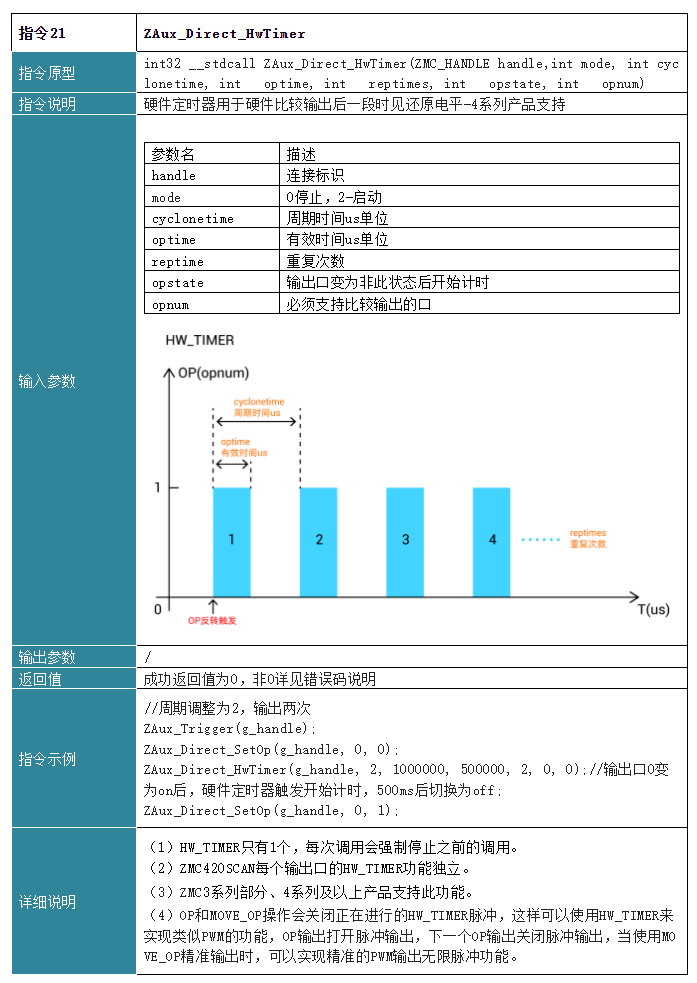
7.硬件定時器函數(shù)接口
ZAux_Direct_HwTimer硬件定時器硬件比較輸出后一段時間還原電平。
04 MFC程序的運行和讀寫控制開發(fā)
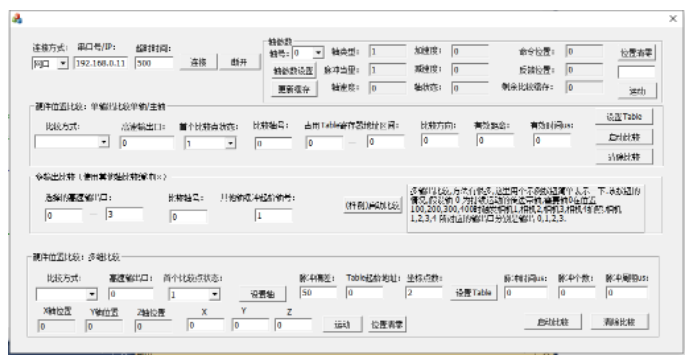
1.Demo交互界面如下
2.二維比較模式
(1)2D比較(模式25)
語法:HW_PSWITCH2(25,opnum,opstate,maxerr,num,tablepos)
mode 25:二維的比較模式;
opnum:對應(yīng)的輸出口;
opstate:第一個比較點的輸出狀態(tài);
maxerr:比較位置每個軸左右的脈沖偏差,進(jìn)入偏差范圍后開始比較,此參數(shù)不能寫0;
num:table里面存儲的比較點坐標(biāo)個數(shù);
tablepos:第一個比較點坐標(biāo)所在table編號。
說明:比較點寫在TABLE中,兩個連續(xù)的TABLE數(shù)據(jù)組成一個2D坐標(biāo),每到達(dá)一個比較位置OP反轉(zhuǎn)一次。圖中藍(lán)色段表示OP開啟,各類常用插補(bǔ)運動均支持比較,比較點坐標(biāo)一定的要準(zhǔn)確,否則會影響后面點的比較。
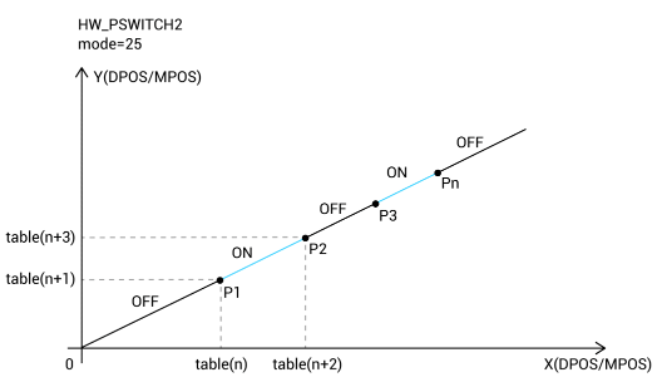
該模式主要功能為,碰到設(shè)置好的二維比較點之后,輸出口電平反轉(zhuǎn)。
該模式使用時需要指定高速輸出口,將首個比較點的輸出狀態(tài)、比較軸設(shè)置好之后,再設(shè)置比較點(即設(shè)置table寄存器,點數(shù)量等),設(shè)置比較點脈沖最大誤差等參數(shù)后,啟動比較。緊接著驅(qū)動軸運動即可。
脈沖偏差說明:2D模式下設(shè)置XY坐標(biāo)需要準(zhǔn)確,軸運動不到準(zhǔn)確的TABLE比較點時將無法觸發(fā),3D模式同理。故多維比較模式引入一個特殊參數(shù)maxerr位置范圍偏差,左右范圍均有效,即實際位置坐標(biāo)點與TABLE的比較點的差值在maxerr范圍內(nèi)便有效,觸發(fā)時刻為當(dāng)前位置進(jìn)入比較點的觸發(fā)范圍內(nèi)便觸發(fā)比較,比較范圍示意圖如下。
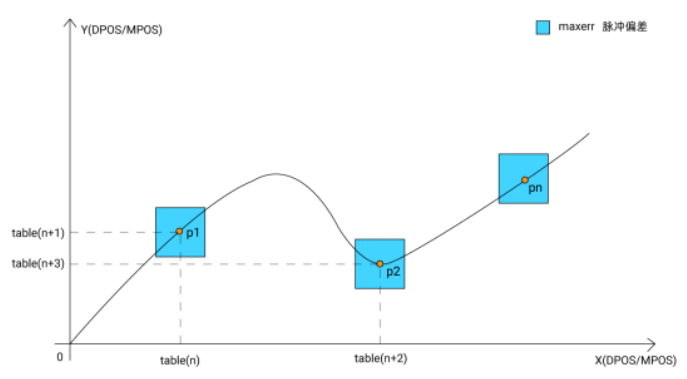
注意:maxerr的單位為脈沖數(shù)的偏差,不是距離的偏差。
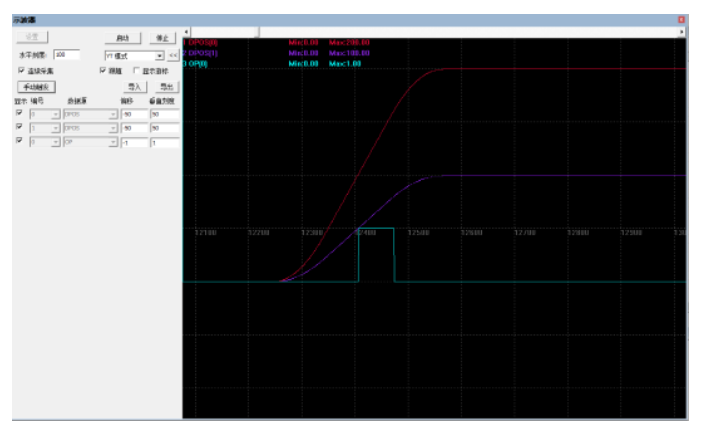
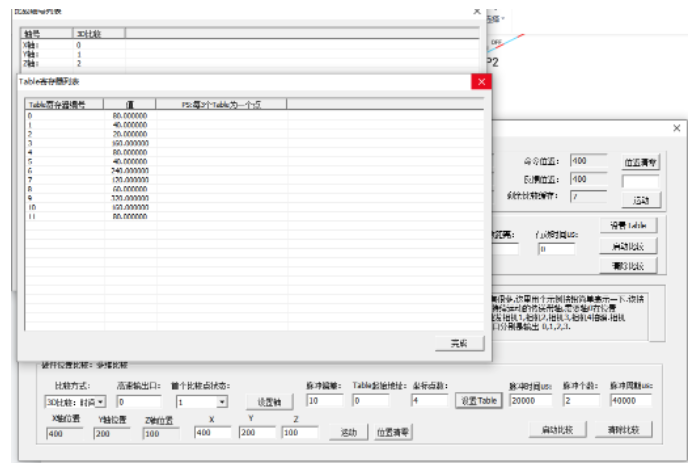
如下圖所示,設(shè)置高速比較輸出口為0,首個比較點的輸出狀態(tài)為1,比較軸為0,1;設(shè)置兩個比較點,比較點坐標(biāo)分別為:(100,50),(160,80)。即當(dāng)軸運動到點(100,50)和點(160,80),誤差范圍在±50個脈沖左右的范圍時,都會觸發(fā)電平變化。
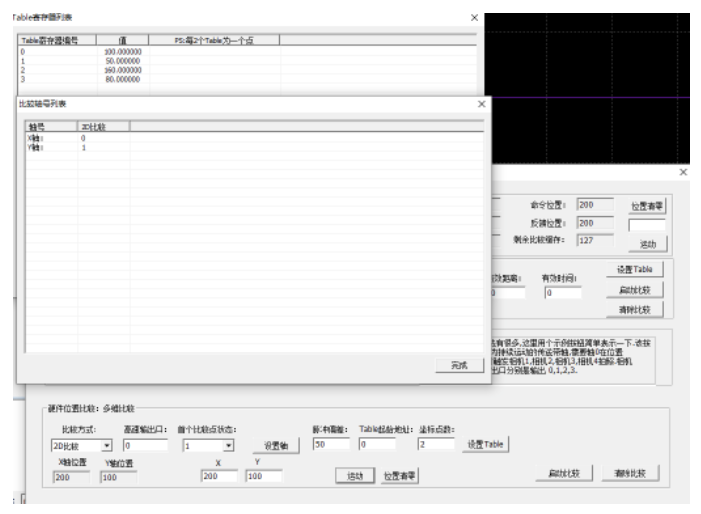
示波器波形如圖所示:在坐標(biāo)(100,50)時輸出為1,直到坐標(biāo)(160,80)的時候恢復(fù)為0。
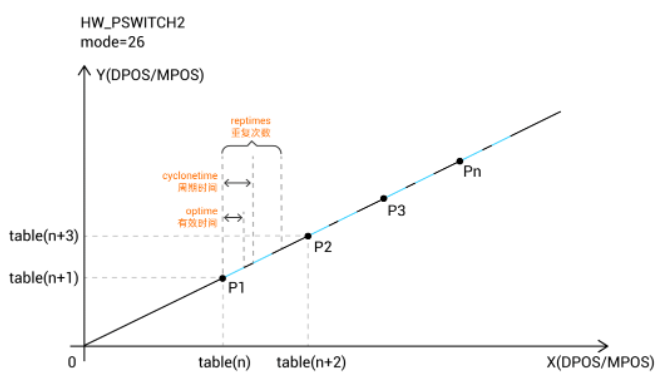
(2)2D比較(模式26)
語法:HW_PSWITCH2(26,opnum,opstate,maxerr,num,tablepos,[ophwtimeus,ophwtimes,hwcyctimeus])
mode 26:二維的比較模式;
opnum:對應(yīng)的輸出口;
opstate:第一個比較點的輸出狀態(tài);
maxerr:比較位置每個軸左右的脈沖偏差,進(jìn)入偏差范圍后開始比較,此參數(shù)不能寫0;
num:table里面存儲的比較點坐標(biāo)個數(shù);
tablepos:第一個比較點坐標(biāo)所在table編號;
* 以下參數(shù)和HW_TIMER二選一,HW_TIMER單獨寫可以動態(tài)調(diào)整參數(shù) *
ophwtimeus:脈沖時間;
ophwtimes:脈沖個數(shù);
hwcyctimeus:脈沖周期。
說明:比較點寫在TABLE中,兩個連續(xù)的TABLE數(shù)據(jù)組成一個2D坐標(biāo),每到達(dá)一個比較位置觸發(fā)OP,每個比較點OP反轉(zhuǎn)的次數(shù)和反轉(zhuǎn)周期由HW_TIMER設(shè)置;到達(dá)下一個TABLE位置,OP再次觸發(fā)。類似模式7和模式36。
該模式主要功能為,碰到設(shè)置好的二維比較點之后,輸出口輸出一斷設(shè)置好的定時脈沖。
該模式使用時,需要指定高速輸出口,將首個比較點的輸出狀態(tài)、比較軸設(shè)置好之后,再設(shè)置比較點(即設(shè)置table寄存器,點數(shù)量等),設(shè)置好比較點之后再設(shè)置脈沖有效時間、脈沖周期時間,以及脈沖個數(shù)(重復(fù)次數(shù)),設(shè)置比較點的脈沖最大誤差等參數(shù)后,啟動比較。緊接著驅(qū)動軸運動即可。
如下圖所示,設(shè)置高速比較輸出口為0,首個比較點的輸出狀態(tài)為1,比較軸為0,1;設(shè)置兩個比較點,比較點坐標(biāo)分別為:(100,100),(200,200)。即當(dāng)軸運動到點(100,100),點(200,200),誤差范圍在±10個脈沖左右的范圍時,都會觸發(fā)兩個周期為60ms,脈沖有效時間為20ms的脈沖。
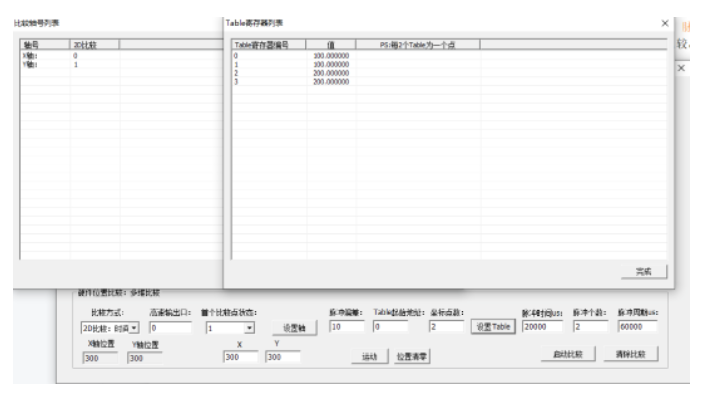
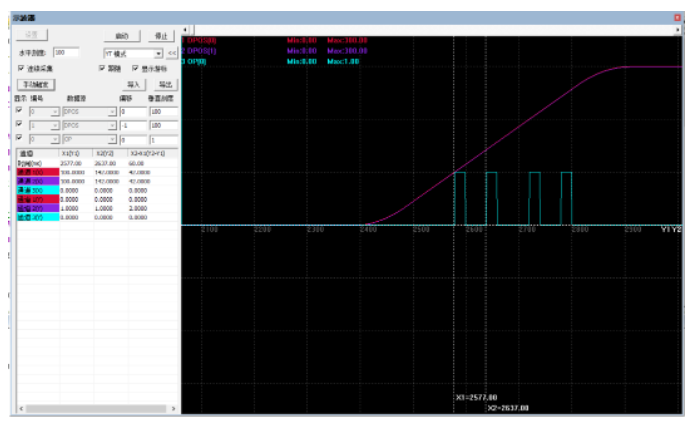
示波器波形如圖所示:在坐標(biāo)(100,100),(200,200)的時候都會觸發(fā)兩個周期為60ms,脈沖有效時間為20ms的脈沖。
3.三維比較模式
(1)3D比較(模式35)
語法:HW_PSWITCH2(35,opnum,opstate,maxerr,num,tablepos)
mode 35:三維的比較模式;
opnum:對應(yīng)的輸出口;
opstate:第一個比較點的輸出狀態(tài);
maxerr:比較位置每個軸左右的脈沖偏差,進(jìn)入偏差范圍后開始比較,此參數(shù)不能寫0;
num:table里面存儲的比較點坐標(biāo)個數(shù);
tablepos:第一個比較點坐標(biāo)所在table編號;
說明:比較點寫在TABLE中,三個連續(xù)的TABLE數(shù)據(jù)組成一個3D坐標(biāo),每到達(dá)一個比較位置觸發(fā)OP,每個比較點OP反轉(zhuǎn)的次數(shù)和反轉(zhuǎn)周期由HW_TIMER設(shè)置;到達(dá)下一個TABLE位置,OP再次觸發(fā)。類似模式26和模式7。
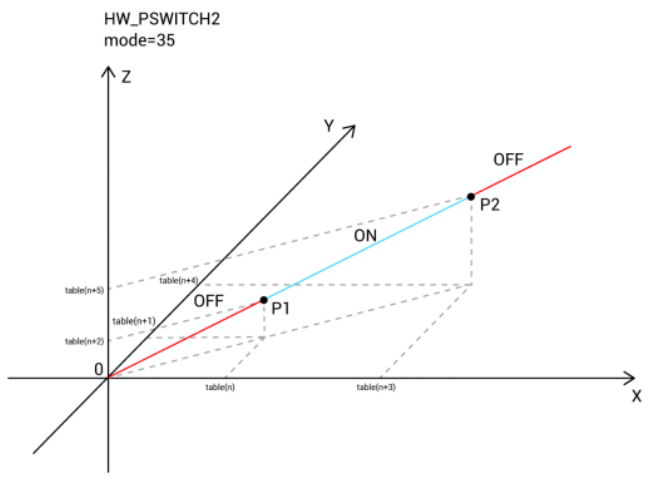
該模式主要功能為,碰到設(shè)置好的三維比較點之后,輸出口電平反轉(zhuǎn)。
該模式使用時需要指定高速輸出口,將首個比較點的輸出狀態(tài)、比較軸設(shè)置好之后,再設(shè)置比較點(即設(shè)置table寄存器,點數(shù)量等),設(shè)置比較點的脈沖最大誤差等參數(shù)后,啟動比較。緊接著驅(qū)動軸運動即可。
如下圖所示,設(shè)置高速比較輸出口為0,首個比較點的輸出狀態(tài)為1,比較軸為0,1,2;設(shè)置4個比較點,比較點坐標(biāo)分別為:(80,40,20),(160,80,40),(240,120,60),(320,160,80)。即當(dāng)軸運動到點(80,40,20),(160,80,40),(240,120,60),(320,160,80),誤差范圍在±10個脈沖左右的范圍時,都會觸發(fā)電平變化。
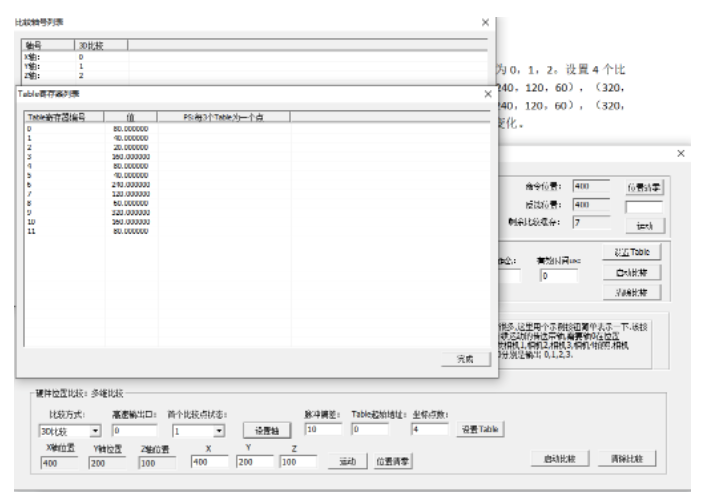
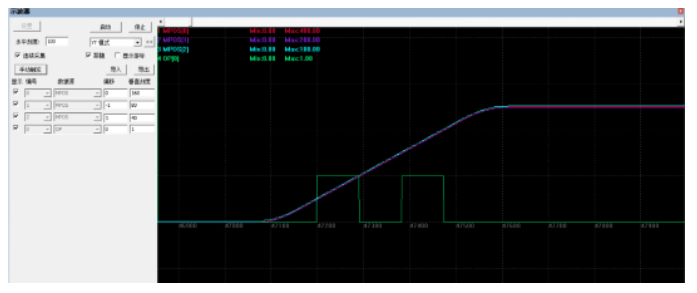
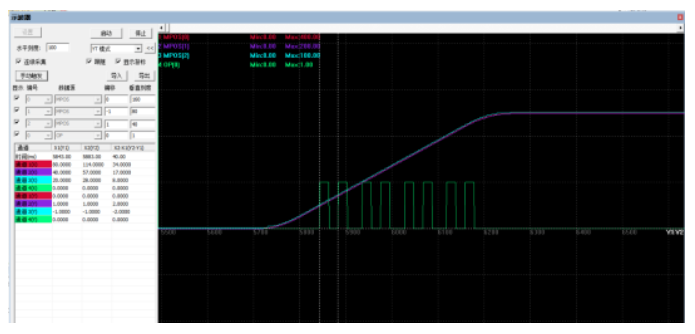
示波器波形如圖所示:在坐標(biāo)(80,40,20),(160,80,40),(240,120,60),(320,160,80)時會發(fā)生電平變化。
核心程序示例:
/*參數(shù):mode 25, 26 ,35,36.2D/3D的比較模式 Axisnum:軸數(shù)組 Opnum :對應(yīng)的輸出口 Opstate: 第一個比較點的輸出狀態(tài). maxerr:比較位置每個軸左右的脈沖偏差, 進(jìn)入偏差范圍后開始比較. num :TABLE 里面存儲的比較點個數(shù). tablepos: 第一個比較點坐標(biāo)所在 TABLE 編號 與 hwtimer 并用時, 可以動態(tài)調(diào)整 hwtimer 參數(shù). ModePara1:脈沖時間 ModePara2:脈沖個數(shù) ModePara3:脈沖周期 */ int32 CMyControlDlg:: ZAux_Direct_HwPswitch2_2D(ZMC_HANDLE handle, int *Axisnum,int Mode,int Opnum , int Opstate,int maxerr,int num, int tablepos, float ModePara1, float ModePara2,float ModePara3) { if(0 > Axisnum[0] || Axisnum[0] > MAX_AXIS_AUX) { return ERR_AUX_PARAERR; } char cmdbuff[2048]; char tempbuff[2048]; char cmdbuffAck[2048]; //生成命令 sprintf(cmdbuff, "BASE(%d,%d)n", Axisnum[0], Axisnum[1]); switch(Mode) { case 25: sprintf(tempbuff, "HW_PSWITCH2(%d,%d,%d,%d,%d,%d)", Mode, Opnum, Opstate, maxerr,num,tablepos); strcat(cmdbuff, tempbuff); break; case 26: sprintf(tempbuff, "HW_PSWITCH2(%d,%d,%d,%d,%d,%d,%f,%f,%f)", Mode,Opnum, Opstate, maxerr,num,tablepos,ModePara1,ModePara2,ModePara3); strcat(cmdbuff, tempbuff); break; case 35: sprintf(tempbuff, "HW_PSWITCH2(%d,%d,%d,%d,%d,%d)", Mode, Opnum, Opstate, maxerr,num,tablepos); strcat(cmdbuff, tempbuff); break; case 36: sprintf(tempbuff, "HW_PSWITCH2(%d,%d,%d,%d,%d,%d,%f,%f,%f)", Mode,Opnum, Opstate, maxerr,num,tablepos,ModePara1,ModePara2,ModePara3); strcat(cmdbuff, tempbuff); break; default: return ERR_AUX_PARAERR; break; } //調(diào)用命令執(zhí)行函數(shù) int ret=ZAux_Execute(handle, cmdbuff, cmdbuffAck,2048); if (strlen(cmdbuffAck)!=0) return ERR_ACKERROR; return ret; }
(2)3D比較(模式36)
語法:HW_PSWITCH2(36,opnum,opstate,maxerr,num,tablepos, [ophwtimeus,ophwtimes,hwcyctimeus])
mode 36:三維的比較模式;
opnum:對應(yīng)的輸出口;
opstate:第一個比較點的輸出狀態(tài);
maxerr:比較位置每個軸左右的脈沖偏差,進(jìn)入偏差范圍后開始比較,此參數(shù)不能寫0;
num:table里面存儲的比較點坐標(biāo)個數(shù);
tablepos:第一個比較點坐標(biāo)所在table編號;
* 以下參數(shù)和HW_TIMER二選一,HW_TIMER單獨寫可以動態(tài)調(diào)整參數(shù) *
ophwtimeus:脈沖時間;
ophwtimes:脈沖個數(shù);
hwcyctimeus:脈沖周期。
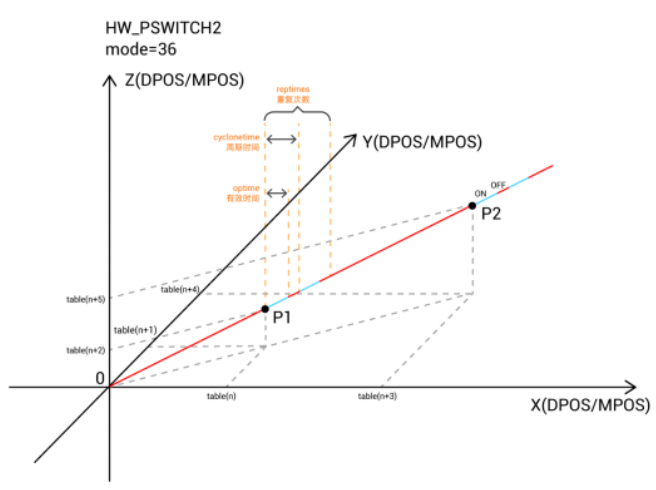
該模式主要功能為,碰到設(shè)置好的三維比較點之后,輸出口輸出一斷設(shè)置好的定時脈沖。
該模式使用時,需要指定高速輸出口,將首個比較點的輸出狀態(tài)、比較軸設(shè)置好之后,再設(shè)置比較點(即設(shè)置table寄存器,點數(shù)量等),設(shè)置好比較點之后再設(shè)置脈沖有效時間,脈沖周期時間,以及脈沖個數(shù)(重復(fù)次數(shù)),設(shè)置比較點的脈沖最大誤差等參數(shù)后,啟動比較。緊接著驅(qū)動軸運動即可。
如下圖所示,設(shè)置高速比較輸出口為0,首個比較點的輸出狀態(tài)為1,比較軸為0,1,2;設(shè)置4個比較點,比較點坐標(biāo)分別為:(80,40,20),(160,80,40),(240,120,60),(320,160,80)。即當(dāng)軸運動到點(80,40,20),(160,80,40),(240,120,60),(320,160,80),誤差范圍在±10個脈沖左右的范圍時,都會觸發(fā)電平變化。都會觸發(fā)兩個周期為40ms,脈沖有效時間為20ms的脈沖。
示波器波形如圖所示:在坐標(biāo)(80,40,20),(160,80,40),(240,120,60),(320,160,80)時會觸發(fā)兩個周期為40ms,脈沖有效時間為20ms的脈沖。
核心程序示例:
/*參數(shù):mode 25, 26 ,35,36.2D/3D的比較模式
Axisnum:軸數(shù)組
Opnum :對應(yīng)的輸出口
Opstate: 第一個比較點的輸出狀態(tài).
maxerr:比較位置每個軸左右的脈沖偏差, 進(jìn)入偏差范圍后開始比較.
num:TABLE 里面存儲的比較點個數(shù).
tablepos: 第一個比較點坐標(biāo)所在 TABLE 編號
與 hwtimer 并用時, 可以動態(tài)調(diào)整 hwtimer 參數(shù).
ModePara1:脈沖時間
ModePara2:脈沖個數(shù)
ModePara3:脈沖周期
*/
int32 CMyControlDlg:: ZAux_Direct_HwPswitch2_2D(ZMC_HANDLE handle, int *Axisnum,int Mode,int Opnum , int Opstate,int maxerr,int num, int tablepos, float ModePara1, float ModePara2,float ModePara3)
{
if(0 > Axisnum[0] || Axisnum[0] > MAX_AXIS_AUX)
{
return ERR_AUX_PARAERR;
}
char cmdbuff[2048];
char tempbuff[2048];
char cmdbuffAck[2048];
//生成命令
sprintf(cmdbuff, "BASE(%d,%d)n", Axisnum[0], Axisnum[1]);
switch(Mode)
{
case 25:
sprintf(tempbuff, "HW_PSWITCH2(%d,%d,%d,%d,%d,%d)", Mode, Opnum, Opstate, maxerr,num,tablepos);
strcat(cmdbuff, tempbuff);
break;
case 26:
sprintf(tempbuff, "HW_PSWITCH2(%d,%d,%d,%d,%d,%d,%f,%f,%f)", Mode,Opnum, Opstate, maxerr,num,tablepos,ModePara1,ModePara2,ModePara3);
strcat(cmdbuff, tempbuff);
break;
case 35:
sprintf(tempbuff, "HW_PSWITCH2(%d,%d,%d,%d,%d,%d)", Mode, Opnum, Opstate, maxerr,num,tablepos);
strcat(cmdbuff, tempbuff);
break;
case 36:
sprintf(tempbuff, "HW_PSWITCH2(%d,%d,%d,%d,%d,%d,%f,%f,%f)", Mode,Opnum, Opstate, maxerr,num,tablepos,ModePara1,ModePara2,ModePara3);
strcat(cmdbuff, tempbuff);
break;
default:
return ERR_AUX_PARAERR;
break;
}
//調(diào)用命令執(zhí)行函數(shù)
int ret=ZAux_Execute(handle, cmdbuff, cmdbuffAck,2048);
if (strlen(cmdbuffAck)!=0)
return ERR_ACKERROR;
return ret;
}
本次,正運動技術(shù)運動控制器PSO視覺飛拍與精準(zhǔn)輸出的C++開發(fā)(三):二維/三維/多軸PSO輸出,就分享到這里。
更多精彩內(nèi)容請關(guān)注“正運動小助手”公眾號,需要相關(guān)開發(fā)環(huán)境與例程代碼,請咨詢正運動技術(shù)銷售工程師。
本文由正運動技術(shù)原創(chuàng),歡迎大家轉(zhuǎn)載,共同學(xué)習(xí),一起提高中國智能制造水平。文章版權(quán)歸正運動技術(shù)所有,如有轉(zhuǎn)載請注明文章來源。
審核編輯黃宇
-
運動控制器
+關(guān)注
關(guān)注
2文章
401瀏覽量
24704 -
C++
+關(guān)注
關(guān)注
22文章
2108瀏覽量
73620 -
PSO
+關(guān)注
關(guān)注
0文章
49瀏覽量
12939
發(fā)布評論請先 登錄
相關(guān)推薦
單軸PSO視覺飛拍與精準(zhǔn)輸出:EtherCAT超高速實時運動控制卡XPCIE1032H上位機(jī)C#開發(fā)(七)

二維/三維的多軸PSO視覺飛拍與精準(zhǔn)輸出:EtherCAT超高速實時運動控制卡XPCIE1032H上位機(jī)開發(fā)
三維觸控技術(shù)突破“二向箔”的束縛
三維設(shè)計應(yīng)用案例
安徽三維動畫制作和二維動畫有哪些區(qū)別呢?(一)
安徽三維動畫制作和二維動畫有哪些區(qū)別呢?(三)
【正運動】XPCIE1032與MotionRT7實時內(nèi)核的配合具有哪些優(yōu)勢?
基于Rhino3D開發(fā)平臺的鞋楦二、三維相互相轉(zhuǎn)換的設(shè)與實現(xiàn)
一維卷積、二維卷積、三維卷積具體應(yīng)用

高精度等間距二維三維PSO輸出教程
運動控制器多工位位置比較輸出在轉(zhuǎn)盤式視覺篩選設(shè)備中的應(yīng)用


運動控制器PSO視覺飛拍與精準(zhǔn)輸出的C++開發(fā)(一):單軸PSO

運動控制器PSO視覺飛拍與精準(zhǔn)輸出的C++開發(fā)(二):多軸PSO等距/周期輸出
二維/三維的多軸PSO視覺飛拍與精準(zhǔn)輸出:EtherCAT超高速實時運動控制卡XPCIE1032H上位機(jī)C#開發(fā)(八)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論