") 高效測(cè)量“芯”搭檔 | 航芯ACM32激光測(cè)距儀應(yīng)用方案
高效測(cè)量“芯”搭檔 | 航芯ACM32激光測(cè)距儀應(yīng)用方案
隨著工業(yè)自動(dòng)化和機(jī)器視覺的快速發(fā)展,激光測(cè)距技術(shù)憑借其抗干擾能力強(qiáng)、精度高等優(yōu)勢(shì),在檢測(cè)、測(cè)量和控制等行業(yè)領(lǐng)域中得到廣泛應(yīng)用。
一、激光測(cè)距儀概述
激光測(cè)距儀是利用激光對(duì)目標(biāo)的距離進(jìn)行準(zhǔn)確測(cè)定的儀器。激光測(cè)距儀在工作時(shí)向目標(biāo)射出一束很細(xì)的激光,由光電元件接收目標(biāo)反射的激光束,計(jì)時(shí)器測(cè)定激光束從發(fā)射到接收的時(shí)間,計(jì)算出從觀測(cè)者到目標(biāo)的距離。激光測(cè)距儀分為手持激光測(cè)距儀和望遠(yuǎn)鏡式激光測(cè)距儀。
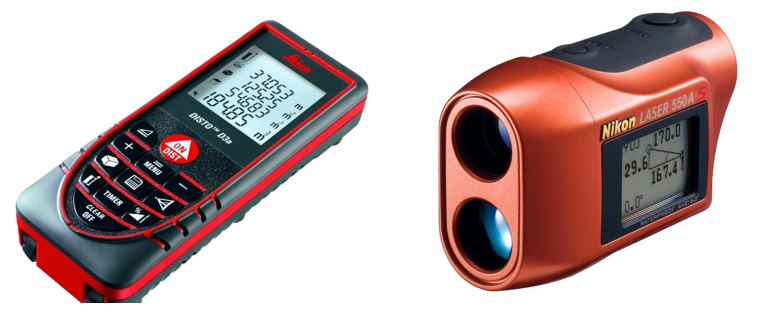 左 | 手持激光測(cè)距儀 ? ?右 | 望遠(yuǎn)鏡式激光測(cè)距儀
左 | 手持激光測(cè)距儀 ? ?右 | 望遠(yuǎn)鏡式激光測(cè)距儀手持激光測(cè)距儀
測(cè)量距離一般在200米內(nèi),精度在2mm左右。這是目前使用范圍較廣的激光測(cè)距儀。在功能上除能測(cè)量距離外,一般還能計(jì)算測(cè)量物體的體積。
望遠(yuǎn)鏡式激光測(cè)距儀
測(cè)量距離比較遠(yuǎn),一般測(cè)量范圍在3.5米-2000米左右,由于測(cè)距望遠(yuǎn)鏡的準(zhǔn)直性要求,3.5米以下為盲區(qū),大于2000米以上的激光望遠(yuǎn)鏡一般采用YAG激光,波長(zhǎng)為1.064微米,為了達(dá)到較大的測(cè)量量程,所以激光功率較大,建議使用者注意激光防護(hù)。主要應(yīng)用范圍為戶外中、長(zhǎng)距離測(cè)量。
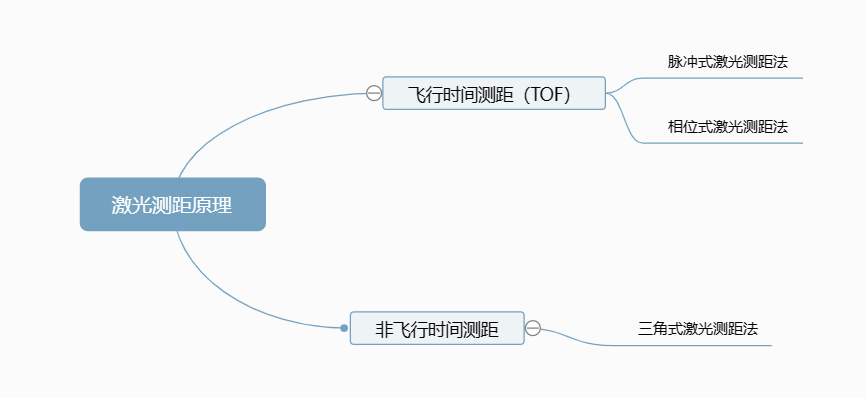
激光測(cè)距儀原理
根據(jù)基本原理,實(shí)現(xiàn)激光測(cè)距的方法有兩大類:飛行時(shí)間(TOF)測(cè)距和非飛行時(shí)間測(cè)距,飛行時(shí)間測(cè)距中有脈沖式激光測(cè)距和相位式激光測(cè)距,非飛行時(shí)間測(cè)距主要是三角激光測(cè)距,如下圖所示:
脈沖式激光測(cè)距法
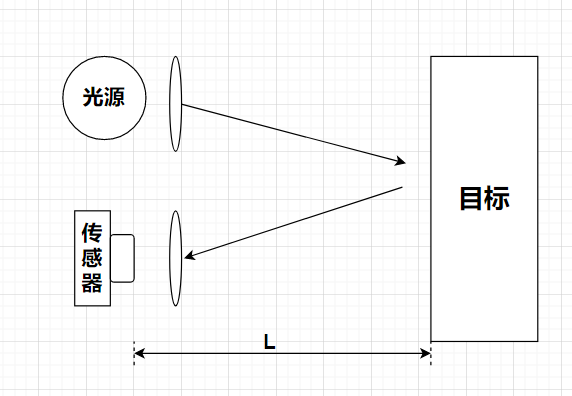
脈沖式測(cè)距是激光技術(shù)最早應(yīng)用于測(cè)繪領(lǐng)域中的一種測(cè)量方式。由于激光發(fā)散角小,激光脈沖持續(xù)時(shí)間極短,瞬時(shí)功率極大可大兆瓦以上,因而可以達(dá)到極遠(yuǎn)的測(cè)程。一般情況下不使用合作目標(biāo),而是利用被測(cè)目標(biāo)對(duì)光信號(hào)的漫反射來測(cè)距,脈沖式測(cè)距適合遠(yuǎn)距離測(cè)量,測(cè)量距離可表示為:
L=cΔt/2
式中L為測(cè)量距離,c為光在空氣中傳播的速度, Δt為光波信號(hào)在測(cè)距儀與目標(biāo)往返的時(shí)間。原理圖如下所示:
相位式激光測(cè)距法
相位式激光測(cè)距通常適應(yīng)于中短距離的測(cè)量,測(cè)量精度可達(dá)毫米、微米級(jí),也是目前測(cè)距精度最高的一種方式,大部分短程測(cè)距儀都采用這種工作方式。相位式測(cè)距則是將一調(diào)制信號(hào)對(duì)發(fā)射光波的光強(qiáng)進(jìn)行調(diào)制,通過測(cè)量相位差來間接測(cè)量時(shí)間,較直接測(cè)量往返時(shí)間的處理難度降低了許多。
三角測(cè)距法
三角測(cè)距法即光源、被測(cè)物面、光接收系統(tǒng)三點(diǎn)共同構(gòu)成一個(gè)三角形光路,由激光器發(fā)出的光線,經(jīng)過匯聚透鏡聚焦后入射到被測(cè)物體表面上,光接收系統(tǒng)接收來自入射點(diǎn)處的散射光,并將其成像在光電位置探測(cè)器敏感面上,通過光點(diǎn)在成像面上的位移來測(cè)量被測(cè)物面移動(dòng)距離的一種測(cè)量方法。
脈沖式TOF的優(yōu)點(diǎn)是測(cè)量范圍廣且光學(xué)系統(tǒng)緊湊,但是高速讀取脈沖光的電路設(shè)計(jì)和配置較為復(fù)雜。相位式TOF在近距離測(cè)量中測(cè)量精度更高,同時(shí)由于無需時(shí)間測(cè)量的電路,電路設(shè)計(jì)比較簡(jiǎn)單,因而此方法可以用于整列傳感器中,然而相位式TOF不能分辨實(shí)際距離在一個(gè)還是多個(gè)測(cè)量周期內(nèi),因而不適用于長(zhǎng)距離的測(cè)量。三角測(cè)距法的優(yōu)勢(shì)是小距離下測(cè)量精度高,但是缺點(diǎn)為電路的小型集成化比較困難,并且測(cè)量易受外界環(huán)境光的影響。
二、芯片介紹
ACM32F0X0系列是一款支持多種低功耗模式的通用MCU。集成12位1.6 Msps高精度ADC以及比較器、運(yùn)放、觸控按鍵控制器、段式LCD控制器,內(nèi)置高性能定時(shí)器、多路UART、LPUART、SPI、I2C等豐富的通訊外設(shè),內(nèi)建AES、TRNG等信息安全模塊,支持多種低功耗模式,具有高整合度、高抗干擾、高可靠性的特點(diǎn)。
三、設(shè)計(jì)方案
本文描述的激光測(cè)距儀方案,基于上海航芯ACM32F070系列MCU進(jìn)行設(shè)計(jì),測(cè)距原理是脈沖測(cè)距法,整體的方案框圖如下所示:
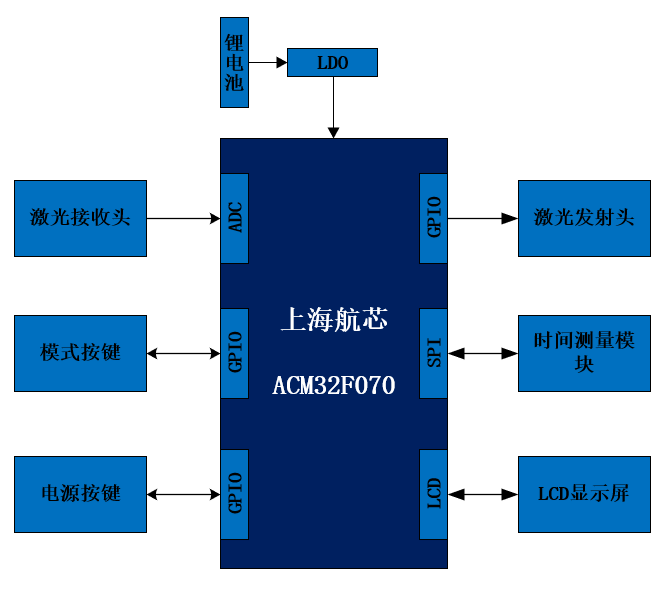 基于ACM32F070激光測(cè)距儀設(shè)計(jì)方案框圖
基于ACM32F070激光測(cè)距儀設(shè)計(jì)方案框圖激光測(cè)距儀包含主控MCU、激光接收模塊、激光發(fā)射模塊、LDO穩(wěn)壓源、ADC、LCD顯示屏、電源及一些外圍的器件組成。主控MCU實(shí)現(xiàn)了激光測(cè)距儀的整體邏輯,提供數(shù)據(jù)顯示和控制激光發(fā)射和接收模塊的作用。
本次方案采用的測(cè)距原理是脈沖法測(cè)距,利用了激光脈沖持續(xù)時(shí)間極短、瞬時(shí)功率很大的特點(diǎn),即使沒有合作目標(biāo),也能通過接收被測(cè)目標(biāo)的漫反射信號(hào),進(jìn)行距離測(cè)量。ACM32F070通過GPIO驅(qū)動(dòng)外部激光發(fā)射模塊,來達(dá)到控制和驅(qū)動(dòng)激光發(fā)射,激光發(fā)射模塊發(fā)射激光后,反射到激光接收模塊,激光接收模塊將光信號(hào)轉(zhuǎn)換為電信號(hào),通過運(yùn)算放大器放大,再由ADC采集,并通過對(duì)比判斷這次接收是否有效,同時(shí)時(shí)間測(cè)量模塊在激光發(fā)射時(shí)計(jì)時(shí),將測(cè)量得到的數(shù)據(jù)通過SPI傳輸?shù)組CU,得到激光發(fā)射到接收的時(shí)間Δt,通過脈沖發(fā)測(cè)距公式L=cΔt/2,由此得到目標(biāo)的距離L。
主控MCU:采用ACM32F070CBT7作為主控芯片,最高工作頻率 64MHz,具備七個(gè)定時(shí)器,一個(gè)12位1.6Msps高精度ADC,支持LCD顯示屏驅(qū)動(dòng)。
激光接收模塊:激光測(cè)距儀的接收模塊首先將光信號(hào)轉(zhuǎn)化為電信號(hào),之后再通過運(yùn)算放大器進(jìn)行放大,通過MCU分析和計(jì)算。
高精度時(shí)間測(cè)量:采用脈沖方式進(jìn)行激光測(cè)距,距離的獲得是通過測(cè)量激光由發(fā)射端到目標(biāo)端來回往返所需的時(shí)間來實(shí)現(xiàn)的,距離很遠(yuǎn)的情況下可以考慮使用MCU內(nèi)部定時(shí)器。
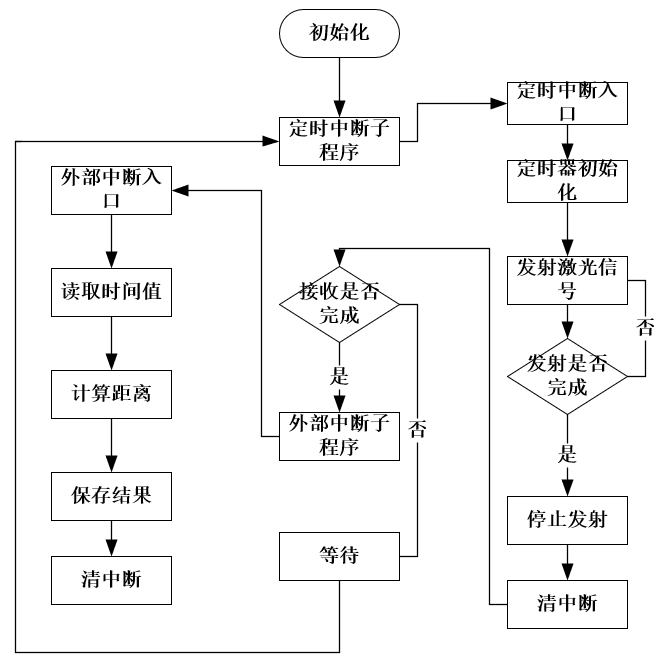
首先初始化ACM32F070的系統(tǒng)時(shí)鐘和其它外設(shè)模塊,初始化時(shí)間測(cè)量模塊和內(nèi)部定時(shí)器,然后定時(shí)驅(qū)動(dòng)激光發(fā)射模塊發(fā)射激光信號(hào),判斷是否成功發(fā)射后停止發(fā)射,通過ADC采集到的電信號(hào)判斷是否成功接收,接收失敗則重新初始化定時(shí)模塊和發(fā)射,接收成功后通過讀取到的時(shí)間值根據(jù)公式換算出距離,通過LCD顯示。測(cè)量軟件流程圖如圖所示:
結(jié)語
如今,激光測(cè)距已在日常生活和社會(huì)生產(chǎn)中有著非常廣泛和實(shí)用的應(yīng)用。隨著激光技術(shù)和數(shù)字處理技術(shù)等科學(xué)技術(shù)不斷發(fā)展,激光測(cè)距將逐漸在生產(chǎn)和生活中有更全面的應(yīng)用。本文提出的設(shè)計(jì)方案介紹了激光測(cè)距儀的基本原理,旨在讓大家更好的了解激光測(cè)距領(lǐng)域。
審核編輯黃宇
-
激光
+關(guān)注
關(guān)注
19文章
3181瀏覽量
64447 -
測(cè)距儀
+關(guān)注
關(guān)注
0文章
116瀏覽量
18429 -
上海航芯
+關(guān)注
關(guān)注
1文章
39瀏覽量
3859
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
BLE藍(lán)牙5.1模塊在高爾夫測(cè)距儀上的應(yīng)用

基于XIAO的迷你激光數(shù)顯測(cè)距儀設(shè)計(jì)

京朗仕特新一代的測(cè)量神奇——防爆激光測(cè)距儀YHJ-350J(A)

激光雪深探測(cè)儀的測(cè)量原理
激光測(cè)距儀如何改成速度計(jì)
YXC有源晶振,頻點(diǎn)50MHZ,超小體積2520封裝,應(yīng)用于激光測(cè)距儀
激光測(cè)距儀真的好用嗎?

國(guó)產(chǎn)可編程振蕩器用于激光測(cè)距儀,兼容SiTime
環(huán)路電阻測(cè)試儀與直流電阻測(cè)距儀是否具有一樣的功能?
YXC可編程差分振蕩器,頻點(diǎn)50MHz,7050封裝,LVDS輸出,應(yīng)用于激光測(cè)距儀





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論