


咋個又搞起掃地機了,害,入手一套代碼,好奇心溢出來了,搓幾篇文章。
首先我們只針對下面的驅動運行,而不追究上層的建圖和規劃,其實對于我們現在來說,只要找到外設的接口對應MCU的IO,然后外設找對就行,電路不用考慮,驗證過了。
去官網看看去!
這所有的掃地機都一樣
真屌的名字,不就是SLAM和超聲波方案
倒也不全是圓的,還有這種的
這個我不敢BB,因為我沒有拆過不知道有沒有攝像頭
這個不錯,我研究過云鯨的
米家掃地機基于空氣動力學的流線型風道設計,喇叭口狀(貌似很有道理哈,想想吹風機)設計形成高靜壓區,大幅增強吸力,而風道內壁迎風側三段弧面設計,平滑引導氣流,可大幅提高風量利用率。
Allwinner ARM Cortex-A7架構的四核應用處理器,這個用來SLAM和視覺,下一個DSP是雷達的,后面是機器的驅動部分
DSP很少見(我沒見識)

你敢相信在這里頭,在激光雷達里面呀

配色好看

黃框美光MT41K256M16TW-107 DDR3LSDRAM,橙框AXP223電源系統管理芯片,紅框東芝THGBMDG5D1LBAIL 4GB se-MMC,綠框RTL8189ETV無線模塊:


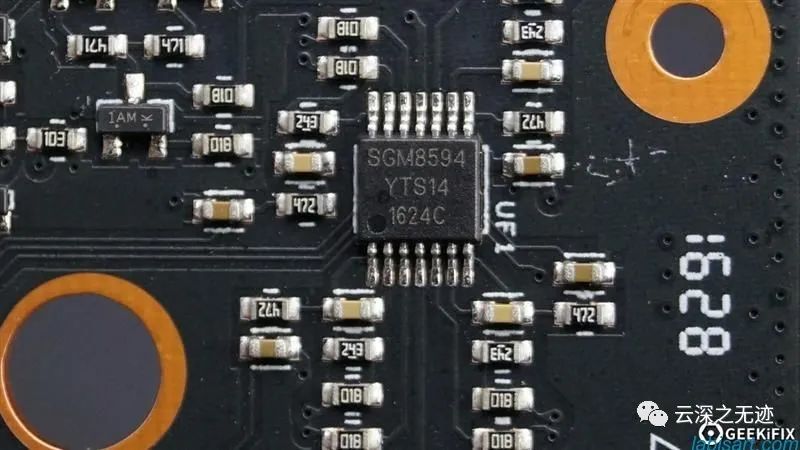
SGM8594精密運算放大器


開關微動按鍵與其藍白雙色LED背景燈
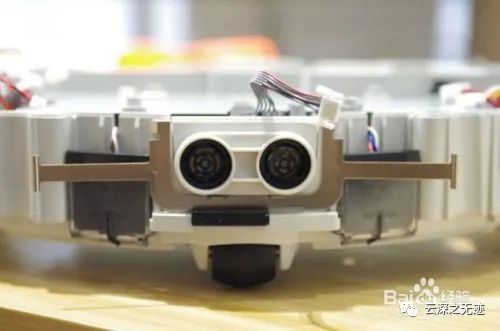

超聲波

PCB上方的是東芝TC74HC4049A反相緩沖器

SGM722970μA 10MHz Rail-to-RailI/OC MOS Operational Amplifier運算放大器,TI德州儀器HC0263A
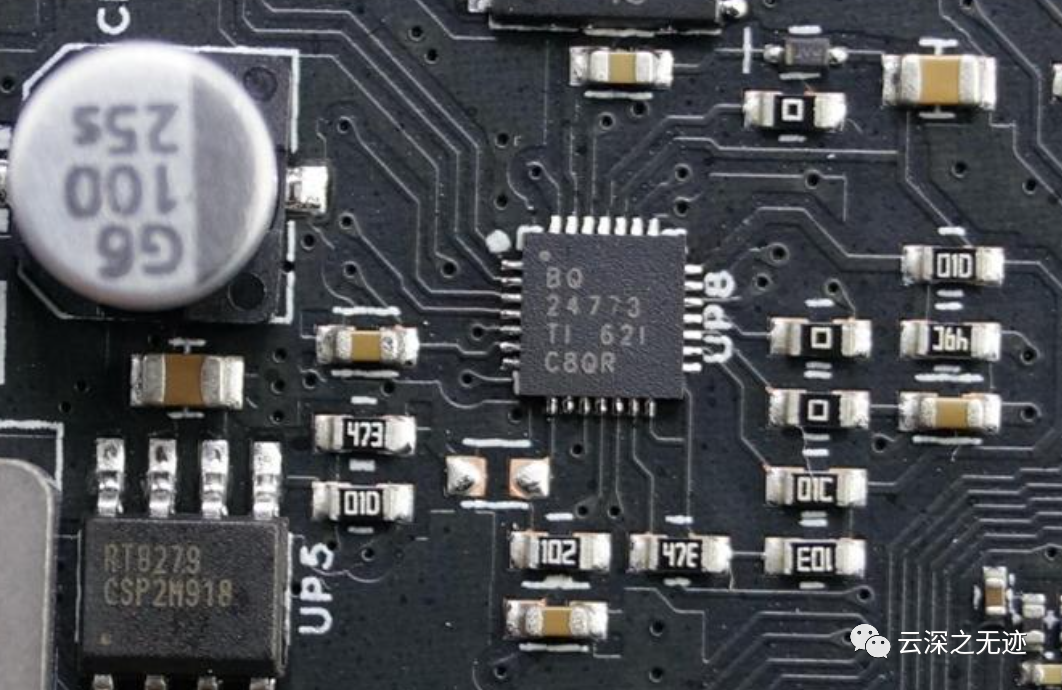
TI德州儀器BQ24773充電管理IC
MC34063A(電源管理芯片)【降壓為各芯片提供電源】 AO4407A(場效應管)【配合電源芯片提供大電流】 AM2849(直流電機驅動模塊)【主要是驅動兩個輪的電機】 LM324(四運放)【為紅外模塊提供服務】 5W4ΩJ(水泥電阻)【大電流】 萬變不離其宗的電路理念:一塊主板,最主要的是核心芯片,其它就是輔助作用的模塊芯片,然后才是組成模塊的外圍電路。學習要從整體,從大局入手,再分解到一些小單元。 探索方向:主芯片->模塊芯片->圍元件;這跟學基礎不同,學基礎是相反的。

在系統中有BMI的代碼,看遍小米家的東西也沒有這個方案
我后面找到一個這樣的東西,我覺得合理!
系統基于陀螺儀實現慣性導航,室內定位,實現智能掃地機器人全屋覆蓋清潔算法:
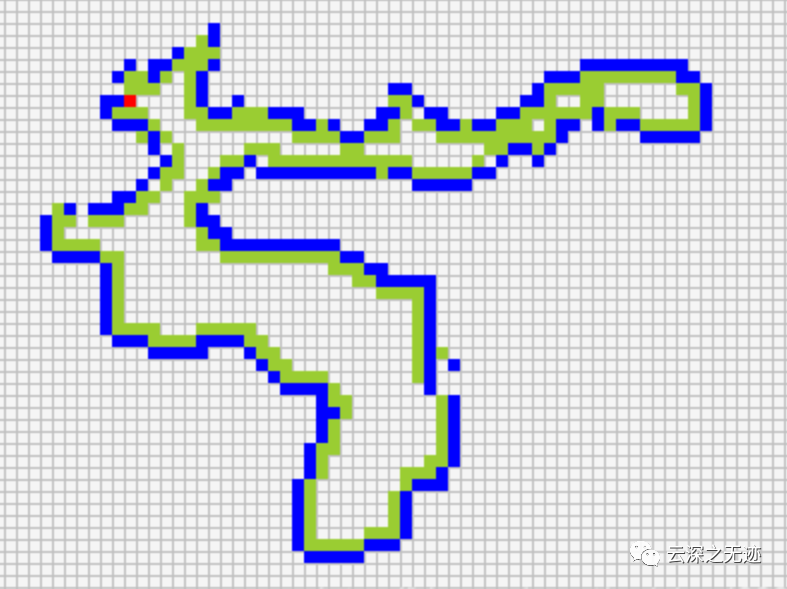
慣導系統
所以應該是陀螺儀地圖導航技術,是一種利用慣性元件,通過微芯片處理器執行計算,融合高精度陀螺儀及加速度計碼盤等數據,在運動中執行慣性導航,建立地圖的技術。
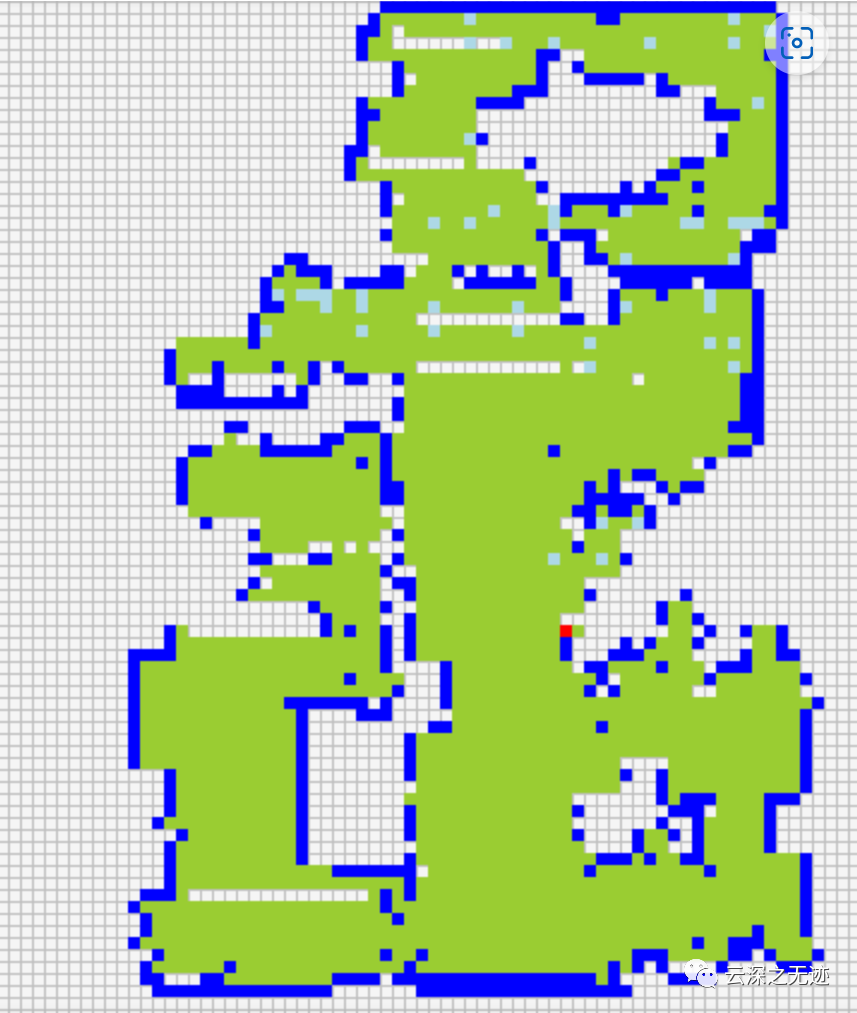
精巧的SLAM系統
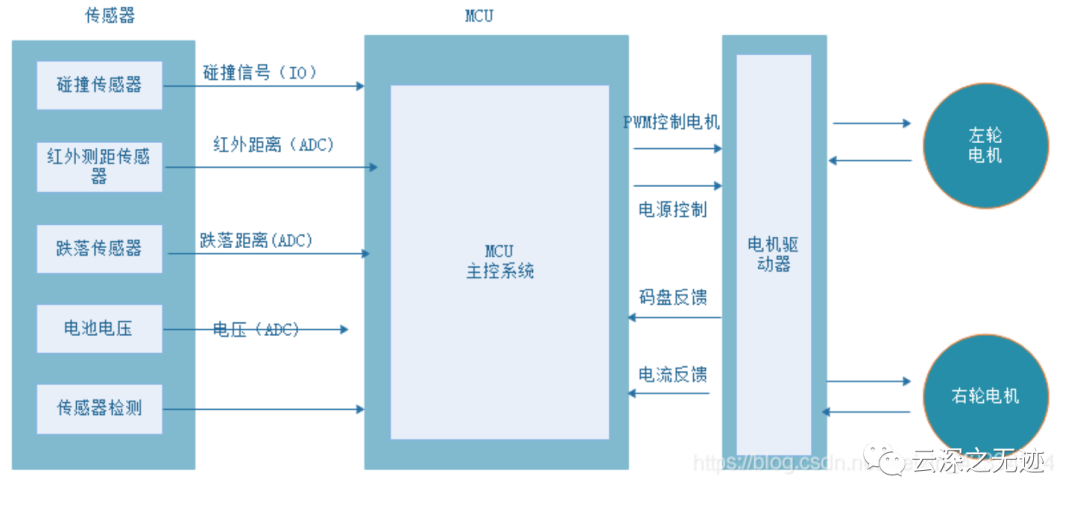
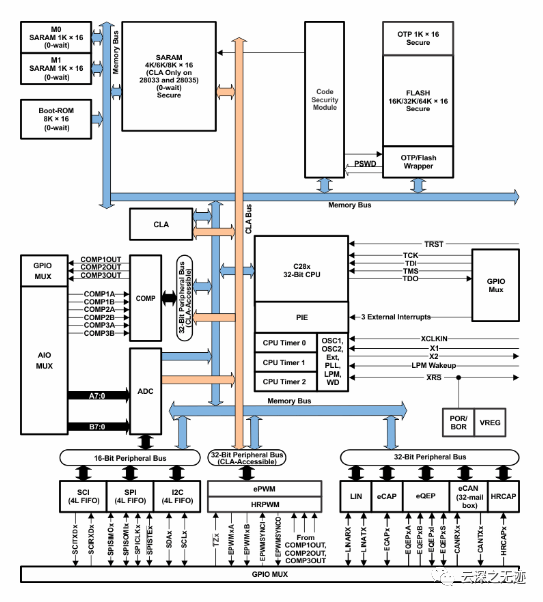
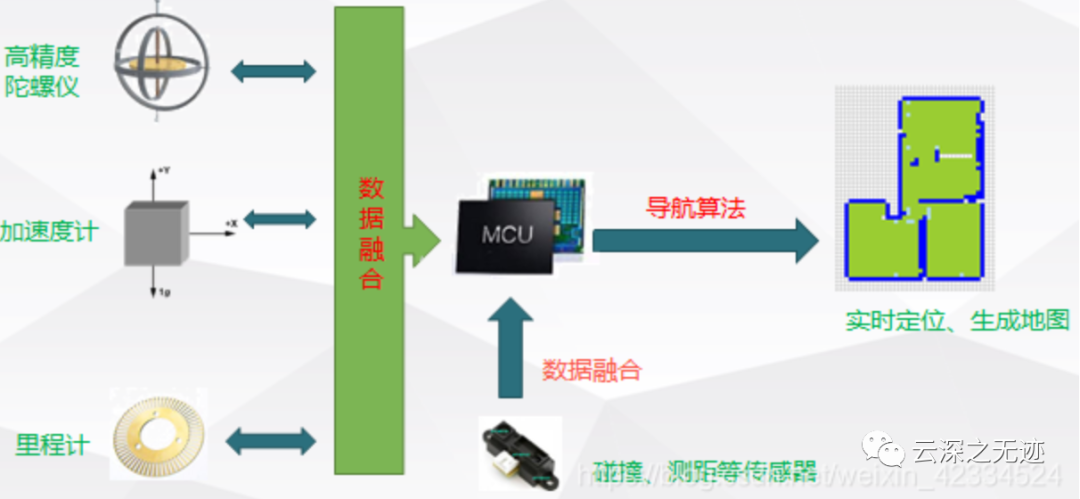
系統構架
編輯:黃飛
-
dsp
+關注
關注
556文章
8155瀏覽量
356993 -
mcu
+關注
關注
146文章
17956瀏覽量
365889 -
應用處理器
+關注
關注
0文章
180瀏覽量
28927 -
小米
+關注
關注
70文章
14470瀏覽量
147141 -
掃地機
+關注
關注
0文章
63瀏覽量
5661
原文標題:手把手教你開發一個小米掃地機(騙人篇)
文章出處:【微信號:TT1827652464,微信公眾號:云深之無跡】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄





 工商網監
工商網監

評論