 基于iToF的3D視覺測量方案
基于iToF的3D視覺測量方案
與通過測量光傳播時間直接計算距離的直接飛行時間(ToF)不同,間接飛行時間(iToF)技術從反射光脈沖的相位進行測量。本文將重點介紹iToF和當今部署該技術的諸多行業,包括機器人技術、物流、建筑測繪以及最近的智能交通系統(ITS)。
許多苛刻的應用具有許多要求和更多挑戰
能夠從iToF受益的應用要求包含一系列特性,包括視場、距離范圍、反射率范圍和3D幀率。這些對于ToF系統和ToF傳感器的設計至關重要。由于靈活性,iToF可以為工廠安全等室內應用和監控或ITS等室外應用提供精確測量。iToF適用于反射率范圍小的應用(如拾放機器人)和反射率范圍大的應用(倉庫/物流管理);適用于車內應用等短程應用和自動駕駛等遠程應用;還適用于機器人導航等小視場應用和建筑/建筑測繪等大視場應用。
iToF如何運行?
iToF技術根據多個圖像(或相位)來估計物體的距離。如圖1所示,前兩個圖像是在180度相位下獲得的,通過計算每個相位捕獲的電荷比率可以估計距離,其中第三個圖像則用于去除背景噪聲。
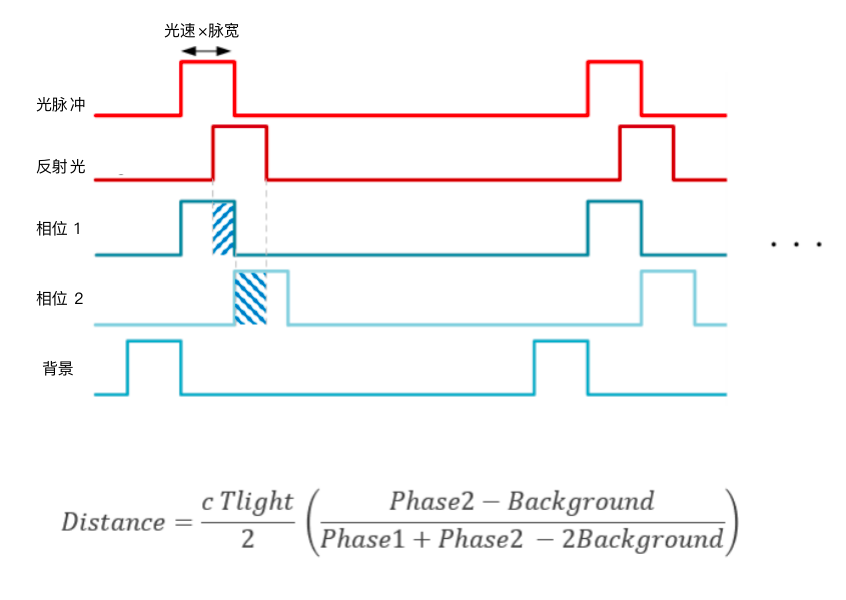
圖1:iToF距離算法示例
“可靠的距離測量”在3D應用中意味著什么?這意味著非常精確和準確的測量,但又不限于此。也就是說不僅要確保精確和準確地獲得測量結果,同時具有良好的角分辨率,運動模糊/偽影最小,又要可以以合理的性能感測最小和最大距離處的黑暗和明亮物體,等等。因此,可靠的距離測量與非常高的靈活性緊密相關,更靈活的傳感器可以實現更可靠的測量。
無運動偽影的可靠測量
如上所述,在iToF中,需要多張圖像來估計物體的距離。在所描述的示例中,需要三個圖像(兩個相位+背景)。如果使用當今最常見的單暫存節點像素傳感器,則需要依次曝光和讀出多個相位。拍攝一次光以獲得相位0,另一次以獲得相位1,然后在沒有光和讀出的情況下運行第三次采集以獲取背景。只有這樣才能計算3D圖像。因此,如果有移動的物體,就會出現運動偽影,因為物體在每次捕捉中都會處于不同的位置。此外,光線需要拍攝兩次,每個相位一次。 使用多暫存節點像素傳感器,例如所示示例的3暫存節點像素,所有曝光和讀出均以交錯方式進行,因此所有相位幾乎都是并行采集的,從而最大限度地減少運動偽影。此外,由于可以使用單列光脈沖即可捕獲所有相位,因此它降低了平均光功率,這從眼睛安全和功耗角度來看都很重要。 圖2描述了這兩種情況:
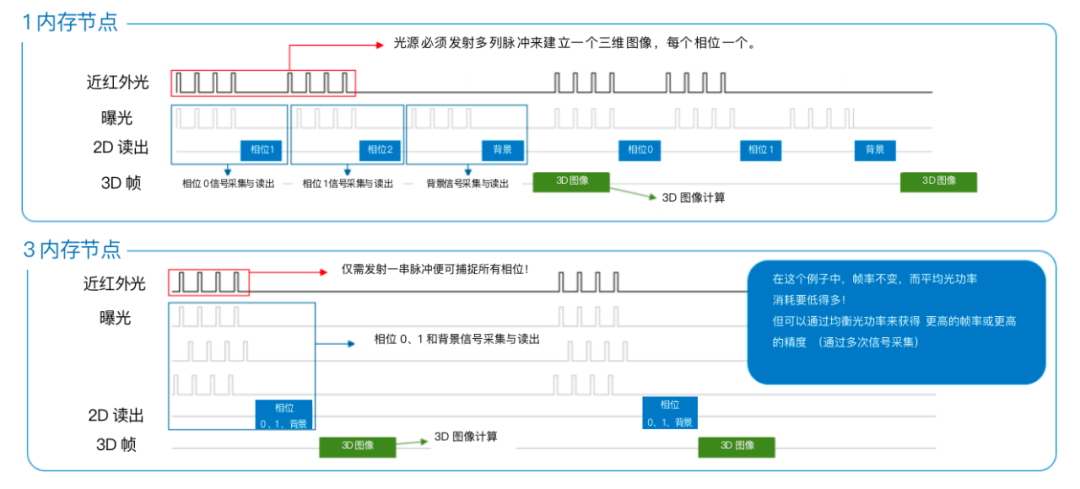
圖2:單暫存節點和多暫存節點像素之間的差異
請注意,運動偽影和運動模糊之間的區別類似于2D視覺中卷簾快門和全局快門之間的區別。運動模糊可以稍微扭曲快速移動的物體,但不會提供錯誤信息,而運動偽影可以極大地改變物體的外觀并提供錯誤的測量結果,這在某些應用中可能會產生重大后果。
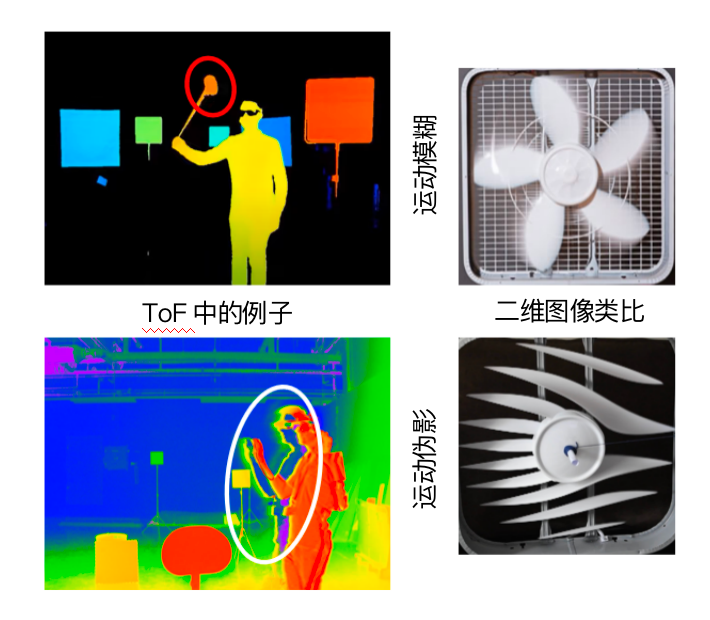
圖3:運動模糊/運動偽影 - 兩種不同的現象
高動態范圍的可靠測量
ToF的另一個關鍵問題是動態范圍。由于物體的反射率和應用所需的距離范圍的綜合作用,ToF本質上是一種動態范圍非常高的應用。為了說明這一點,假設一個原始應用旨在檢測反射率在15%到85%之間且距離為0.5米到6米的物體,需要改進以檢測反射率在1.8%到95%之間且距離達10米的物體。在這些條件下,新案例需要的動態范圍是原始案例的25倍以上。這樣的要求僅靠像素本身的滿井容量,不足以滿足。 Teledyne e2v的Hydra3D ToF CMOS圖像傳感器嵌入特定技術來滿足如此巨大的動態范圍要求,即通過多次捕獲的非破壞性讀出與高幀率相結合,使其適用于大多數應用案例。
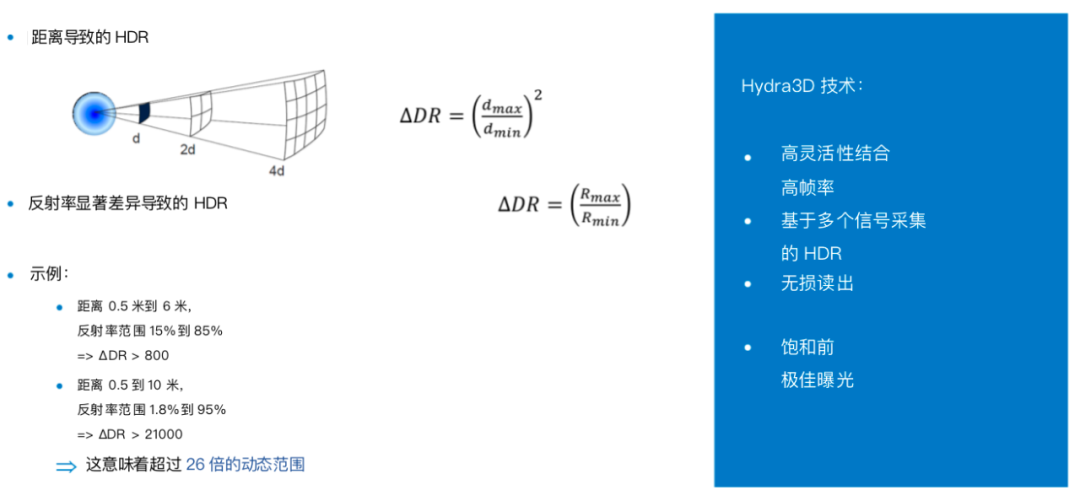
圖4:ToF本質上是一個非常高動態范圍的應用,傳感器必須管理它
在所有條件下都具有高度靈活性的可靠測量
在ToF中,蠻力通常不是一個好主意。在距離范圍、反射率、動態等方面具有高度靈活性以適應非常廣泛的情況,顯然是一項重要優勢。在Hydra3D中,單個觸發器啟動一系列采集和讀出并且非常容易編程,從而成為一個非常強大的工具,適應每個應用的條件。這看似復雜實際上很簡單,如圖5所示。 第一個藍色輪廓矩形是三個相位的曝光和讀出,產生一個3D圖像。可以在每個測量序列(綠色輪廓矩形)中進行多次采集(藍色輪廓矩形),以增加動態范圍或提高精度。此外,具有多個測量序列允許在不同的距離范圍內進行測量,或以不同的精度水平進行測量,或執行2D捕獲。這一切都發生在一個觸發器中。最重要的是,序列可以逐幀實時更改,而無需停止傳感器。
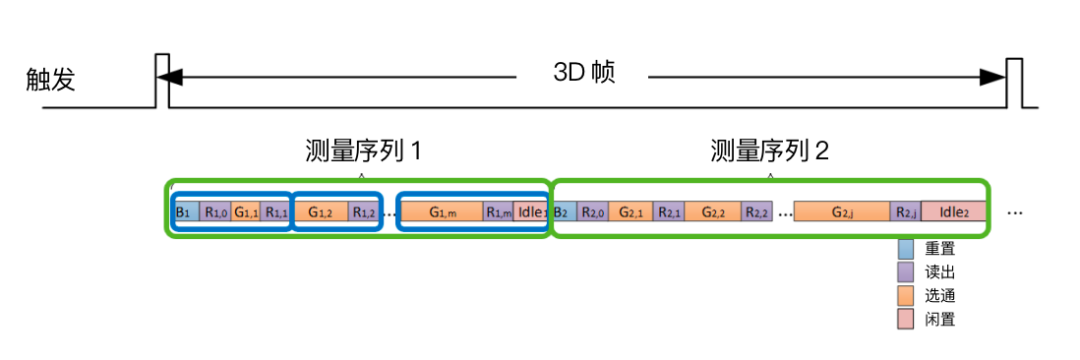
圖5:高度的靈活性允許擁有不同的測量序列以完美地滿足應用需求 這種高可配置性可用于為每個應用在距離范圍、反射率范圍、精度、幀率、光功率等之間找到最佳權衡。 現在讓我們看看這種靈活性優勢的一些示例: 對于距離范圍和反射率范圍較小的應用,具有單個3D采集的配置(僅第一個藍色輪廓矩形)就足夠了。在這種情況下,動態范圍不會是最大的,但可以達到100 fps的幀率,并且完全沒有運動模糊。 對于由于距離范圍和/或反射率范圍大而需要使用HDR功能的應用,可以執行多次采集和讀出(幾個藍色輪廓矩形)以增加動態范圍。通過這樣的應用,可以在10米范圍內實現大約25 fps,目標反射率在15%到85%之間。
對于覆蓋10米距離范圍但使用三個不同范圍以在整個范圍內保持高精度的應用。為此,可以使用多個測量序列(綠色輪廓矩形)實時從一個切換到另一個,具體取決于目標對象的位置。因此,可以在較小的距離范圍內達到精度,但覆蓋的距離范圍更大。
對環境穩健的可靠測量
最后一個挑戰是解決多系統干擾問題。由于ToF需要主動照明,因此一個系統可能會受到在同一區域同時工作的另一個系統發出的光的干擾。這會導致不正確的距離測量。為了對這些干擾具有穩健性,多系統管理被嵌入到Hydra3D傳感器的片上。正因為如此,系統之間可以完美運行,不會造成任何相互干擾,也不會產生任何聯系。
傳感器級創新
傳感器級別的創新有助于克服使許多飛行時間應用難以有效實施的挑戰。像Teledyne e2v的Hydra3D這樣的傳感器實現了所有這些創新:它高于市場上的平均空間分辨率,具有832 x 600像素,支持高視場和良好的角分辨率。這是一個3暫存節點像素,適用于三相位iToF技術,即使對于快速移動的物體也能進行可靠的3D檢測而不會出現運動偽影。它還可以降低功耗并提高人眼安全性。此外,它在管理高動態范圍(這在ToF中非常重要)方面非常靈活,使其適用于所有環境,并且可以配置用于距離測量,包括交錯2D和3D信息捕獲。最后,它集成了一個片上功能,可對在同一區域工作的其他系統造成的干擾提供穩健性,因此相機制造商在設計系統時無需解決此問題。 由于機器人、物流、建筑測繪和ITS等行業需要更精確和可靠的測量,間接飛行時間技術將使測量具有穩健性和靈活性,沒有偽影。
審核編輯:湯梓紅
-
傳感器
+關注
關注
2550文章
51035瀏覽量
753083 -
機器人
+關注
關注
211文章
28380瀏覽量
206918 -
3D
+關注
關注
9文章
2875瀏覽量
107485 -
視覺測量
+關注
關注
0文章
8瀏覽量
6877 -
itof
+關注
關注
0文章
16瀏覽量
2419
原文標題:基于iToF的3D視覺測量方案
文章出處:【微信號:機器視覺沙龍,微信公眾號:機器視覺沙龍】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
基于iToF的3D視覺測量方案
ADI公司推出首款用于3D景深測量和視覺系統的高分辨率模塊

哪位大俠用過imaging-lab 開發過3D視覺測量的項目,求指點
3D視覺及AR的測量與應用
工業3D視覺先行者,漢振創新機器視覺解決方案
談3D視覺應用方案光學測量分類以及其原理
Zivid 3D視覺解決方案的優勢是什么
ADI公司推出首款用于3D景深測量和視覺系統的高分辨率模塊
奧比中光全棧式3D方案助力機器人視覺進化
【世說芯品】ADI推出首款用于3D景深測量和視覺系統的高分辨率模塊

3D視覺的三大優勢





 工商網監
工商網監
評論